1.本发明涉及输变电设备智能运维技术领域,更具体地,涉及一种电缆隧道巡检机器人状态检测方法及装置。
背景技术:
2.随着我国城镇化建设的深入推进,电力电缆已成为承担城市电力输送重要作用的主动脉。高压电力电缆安装在地下隧道(或管廊)中,运行环境通常较为恶劣,人工运维不但工作量大、效率低,而且危险度高。目前电缆隧道安装了较多在线监测装置或轨道式巡检机器人,但在巡检精细化效果方面目前仍无法完全替代人工巡检。其中在线监测系统布设成本高,仅光纤测温一项就需要沿电缆全长为每相电缆布设测温光纤,工程费用极高,且对于“两端架空、中间入地”的混合线路,更是缺少有效的数据上传方式。轨道式机器人需在隧道内进行轨道施工,成本高、工期长,恶劣环境对人员危害性大,且容易对隧道结构造成破坏。除轨道式外的其他地面行走式机器人,其检测作业内容虽然更为全面,但其运行性能容易受隧道环境影响(例如涉水和避障),因此尚未有成熟方案开展大规模应用。
3.若是依赖于机器人开展全自主巡检和状态评价,需要机器人作业系统的准确性和有益性是可信的,因此需要有效的手段来对电缆隧道巡检机器人进行状态检测。电缆隧道巡检机器人为了实现全自主巡检作业,其检测作业系统是复杂的。如何运用巡检机器人系统实时运行参数,全面监视机器人系统动态特性、了解机器人系统工作性能、评估电缆隧道巡检机器人巡检作业效能,是为电缆及隧道运行工况实时状态评价提供科学有效依据的前提与关键。但现有技术中还没有较好的方法能够实现上述目的。
4.现有技术1(cn110142803a)提出了“一种移动焊接机器人系统工作状态检测方法及装置”,包括以下步骤:s1:构建工作状态等级标准,获得各工作指标对应的工作指标状态等级标准;s2:采集所述移动焊接机器人系统在设定时段内各工作指标的实测数据,并对实测数据进行正向化处理;s3:获取各工作指标的综合权重;s4:将所述工作指标状态等级标准及所述实测数据均分别转化为对应的评价标准云和评价云;s5:基于所述综合权重分别对评价标准云和评价云进行云聚合,获得综合评价标准云和综合评价云;s6:计算所述综合评价标准云和综合评价云的相关性,将最大相关性对应的等级作为系统工作状态等级。与现有技术相比,本发明具有可靠性高、方便实时等优点。
技术实现要素:
5.为解决现有技术中存在的不足,本发明的目的在于,提供一种电缆隧道巡检机器人状态检测方法及装置,。
6.本发明采用如下的技术方案。
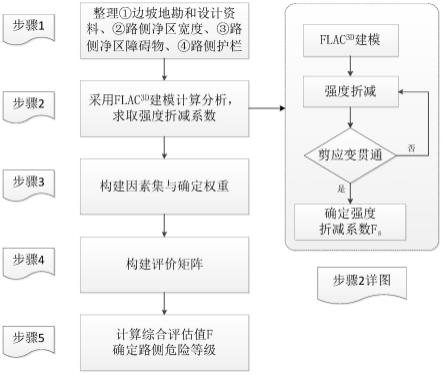
7.本发明一方面提出一种电缆隧道巡检机器人状态检测方法,该方法包括:
8.步骤1,采集电缆隧道巡检机器人的历史作业数据并建立状态指标体系,状态指标体系包括因素集和综合评语集;
9.步骤2,采集并正向化电缆隧道巡检机器人的巡检作业数据;
10.步骤3,利用层次分析法和熵权法获得正向化后的巡检作业数据的主观权重和客观权重,利用主观权重和客观权重得到综合权重;基于relief算法根据正向化后的巡检作业数据与状态指标的相关性对综合权重进行更新和移除操作,以操作后的巡检作业数据及综合权重构建因素集权向量;
11.步骤4,建立因素集对综合评语集的隶属度函数;基于隶属度函数进行模糊综合评价得到模糊评价矩阵;通过因素集权向量与模糊评价矩阵的合成计算建立状态检测模型;
12.步骤5,对状态检测模型的输出结果进行专家打分,得到状态检测综合评价结果。
13.优选地,步骤1包括:
14.步骤1.1,采集电缆隧道巡检机器人的历史作业数据,历史作业数据包括:导航定位作业数据,行走通过作业数据,检测作业数据,数据分析作业数据;
15.其中,导航定位作业数据包括:路径规划作业数据、重复定位作业数据、地图构建作业数据、电源管理作业数据;
16.行走通过作业数据包括:越障作业数据、涉水作业数据、穿越防火门作业数据、平均移动速度;
17.检测作业数据包括:机械臂控制作业数据、目标识别作业数据、云台跟踪作业数据、设备检测作业数据、环境检测作业数据;
18.数据分析作业数据包括:缺陷识别作业数据、数据通信作业数据、异常报警作业数据、自主学习作业数据;
