1.本发明涉及城市规划技术领域,尤其涉及一种基于城市三维空间形态的对景特征数据化处理方法及系统。
背景技术:
2.对景作为特殊的视觉焦点和远景
1.,其本质是在视野中构造一个视觉焦点,对视觉感受的空间层次有着积极的影响,是对空间复杂性和丰富性的直接判断。在高品质化的城镇空间建设中,对景是城市重要的视觉美学景观的重要组成部分,其多产生于视野场景中因为轴线组织而营造的视觉焦点。对景特征可以客观反映人与景的互动以及景与景之间的联系,亦是城市形态空间结构的在视觉感知层面的直接反馈,因此对景特征的数据化处理是城市规划建设部门对城市空间评估和优化的重要内容。将对景特征的数据化处理结果作为指标有助于城市规划设计决策,同时也可以作为城市空间布局控制与优化的重要依据。
3.现有的对景特征研究多依托于园林语境中的定性研究
2.,多以拍照与绘图观测评估分析
[3][4]
,这些方法以主观的定性评价为导向,且因为观察点不能均匀分布、拍摄参数不定以及需要大量的人工测量等,缺乏科学性、普适性与可重复性。除此之外,仅依靠有限个视点的定性分析研究精度较低,难以对一个城市片区内的对景特征进行完整的数据化处理,无法为城市空间评估和优化提供精准的数据支持。这些方法的局限性主要源于两方面的原因:一是在数据采集方面,仅依靠人工测量获取数据导致视点选择过于主观,难以覆盖城市范围内绝大部分的有效视点;二是在量化评估方面,缺乏对于复杂空间的精确表达,且评价较为主观,较难得到定量的、精确的结论,由此使其应用范围受到极大的限制。
[0004]
因此,在强调以人为本的高品质城市空间规划中,基于城市三维空间形态的对景特征数据化处理方法及系统既是学术界一个亟待解决的难题,也是城市规划实践领域的紧迫需求。
[0005]
参考文献:
[0006]
[1]cullen g.concise townscape[m].boston:architectural press,1961.
[0007]
[2]韩乐乐.对景理法在城市景观设计中的应用研究[d].济南:山东建筑大学,2018.
[0008]
[3]王玫.空间往复与对景设计[d].天津:天津大学,2018.
[0009]
[4]魏保枝.传统造景手法在现代园林中应用的研究[d].福州:福建农林大学,2011.
技术实现要素:
[0010]
发明目的:针对上述现有技术的不足,本发明提供一种基于城市三维空间形态的对景特征数据化处理方法及系统,所述方法基于城市三维空间形态模型与矢量数据,通过
对既定的城市范围内所有有效视点的真实视野进行信息表征,分别计算实时场景中各视点对景的体量特征和高度特征;进而实现一个城市片区内对景特征的数据化处理,为城市空间布局控制与优化提供决策依据和科学支撑。
[0011]
技术方案:本发明提供的一种基于城市三维空间形态的对景特征数据化处理方法及系统,具体包括如下步骤:
[0012]
步骤1,采集城市现状的三维空间形态基础信息,建立城市空间形态的数据库场景,具体如下:
[0013]
步骤1.1,根据开源数据信息采集城市基础地理信息数据,构建城市数字地形模型,以及城市建筑模型多面体图层,导入地理信息系统软件arcgis,并统一各图层坐标系;
[0014]
步骤1.2,对城市数字地形模型中设定的观测区域表面整体栅格化,选取每个栅格的几何中心点作为代表该栅格的视点,并创建三维点要素,形成连续三维视点集合op{(loni,lati,hi),i∈n};其中loni,lati表示第i个视点的坐标值,hi为该视点高度,n为视点个数。
[0015]
步骤1.3,针对三维视点集合op{(loni,lati,hi),i∈n}中的视点p,根据视线方向sd,确定视点p的视野范围[az
l
,azu],方法如下所示,
[0016]
az
l
=sd-l