19.步骤1.2,基于导航定位作业数据,建立电缆隧道巡检机器人的导航定位能力指标u1,导航定位能力指标包括路径规划能力指标u
11
、重复定位能力指标u
12
、地图构建能力指标u
13
、电源管理能力指标u
14
;
20.基于行走通过作业数据,建立电缆隧道巡检机器人的行走通过能力指标u2,行走通过能力指标包括:越障能力指标u
21
、涉水能力指标u
22
、穿越防火门能力指标u
23
、平均移动速度u
24
;
21.基于检测作业数据,建立电缆隧道巡检机器人的检测能力指标u3,检测能力指标包括:机械臂控制能力指标u
31
、目标识别能力指标u
32
、云台跟踪能力指标u
33
、设备检测能力指标u
34
、环境检测能力指标u
35
;
22.基于数据分析作业数据,建立电缆隧道巡检机器人的数据分析能力指标u4,数据分析能力指标包括:缺陷识别能力指标u
41
、数据通信能力指标u
42
、异常报警能力指标u
43
、自主学习能力指标u
44
;
23.步骤1.3,由导航定位能力指标u1、行走通过能力指标u2、检测能力指标u3和数据分析能力指标u4构成电缆隧道巡检机器人的状态指标体系中的因素集u,满足如下关系式:
24.u=(u1,u2,u3,u4)
25.再分别以导航定位能力指标u1、行走通过能力指标u2、检测能力指标u3和数据分析能力指标u4中包括的各能力指标,构成因素集u中的各向量元素ui,满足如下关系式:
26.ui=(u
i1
,u
i2
,
…
,u
ij
)
27.式中,
28.i为因素集u中的向量元素的编号,i=1,2,3,4;
29.j为向量元素中的能力指标的总数,j=1,2,
…
,m,m为整数;
30.步骤1.4,构建电缆隧道巡检机器人的状态指标体系中的综合评语集v,满足v=(v1,v2,v3),其中,v1,v2,v3分别表示优良分数区间、合格分数区间、不合格分数区间。
31.优选地,步骤2中,状态指标包括正向指标、逆向指标和适度指标;对巡检作业数据进行正向化处理包括:归属于逆向指标的巡检作业数据和归属于适度指标的巡检作业数据均转化为归属于正向指标的巡检作业数据;
32.其中,归属于逆向指标的巡检作业数据的正向化处理,满足如下关系式:
[0033][0034]
式中,
[0035]
x
′
p
为归属于逆向指标的第p个巡检作业数据的正向化值,
[0036]
x
max
为逆向指标的上限值,
[0037]
x
min
为逆向指标的下限值,
[0038]
x
p
为归属于逆向指标的第p个巡检作业数据值;
[0039]
归属于适度指标的巡检作业数据的正向化处理,满足如下关系式:
[0040][0041]
式中,
[0042]
x
′q为归属于适度指标的第q个巡检作业数据的正向化值,
[0043]
xe为适度指标的临界阈值或额定值,
[0044]
xq为归属于适度指标的第q个巡检作业数据值。
[0045]
优选地,步骤2中所述巡检作业数据,包括移动类巡检作业数据和检测类巡检作业数据;
[0046]
将来自于电缆隧道巡检机器人工作状态监测传感器的移动类巡检作业数据,与电缆隧道巡检机器人的出厂技术参数进行对比后,再进行正向化处理;
[0047]
将来自于电缆隧道巡检机器人搭载的检测和/或监测装置的检测类巡检作业数据,与来自于隧道内安装的在线监测装置的监测数据进行对比后,再进行正向化处理。
[0048]
优选地,步骤3包括:
[0049]
步骤3.1,基于层次分析法,由专家利用“1-9”标度法对各层因素集之间的标度进行评判,得到判断矩阵;
[0050]
步骤3.2,对判断矩阵中各元素的比例标度进行标准差计算,对标准差超过1的比例标度判定为不合格标度,并删除判断矩阵中对应的元素;对判断矩阵进行一致性检验,利用计算得到的判断矩阵一致性比例指标确定判断矩阵的一致性;利用通过一致性检验的判断矩阵计算正向化后的巡检作业数据的主观权重;
[0051]
步骤3.3,计算正向化处理后的巡检作业数据的熵值,利用熵值计算得到正向化后的巡检作业数据的客观权重;
[0052]
步骤3.4,利用主观权重和客观权重进行综合赋权运算,以如下关系式计算得到综合权重:
[0053][0054]
式中,wk(d
ij
)为正向化后的巡检作业数据d