view
/2,azu=sd l
view
/2,其中az
l
表示视野范围下边界,azu表示视野范围上边界,l
view
为视野宽度,通常认定为120
°
。
[0017]
步骤2,获取视野中建筑轮廓的矢量数据,并提取对景信息,具体如下:
[0018]
步骤2.1,针对视点p,通过arcgis中天际线skyline与天际线图skyline graph工具生成视点p到轮廓线要素中每一个折点的方位角x和垂直角y的矢量数据;
[0019]
步骤2.2,根据视野范围[az
l
,azu]提取该视点处视野范围内建筑轮廓信息,形成矢量数据集d{(xi,yi)},以方位角为横轴,垂直角为纵轴,在二维视野面中生成视野中建筑轮廓;
[0020]
步骤2.3,根据黄金分割比例,确定对景框范围。设定视野范围横坐标38.2%至61.8%的空间范围为对景框区域[of
l
,ofu]。对景框上下边界of
l
,ofu通过下式获取of
l
=az
l
(az
u-az
l
)*0.382,ofu=az
l
(az
u-az
l
)*0.618;
[0021]
步骤2.4,进一步提取矢量数据集d{(xi,yi)}中在对景框区域内的矢量数据点信息,构成对景建筑轮廓矢量数据集do{(x
′j,y
′j)}。若数据集为空,即则代表对景框中不存在对景建筑,对景特征数据化处理结果为0。
[0022]
步骤3,对景体量特征数据化处理。对景体量特征vs反映对景框中建筑体量在视野中的相对凸显程度,具体方法为计算对景框中建筑面积so与视野中建筑面积sb的比值,如下所示:
[0023]vs
=so/sb;
[0024]
通过下式获得视野中建筑面积sb,
[0025][0026]
其中xi,yi表示该视点视野范围内建筑轮廓信息矢量数据集d{(xi,yi)}中对应的点坐标信息。视野中建筑面积表示为相邻点(xi,yi),(x
i 1
,y
i 1
)与x轴构成的各梯形面积的
总和。通过下式获得对景框中建筑面积so,
[0027][0028]
其中x
′j,y
′j表示该视点对景建筑轮廓矢量数据集do{(x
′j,y
′j)}中对应的点坐标信息。对景框中建筑面积表示为相邻点(x
′j,y
′j),(x
′
j 1
,y
′
j 1
)与x轴构成的各梯形面积的总和。
[0029]
步骤4,对景高度特征数据化处理,高度特征反映对景框中建筑高度在视野中的相对凸显程度。综合对景框中建筑轮廓信息,若对景框中存在整个视野中最高点建筑,则对景高度特征vh数据化处理为:
[0030]vh
=(h
of-h
ss
)/l
view
,
[0031]
其中h
of
=max{yi∈do}表示对景框中最高建筑轮廓矢量点数据的高度值,h
ss
=max{yn∈(d-do)}表示除对景框建筑外,视野中最高建筑矢量点数据的高度值。l
view
则表示视野宽度。公式中高度值均指建筑物在视野中的投影高度,而非实际的建筑高度;
[0032]
若对景框中仅存在视野中次高点建筑,同时与最高点建筑在视野中横轴距离大于1/2的视野范围,则高度特征vh数据化处理为:
[0033]vh
=(h
os-h
sho
)/l
view
,
[0034]
其他h
os
表示视野中最高建筑矢量点数据的高度值,h
sho
表示除视野中最高建筑外的次高建筑矢量点数据高度值;其他情况认为对景建筑高度不显著,vh值为0。
[0035]
步骤5,输出对景特征数据化处理结果,具体方法如下:
[0036]
步骤5.1,结合体量特征vs与高度特征vh,通过下式进行加权融合,获得对景特征数据化处理结果v,如下所示:
[0037]
v=α
·vs
(1-α)
·vh
,
[0038]
其中α表示两者信息要素之间的可调整权重关系;
[0039]