ij
的综合权重,w
ahp
(d
ij
)为正向化后的巡检作业数据d
ij
的主观权重,we(d
ij
)为正向化后的巡检作业数据d
ij
的客观权重。
[0055]
优选地,步骤3还包括:
[0056]
步骤3.5,对于任一正向化后的巡检作业数据d
ij
,选择正向化后的巡检作业数据d
ij
的同类巡检作业数据h以及不同类巡检作业数据m;其中,同类巡检作业数据h与正向化后的巡检作业数据d
ij
归属于相同状态指标,不同类巡检作业数据m与正向化后的巡检作业数据d
ij
归属于不同状态指标;
[0057]
步骤3.6,以正向化后的巡检作业数据d
ij
对应的理想巡检作业数据为特征s,分别计算正向化后的巡检作业数据d
ij
与同类巡检作业数据h在特征s上的距离disth、正向化后的巡检作业数据d
ij
与不同类巡检作业数据m在特征s上的距离distm;
[0058]
步骤3.7,以如下关系式对综合权重进行更新:
[0059][0060]
式中,w
′k为第k个正向化后的巡检作业数据的更新后的综合权重,wk为第k个正向化后的巡检作业数据的综合权重,为归一化处理后的正向化后的巡检作业数据d
ij
与同类巡检作业数据h在特征s上的距离,为归一化处理后的正向化后的巡检作业数据d
ij
与不同类巡检作业数据m在特征s上的距离;
[0061]
步骤3.8,对于更新后的综合权重小于设定阈值的正向化后的巡检作业数据,进行移除操作;以移除操作后剩余的正向化后的巡检作业数据及其对应的更新后的综合权重构建因素集权向量w。
[0062]
优选地,步骤3.6中,理想巡检作业数据与正向化后的巡检作业数据d
ij
归属于相同状态指标,并且理想巡检作业数据使得专家对该项状态指标的打分为满分;
[0063]
步骤3.8中,设定阈值取值为0.5。
[0064]
优选地,步骤4包括:
[0065]
步骤4.1,建立因素集对综合评语集的隶属度函数μa,满足如下关系式:
[0066][0067]
式中,d为优良分数区间v1的上限值,c为优良分数区间v1的下限值,b为合格分数区间v2的下限值,a为不合格分数区间v3的下限值;
[0068]
步骤4.2,利用隶属度函数,从因素集u中最低层次的因素u
ij
开始,计算因素u
ij
对评语集中优良分数区间v1、合格分数区间v2和不合格分数区间v3的隶属度向量{r
ij1
,r
ij2
,r
ij3
};利用各隶属度向量{r
ij1
,r
ij2
,r
ij3
}得到模糊综合评价矩阵r
m*n
;
[0069]
步骤4.3,利用综合评价合成算子,将因素集权向量w
1*m
与模糊综合评价矩阵r
m*n
进
行合成,得到电缆隧道巡检机器人的状态检测模型;状态检测模型的输出结果为模糊综合评价结果向量b
1*n
;其中综合评价合成算子包括矩阵乘法;
[0070]
优选地,步骤5中,以如下关系式确定状态检测综合评价结果f:
[0071][0072]
式中,b
1*n
为模糊综合评价结果向量,s
1*n
为综合评语集中各因素的专家打分。
[0073]
本发明另一方面还提出利用电缆隧道巡检机器人状态检测方法而构建的一种电缆隧道巡检机器人状态检测装置,该装置包括:存储器、处理器、无线通讯模块;所述存储器存储有计算机程序,处理器调用所述计算机程序执行权利要求1-9所述的各个步骤,并生成评价结果和巡检作业报告,通过无线通讯模块将评价结果和巡检作业报告上传至后台。
[0074]
本发明的有益效果包括:
[0075]
(1)本发明根据电缆隧道巡检机器人的出厂技术参数及实时采集的巡检作业数据,对电缆隧道巡检机器人系统的工作状态进行检测与诊断,从而实时评价电缆隧道巡检机器人的系统综合性能,为提高电缆隧道巡检机器人的系统综合性能提供技术依据;
[0076]
(2)本发明对电缆隧道巡检机器人的移动类巡检作业数据和检测类巡检作业数据均进行正向化处理,解决了多种工作指标在定性判断和定量数值之间的无法合理转化的问题;
[0077]
(3)本发明中各项工作指标的综合权重为客观权重和主观权重的综合赋权运算结果,其中利用层次分析法获得主观权重、利用熵权法获得客观权重,并进行综合赋权运算得到综合权重;基于relief算法,根据巡检作业数据与状态指标的相关性,对综合权重进行更新,更新后的综合权重小于设定阈值的巡检作业数据将被移除;以移除操作后剩余的巡检作业数据及其对应的更新后的综合权重构建因素集权向量;从而使得评价结果更加科学、可靠、全面;
[0078]
(4)本发明能够根据电缆隧道巡检机器人每次巡检任务获得的巡检作业数据,进行实时的状态检测,并将检测结果随巡检作业结果一同上传至后台;当电缆隧道巡检机器人在电缆隧道内执行全自主巡检作业时,能够使运维人员实时地、清楚地了解电缆隧道巡检机器人执行巡检任务的准确性和有效性,对电缆隧道内设备及电缆隧道巡检机器人采取有针对性的运维策略,避免因电缆隧道巡检机器人的巡检作业数据不准确而导致的电缆检修工作的延误。
附图说明
[0079]
图1是本发明提出的一种电缆隧道巡检机器人状态检测方法的步骤框图。
具体实施方式
[0080]
下面结合附图对本技术作进一步描述。以下实施例仅用于更加清楚地说明本发明的技术方案,而不能以此来限制本技术的保护范围。
[0081]
本发明一方面提出一种电缆隧道巡检机器人状态检测方法,如图1所示,该方法包括:
[0082]
步骤1,采集电缆隧道巡检机器人的历史作业数据并建立状态指标体系,状态指标体系包括因素集和综合评语集。
[0083]
具体地,步骤1包括:
[0084]
步骤1.1,采集电缆隧道巡检机器人的历史作业数据,历史作业数据包括:导航定位作业数据,行走通过作业数据,检测作业数据,数据分析作业数据;
[0085]
其中,导航定位作业数据包括:路径规划作业数据、重复定位作业数据、地图构建作业数据、电源管理作业数据;
[0086]
行走通过作业数据包括:越障作业数据、涉水作业数据、穿越防火门作业数据、平均移动速度;
[0087]
检测作业数据包括:机械臂控制作业数据、目标识别作业数据、云台跟踪作业数据、设备检测作业数据、环境检测作业数据;
[0088]
数据分析作业数据包括:缺陷识别作业数据、数据通信作业数据、异常报警作业数据、自主学习作业数据。
[0089]
步骤1.2,基于导航定位作业数据,建立电缆隧道巡检机器人的导航定位能力指标u1,导航定位能力指标包括路径规划能力指标u
11
、重复定位能力指标u
12
、地图构建能力指标u
13
、电源管理能力指标u
14
;
[0090]
具体地,优选实施例中,基于导航定位作业数据,建立电缆隧道巡检机器人的导航定位能力指标,包括:
[0091]
在隧道内多段不同的平直水泥路面,控制电缆隧道巡检机器人在到达固定位置a后,向设定位置b进行移动,不同路面的移动过程中路段长度ab均相同;则电缆隧道巡检机器人的路径规划能力指标u
11
和重复定位能力指标u
12
分别满足如下关系式:
[0092]u11
=max(l
j-lc)
[0093][0094]
式中,lj为第j次从位置a移动到位置b后的累计行走路程,lc为位置a到位置b的最短距离;xc、yc分别为位置b的给定命令位置信息,分别为沿路段ab多次移动后得到的位置b的平均位置信息;
[0095]
根据电缆隧道巡检机器人出厂资料,按如下规则确定地图构建能力指标u
13
:地图构建精度小于40mm得分100分,地图构建精度为大于等于40mm且小于100mm得分50分,地图构建精度超过100mm或不具备地图构建能力得分为0分;
[0096]
根据电缆隧道巡检机器人出厂资料,按如下规则确定电源管理能力指标u
14
:具备电池管理系统且连续运行时间≥6h得分100分,具备电池管理系统且连续运行时间≥4h得分60分,不具备电池管理系统或不具备自主充电功能得分为0分。
[0097]
可选地,对于具备全自主巡检能力的履带式巡检机器人,停靠定位精度优于
±
15mm,连续运行时间≥4h,动力电池系统容量约为65v/50ah,电池管理系统包括电池过充、过放、过流、短路保护、报警及通讯功能,配置无线充电系统,无线充电系统充电距离≥50mm。
[0098]
基于行走通过作业数据,建立电缆隧道巡检机器人的行走通过能力指标u2,行走通过能力指标包括:越障能力指标u
21
、涉水能力指标u
22
、穿越防火门能力指标u