步骤5.2,判断是否完成全部视点处对景特征的数据化处理,如果否,则通过python软件编程循环重复步骤2,步骤3,步骤4,步骤5.1过程,对连续三维视点集合op中各视点依次进行处理,直至完成全部视点对景特征数据化处理,输出各视点对应的处理结果。
[0040]
此外,本发明还提出一种基于城市三维空间形态的对景特征数据化处理系统,包括环境模型构建模块、对景信息提取模块、对景体量特征数据化处理模块、对景高度特征数据化处理模块、对景特征数据化处理结果输出模块。系统各模块之间相互关联。环境模型构建模块生成城市三维空间形态场景和三维视点集合,并确定视点处的视野范围。对景信息提取模块基于城市三维空间形态场景、视点位置、视野范围,生成视点处视野范围内建筑轮廓矢量数据集,并根据对景框区域提取对景建筑轮廓矢量数据集。对景体量特征数据化处理模块基于矢量数据集,完成对景体量特征的数据化处理,获得对景体量特征信息。对景高度特征数据化处理模块根据对景框中建筑与视野中其他建筑的高度与位置关系,完成对景高度特征的数据化处理,获得对景高度特征信息。对景特征数据化处理结果输出模块融合对景体量特征与高度特征信息,完成全部视点的对景特征数据化处理,输出数据化处理结果信息。
[0041]
其中,环境模型构建模块用于导入城市数字地形模型、城市建筑模型多面体等城
市三维空间形态基础模型图层文件,并通过python调用arcpy库中arcpy.spatialreference接口统一各图层坐标系,进一步,对三维空间形态模型中设定的观测区域表面整体栅格化,通过栅格转点rastertopoint_conversion接口获取每个栅格几何中心点位置代表该栅格的视点,并通过arcpy.point接口创建点要素作为视点,并设定点要素位置,高度,视线方向sd等高度信息,生成三维视点集合op{(loni,lati,hi),i∈n},其中loni,lati表示第i个视点的坐标,hi为该视点高度,n为视点个数。进一步通过式子az
l
=sd-l
view
/2,azu=sd l
view
/2,确定视点的视野范围[az
l
,azu],其中az
l
、azu分别表示视野范围上下边界,l
view
为视野宽度。
[0042]
对景信息提取模块用于获得视点处城市建筑轮廓线,并根据视野范围与对景框区域提取生成对景建筑轮廓矢量数据集。模块首先基于三维视点集合op{(loni,lati,hi),i∈n}中一个视点p的位置信息,通过天际线skyline接口获取视点处城市建筑轮廓线要素,然后通过天际线图skyline graph工具生成视点p到轮廓线要素中每一个折点的矢量数据点。根据视点视野范围,提取该视点处视野范围内建筑轮廓信息,形成矢量数据集d{(xi,yi)}。进一步通过公式of
l
=az
l
(az
u-az
l
)*0.382,ofu=az
l
(az
u-az
l
)*0.618确定对景框区域[of
l
,ofu],其中of
l
,ofu表示对景框的上限与下限。根据对景框区域从矢量数据点集d{(xi,yi)}中提取获得对景框内建筑轮廓矢量数据集do{(x
′j,y
′j)};若数据集do为空,则对景框中不存在对景建筑,该视点处对景特征数据化结果v为0。
[0043]
对景体量特征数据化处理模块用于根据矢量数据计算视野平面中建筑面积和对景框中建筑面积,并完成数据化处理获得对景体量特征信息。模块首先根据式景框中建筑面积,并完成数据化处理获得对景体量特征信息。模块首先根据式代入矢量数据集d{(xi,yi)},获得视野中建筑面积sb。再根据式代入对景框内建筑轮廓矢量数据集do{(x
′j,y
′j)},获得对景框中建筑面积so。最后根据式vs=so/sb完成对景体量特征vs的数据化处理。
[0044]