23
、平均移动速度u
24
;
[0099]
具体地,优选实施例中,基于行走通过作业数据,建立电缆隧道巡检机器人的行走
通过能力指标,包括:
[0100]
根据电缆隧道巡检机器人出厂资料,按如下规则确定越障能力指标u
21
:采用履带式移动机构设计得分100分,采用轮式移动机构设计得分50分,不具备越障能力得分为0分;
[0101]
根据电缆隧道巡检机器人出厂资料,按如下规则确定涉水能力指标u
22
:涉水深度达到300mm得分100分,涉水深度达到200mm得分60分,涉水深度达到100mm得分30分,不具备涉水能力得分为0分;
[0102]
根据电缆隧道巡检机器人出厂资料,按如下规则确定穿越防火门能力指标u
23
:具备防火门联动功能得分100分,不具备该项功能得分为0分;
[0103]
在隧道内多段不同的平直水泥路面,控制电缆隧道巡检机器人在到达固定位置a后,向设定位置b进行移动,不同路面的移动过程中路段长度ab均相同;计算电缆隧道巡检机器人沿路段ab多次移动后的平均移动速度。
[0104]
可选地,对于履带式巡检机器人,最大涉水深度≥300mm,最大运行速度≥2m/s,能够自主穿越隧道防火门。
[0105]
基于检测作业数据,建立电缆隧道巡检机器人的检测能力指标u3,检测能力指标包括:机械臂控制能力指标u
31
、目标识别能力指标u
32
、云台跟踪能力指标u
33
、设备检测能力指标u
34
、环境检测能力指标u
35
;
[0106]
具体地,优选实施例中,基于检测作业数据,建立电缆隧道巡检机器人的检测能力指标,包括:
[0107]
机械臂控制能力指标u
31
采用扣分制,满分100分;控制机器人在隧道内多个不同电缆接头处开展检测作业,电缆隧道巡检机器人停靠后,机械臂成功完成检测作业不扣分,电缆隧道巡检机器人搭载的目标识别装置发现一次碰撞即为检测失败,每次检测失败扣3分;
[0108]
根据电缆隧道巡检机器人出厂资料,按如下规则确定目标识别能力指标u
32
:具备目标识别功能得分100分,不具备目标识别功能得分为0分;
[0109]
根据电缆隧道巡检机器人出厂资料,按如下规则确定云台跟踪能力指标u
33
:具备云台功能得分100分,不具备云台功能得分为0分;
[0110]
将巡检作业完成后获得的设备检测结果与电缆本体上安装的状态在线监测装置的监测数据进行对比,以设备检测结果的准确度作为设备检测能力指标u
34
;
[0111]
将巡检作业完成后获得的环境监测结果与电缆隧道内安装的环境在线监测装置的监测数据进行对比,以环境监测结果的准确度作为环境检测能力指标u
35
。
[0112]
可选地,对于履带式巡检机器人,检测机械臂具备大臂水平回转、大臂俯仰、小臂俯仰、腕折、腕回转等5个自由度,重复定位精度约2mm,设备检测功能涵盖可见光、红外、局放检测、接地电流检测,环境监测功能涵盖烟雾、有害气体、空气含氧量、环境温湿度、水位,具备能够发现起火点并自动灭火的功能。
[0113]
基于数据分析作业数据,建立电缆隧道巡检机器人的数据分析能力指标u4,数据分析能力指标包括:缺陷识别能力指标u
41
、数据通信能力指标u
42
、异常报警能力指标u
43
、自主学习能力指标u
44
;
[0114]
具体地,优选实施例中,基于数据分析作业数据,建立电缆隧道巡检机器人的数据分析能力指标,包括:
[0115]
将电缆隧道巡检机器人通过设备检测装置、环境监测装置以及目标识别装置发现
的电缆巡检缺陷,与通过人工巡检、在线监测装置和视频监控装置发现的电缆缺陷进行对比,以电缆巡检缺陷的识别率作为缺陷识别能力指标u
41
;
[0116]
根据电缆隧道巡检机器人出厂资料,电缆隧道巡检机器人巡检作业完成后,通过无线ap上传检测数据和图谱以及本次巡检作业的状态检测评价报告,按如下规则确定数据通信能力指标u
42
:具备完整通信功能得分100分,不具备通信功能得分为0分;
[0117]
根据电缆隧道巡检机器人出厂资料,按如下规则确定异常报警能力指标u
43
:具备异常报警功能得分100分,不具备异常报警功能得分为0分;
[0118]
根据电缆隧道巡检机器人出厂资料,按如下规则确定自主学习能力指标u
44
:具备自主学习能力得分100分,不具备自主学习能力得分为0分。
[0119]
可选地,对于履带式巡检机器人,电缆缺陷识别率≥98%,具备数据无线上传功能以及基于机器学习的电缆隧道缺陷识别功能。
[0120]
步骤1.3,由导航定位能力指标u1、行走通过能力指标u2、检测能力指标u3和数据分析能力指标u4构成电缆隧道巡检机器人的状态指标体系中的因素集u,满足如下关系式:
[0121]
u=(u1,u2,u3,u4)
[0122]
具体地,因素集是以影响评价对象的各种因素为元素所组成的一个普通集合,其中元素ui代表影响评价对象的第i个因素,这些因素通常都具有不同程度的模糊性,本优选实施例中,使用因素集u作为检测电缆隧道巡检机器人的作业效能等级的指标集。
[0123]
再分别以导航定位能力指标u1、行走通过能力指标u2、检测能力指标u3和数据分析能力指标u4中包括的各能力指标,构成因素集u中的各向量元素ui,满足如下关系式:
[0124]
ui=(u
i1
,u
i2
,
…
,u
ij
)
[0125]
式中,
[0126]
i为因素集u中的向量元素的编号,i=1,2,3,4;
[0127]
j为向量元素中的能力指标的总数,j=1,2,
…
,m,m为整数。
[0128]
因此,因素集u中的各元素u
ij
就是电缆隧道巡检机器人的各项具体的状态指标。
[0129]
步骤1.4,构建电缆隧道巡检机器人的状态指标体系中的综合评语集v,满足v=(v1,v2,v3),其中,v1,v2,v3分别表示优良分数区间、合格分数区间、不合格分数区间。
[0130]
一般,步骤1在电缆隧道巡检机器人进行巡检作业前实施。
[0131]
步骤2,采集并正向化电缆隧道巡检机器人的巡检作业数据。
[0132]
具体地,步骤2中,状态指标包括正向指标、逆向指标和适度指标;对巡检作业数据进行正向化处理包括:归属于逆向指标的巡检作业数据和归属于适度指标的巡检作业数据均转化为归属于正向指标的巡检作业数据。
[0133]
具体来说,在电缆隧道巡检机器人的多指标综合评价过程中,有些状态指标是正向指标,即指标对应的实测数据值越大评价越好;而有些是逆向指标,即指标对应的实测数据值越小评价越好;还有些是适度指标,即指标对应的实测数据值越接近某个值越好。为此,本发明中,在获得电缆隧道巡检机器人的巡检作业数据后,首先将巡检作业数据同趋势化,即将归属于逆向指标的巡检作业数据和归属于适度指标的巡检作业数据均转化为归属于正向指标的巡检作业数据,使得指标对应的实测数据值越小性能越好的指标和指标对应的实测数据值越接近一个中间数性能越好的指标均转变为指标对应的实测数据值越大代表性能越好。
[0134]
其中,归属于逆向指标的巡检作业数据的正向化处理,满足如下关系式:
[0135][0136]
式中,
[0137]
x
′
p
为归属于逆向指标的第p个巡检作业数据的正向化值,
[0138]
x
max
为逆向指标的上限值,
[0139]
x
min
为逆向指标的下限值,
[0140]
x
p
为归属于逆向指标的第p个巡检作业数据值;
[0141]
归属于适度指标的巡检作业数据的正向化处理,满足如下关系式:
[0142][0143]
式中,
[0144]
x
′q为归属于适度指标的第q个巡检作业数据的正向化值,
[0145]
xe为适度指标的临界阈值或额定值,
[0146]
xq为归属于适度指标的第q个巡检作业数据值。
[0147]
具体地,步骤2中所述巡检作业数据,包括移动类巡检作业数据和检测类巡检作业数据;
[0148]
将来自于电缆隧道巡检机器人工作状态监测传感器的移动类巡检作业数据,与电缆隧道巡检机器人的出厂技术参数进行对比后,再进行正向化处理;移动类巡检作业数据包括但不限于:移动速度、移动距离、巡检时间、电池余量、碰撞记录。
[0149]
将来自于电缆隧道巡检机器人搭载的检测和/或监测装置的检测类巡检作业数据,与来自于隧道内安装的在线监测装置的监测数据进行对比后,再进行正向化处理;检测类巡检作业数据包括但不限于:针对与电缆本体的高频局部放电在线监测、接地电流在线监测和分布式光纤测温在线监测,以及针对电缆隧道环境的有害气体含量监测、空气含氧量监测、环境温湿度监测和隧道水位监测。