对景高度特征数据化处理模块用于根据对景框中建筑与视野中其他建筑的高度与位置关系进行数据化处理,获得对景高度特征信息。模块首先提取对景框中最高建筑轮廓矢量点数据的高度值h
of
=max{yi∈do},若h
of
同样是整个视野中最高点建筑高度值时,进一步提取除对景框内建筑外,视野中最高建筑矢量数据点的高度值h
ss
=max{yn∈(d-do)},并通过vh=(h
of-h
ss
)/l
view
公式完成对景高度特征数据化处理,获得这种情况下对景高度特征信息vh。若对景框中最高h
of
仅为视野中次高点建筑,则提取最高点h
of
对应的横坐标值x
of
,进一步提取视野中最高建筑矢量数据点的高度值h
os
=max{yj∈d}及其对应的横坐标x
os
。若最高点建筑在视野中横轴距离大于1/2的视野范围,即满足则通过vh=(h
of-h
os
)/l
view
完成对景高度特征数据化处理,获得这种情况下对景高度特征信息vh。针对其他情况,认为对景建筑高度不显著,vh值为0。
[0045]
对景特征数据化处理结果输出模块用于完成全部视点对景特征数据化处理并输出结果信息。首先确定对景体量特征信息vs与高度特征信息vh之间的权重关系a,通过公式v=a
·vs
(1-a)
·vh
进行加权融合,获取视点处对景特征信息v。通过python编程对三维视点集合op中的每一个视点,重复处理过程,最终完成全部视点处对景特征的数据化处理并输
出对景特征信息。
[0046]
有益效果:相比与现有技术,本发明的有益效果为:1.本发明所述方法基于城市三维空间形态模型与矢量数据,克服了既有的方法在视点选择上的局限性。通过对既定的城市范围内所有有效视点的真实视野进行信息表征,分别计算实时场景中各视点对景的体量特征和高度特征;进而实现一个城市片区内的对景特征的数据化处理,为城市空间布局控制与优化提供决策依据和科学支撑。2.本发明所述方法具有科学性、普适性与可重复性,不仅可对城市现状进行评估分析,也可为不同规划方案的决策预判提供数据信息支持。
附图说明
[0047]
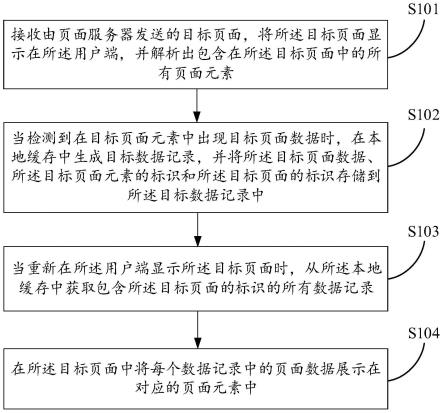
图1为本发明所述方法的技术流程图;
[0048]
图2为栅格化后的视点集合分布示意图;
[0049]
图3为设定的视点p的视野范围示意图;
[0050]
图4为视点p的视野中建筑轮廓的矢量数据获取过程示意图;
[0051]
图5为视点p的对景信息获取示意图。
具体实施方式
[0052]
下面结合附图和具体实施例,进一步阐明本发明。应理解下述实施例仅用于说明本发明而不用于限制本发明的范围。在阅读了本发明之后,本领域技术人员对本发明的各种等价形式的修改均落于本技术所附权利要求所限定的范围。
[0053]
以下结合附图和实施例对本发明的技术方法进行详细说明,本发明所述流程如图1所示,具体操作步骤如下:
[0054]
步骤1,采集城市现状的三维空间形态基础信息,建立城市空间形态的数据库场景,具体如下:
[0055]
步骤1.1,根据开源数据信息采集城市基础地理信息数据,构建城市数字地形模型,以及城市建筑模型多面体图层,导入地理信息系统软件arcgis,并统一各图层坐标系为wgs84。
[0056]
步骤1.2,步骤1.2,对城市数字地形模型中设定的观测区域表面整体栅格化,选取每个栅格的几何中心点作为代表该栅格的视点,并创建三维点要素,形成连续三维视点集合op{(loni,lati,hi),i∈n}(图2),其中loni,lati表示第i个视点的坐标值,hi为该视点高度,n为视点个数,实施例中,视点高度统一为1.7米,n为846。
[0057]
步骤1.3,针对三维视点集合op{(loni,lati,hi),i∈n}中的视点p,根据视线方向sd,确定视点p的视野范围[az