[0150]
一般,步骤1在电缆隧道巡检机器人进行巡检作业中实施。
[0151]
步骤3,利用层次分析法和熵权法获得正向化后的巡检作业数据的主观权重和客观权重,利用主观权重和客观权重得到综合权重;基于relief算法根据正向化后的巡检作业数据与状态指标的相关性对综合权重进行更新和移除操作,以操作后的巡检作业数据及综合权重构建因素集权向量。
[0152]
具体地,步骤3包括:
[0153]
步骤3.1,基于层次分析法,由专家利用“1-9”标度法对各层因素集之间的标度进行评判,得到判断矩阵。
[0154]
步骤3.2,对判断矩阵中各元素的比例标度进行标准差计算,对标准差超过1的比例标度判定为不合格标度,并删除判断矩阵中对应的元素;对判断矩阵进行一致性检验,利用计算得到的判断矩阵一致性比例指标确定判断矩阵的一致性;利用通过一致性检验的判断矩阵计算正向化后的巡检作业数据的主观权重。
[0155]
针对专家评判的差异性,为避免极端意见的出现,利用判断矩阵中元素的比例标
度计算标准差,对标准差超过1的比例标度判定为不合格标度,删除极端意见。通过一致性比例指标确认判断矩阵的一致性是否可以被接受。这样既保持了原始数据的客观性,又考虑了其他专家的意见,使得权重更加全面。
[0156]
步骤3.3,计算正向化处理后的巡检作业数据的熵值,利用熵值计算得到正向化后的巡检作业数据的客观权重。
[0157]
在有巡检作业数据时,可以通过熵权法确定客观权重,由于熵权法对数据量要求少且容易计算,因此在综合评价研究中是一种备受欢迎的权重计算方法。熵权法的权值计算准则是根据各巡检作业数据之间的数值离散程度而确定的,可以有效地消除人为干扰因素,使研究结果更加合理、公平。本优选实施例中,具体过程如下:
[0158]
(1)构造正向化后的巡检作业数据矩阵data=(d
ij
)
4*m
,式中d
ij
表示因素集u中的各元素u
ij
对应的正向化后的巡检作业数据;
[0159]
(2)计算正向化后的巡检作业数据的熵值
[0160]
(3)计算正向化后的巡检作业数据的权重
[0161]
(4)计算正向化后的巡检作业数据的客观权重
[0162]
步骤3.4,利用主观权重和客观权重进行综合赋权运算,以如下关系式计算得到综合权重:
[0163][0164]
式中,wk(d
ij
)为正向化后的巡检作业数据d
ij
的综合权重,w
ahp
(d
ij
)为正向化后的巡检作业数据d
ij
的主观权重,we(d
ij
)为正向化后的巡检作业数据d
ij
的客观权重。
[0165]
将主观评价法和客观评价法结合可以得到更加科学可靠的综合权重。
[0166]
具体地,步骤3还包括:
[0167]
步骤3.5,对于任一正向化后的巡检作业数据d
ij
,选择正向化后的巡检作业数据d
ij
的同类巡检作业数据h以及不同类巡检作业数据m;其中,同类巡检作业数据h与正向化后的巡检作业数据d
ij
归属于相同状态指标,不同类巡检作业数据m与正向化后的巡检作业数据d
ij
归属于不同状态指标;
[0168]
步骤3.6,以正向化后的巡检作业数据d
ij
对应的理想巡检作业数据为特征s,分别计算正向化后的巡检作业数据d
ij
与同类巡检作业数据h在特征s上的距离disth、正向化后的巡检作业数据d
ij
与不同类巡检作业数据m在特征s上的距离distm;
[0169]
具体地,步骤3.6中,理想巡检作业数据与正向化后的巡检作业数据d
ij
归属于相同状态指标,并且理想巡检作业数据使得专家对该项状态指标的打分为满分;
[0170]
步骤3.7,以如下关系式对综合权重进行更新:
[0171][0172]
式中,w
′k为第k个正向化后的巡检作业数据的更新后的综合权重,wk为第k个正向化后的巡检作业数据的综合权重,为归一化处理后的正向化后的巡检作业数据d
ij
与
同类巡检作业数据h在特征s上的距离,为归一化处理后的正向化后的巡检作业数据d
ij
与不同类巡检作业数据m在特征s上的距离;
[0173]
步骤3.8,对于更新后的综合权重小于设定阈值的正向化后的巡检作业数据,进行移除操作;以移除操作后剩余的正向化后的巡检作业数据及其对应的更新后的综合权重构建因素集权向量w。
[0174]
具体地,步骤3.8中,设定阈值取值为0.5;值得注意的是,设定阈值取值为0.5是一种非限制性的较优选择。
[0175]
步骤4,建立因素集对综合评语集的隶属度函数;基于隶属度函数进行模糊综合评价得到模糊评价矩阵;通过因素集权向量与模糊评价矩阵的合成计算建立状态检测模型。
[0176]
具体地,步骤4包括:
[0177]
步骤4.1,建立因素集对综合评语集的隶属度函数μa,满足如下关系式:
[0178][0179]
式中,d为优良分数区间v1的上限值,c为优良分数区间v1的下限值,b为合格分数区间v2的下限值,a为不合格分数区间v3的下限值;本优选实施例中,隶属函数采用梯形分布函数进行构造。
[0180]
在优选实施例中,电缆隧道巡检机器人的状态指标体系中的综合评语集v=(v1,v2,v3),其中,v1,v2,v3分别表示优良分数区间、合格分数区间、不合格分数区间,以综合评语集来表示电缆隧道巡检机器人开展巡检作业的正确性和有益性效果;其中:v1表示的优良分数区间为[85,100],v2表示的合格分数区间为[60,85),v3表示的不合格分数区间为[0,60)。因此,本发明中隶属度函数可表示为如下关系式:
[0181][0182][0183][0184]
式中,μ
i1
表示因素集对优良分数区间v1的隶属度函数,μ
i2
表示因素集对优良分数区间v1和合格分数区间v2的隶属度函数,表示因素集对合格分数区间v2和不合格分数区
间v3的隶属度函数。
[0185]
步骤4.2,利用隶属度函数,从因素集u中最低层次的因素u
ij
开始,计算因素u
ij
对评语集中优良分数区间v1、合格分数区间v2和不合格分数区间v3的隶属度向量{r
ij1
,r
ij2
,r
ij3
};利用各隶属度向量{r
ij1
,r
ij2
,r
ij3
}得到模糊综合评价矩阵r
m*n
;
[0186]
在本优选实施例中,电缆隧道巡检机器人的状态检测属于一种多因素多层次系统的多级模糊综合评价,所使用的多级模糊综合评价方法包括:先按最低层次的各因素进行模糊综合评价,然后再按上一层次的各因素进行模糊综合评价,以此类推向,直到最高层次的各因素进行模糊综合评价,此时得到的就是模糊综合评价结果,即模糊综合评价矩阵。
[0187]
步骤4.3,利用综合评价合成算子,将因素集权向量w
1*m
与模糊综合评价矩阵r
m*n
进行合成,得到电缆隧道巡检机器人的状态检测模型;状态检测模型的输出结果为模糊综合评价结果向量b
1*n
;其中综合评价合成算子包括矩阵乘法。
[0188]
步骤5,对状态检测模型的输出结果进行专家打分,得到状态检测综合评价结果。
[0189]
具体地,步骤5中,以如下关系式确定状态检测综合评价结果f:
[0190][0191]
式中,b
1*n
为模糊综合评价结果向量,s
1*n
为综合评语集中各因素的专家打分。
[0192]
本优选实施例中,电缆隧道巡检机器人的状态检测是多目标的模糊综合评价,对于同一批专家打分,状态检测综合评价结果可信,各电缆隧道巡检机器人的状态检测综合评价结果可以进行相互比较。
[0193]
本发明另一方面还提出利用电缆隧道巡检机器人状态检测方法而构建的一种电缆隧道巡检机器人状态检测装置,该装置包括:存储器、处理器、无线通讯模块;所述存储器存储有计算机程序,处理器调用所述计算机程序执行权利要求1-9所述的各个步骤,并生成评价结果和巡检作业报告,通过无线通讯模块将评价结果和巡检作业报告上传至后台。
[0194]
本发明申请人结合说明书附图对本发明的实施示例做了详细的说明与描述,但是本领域技术人员应该理解,以上实施示例仅为本发明的优选实施方案,详尽的说明只是为了帮助读者更好地理解本发明精神,而并非对本发明保护范围的限制,相反,任何基于本发明的发明精神所作的任何改进或修饰都应当落在本发明的保护范围之内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。