l
,azu](图3),方法如下所示,
[0058]
az
l
=sd-l
view
/2,azu=sd l
view
/2,其中az
l
表示视野范围下边界,azu表示视野范围上边界,l
view
为视野宽度,通常认定为120
°
。
[0059]
步骤2,获取视野中建筑轮廓的矢量数据,并提取对景信息,具体如下:
[0060]
步骤2.1,针对视点p,通过arcgis中天际线skyline与天际线图skyline graph工具生成视点p到轮廓线要素中每一个折点的方位角x和垂直角y的矢量数据(图4);
[0061]
步骤2.2,根据视野范围[az
l
,azu]提取该视点处视野范围内建筑轮廓信息,形成矢量数据集d{(xi,yi)},以方位角为横轴,垂直角为纵轴,在二维视野面中生成视野中建筑轮
廓;
[0062]
步骤2.3,根据黄金分割比例,确定对景框范围。设定视野范围横坐标38.2%至61.8%的空间范围为对景框区域[of
l
,ofu](图5)。对景框上下边界of
l
,ofu通过下式获取of
l
=az
l
(az
u-az
l
)*0.382,ofu=az
l
(az
u-az
l
)*0.618;
[0063]
步骤2.4,进一步提取矢量数据集d{(xi,yi)}中在对景框区域内的矢量数据点信息,构成对景建筑轮廓矢量数据集do{(x
′j,y
′j)}。若数据集为空,即则代表对景框中不存在对景建筑,对景特征数据化处理结果为0。
[0064]
步骤3,对景体量特征数据化处理。对景体量特征vs反映对景框中建筑体量在视野中的相对凸显程度,具体方法为计算对景框中建筑面积so与视野中建筑面积sb的比值,如下所示:
[0065]vs
=so/sb;
[0066]
通过下式获得视野中建筑面积sb,
[0067][0068]
其中xi,yi表示该视点视野范围内建筑轮廓信息矢量数据集d{(xi,yi)}中对应的点坐标信息。视野中建筑面积表示为相邻点(xi,yi),(x
i 1
,y
i 1
)与x轴构成的各梯形面积的总和。通过下式获得对景框中建筑面积so,
[0069][0070]
其中x
′j,y
′j表示该视点对景建筑轮廓矢量数据集do{(x
′j,y
′j)}中对应的点坐标信息。对景框中建筑面积表示为相邻点(x
′j,y
′j),(x
′
j 1
,y
′
j 1
)与x轴构成的各梯形面积的总和。
[0071]
步骤4,对景高度特征数据化处理,高度特征反映对景框中建筑高度在视野中的相对凸显程度。综合对景框中建筑轮廓信息,若对景框中存在整个视野中最高点建筑,则对景高度特征vh数据化处理为:
[0072]vh
=(h
of-h
ss
)/l
view
,
[0073]
其中h
of
=max{yi∈do}表示对景框中最高建筑轮廓矢量点数据的高度值,h
ss
=max{yn∈(d-do)}表示除对景框建筑外,视野中最高建筑矢量点数据的高度值。l
view
则表示视野宽度。公式中高度值均指建筑物在视野中的投影高度,而非实际的建筑高度;
[0074]
若对景框中仅存在视野中次高点建筑,同时与最高点建筑在视野中横轴距离大于1/2的视野范围,则高度特征vh数据化处理为:
[0075]vh
=(h
os-h
sho
)/l
view
,
[0076]
其他h
os
表示视野中最高建筑矢量点数据的高度值,h
sho
表示除视野中最高建筑外的次高建筑矢量点数据高度值;其他情况认为对景建筑高度不显著,vh值为0。
[0077]
步骤5.1,结合体量特征vs与高度特征vh,通过下式进行加权融合,获得对景特征数据化处理结果v,如下所示:
[0078]
v=α
·vs
(1-α)
·vh
,
[0079]
其中α表示两者信息要素之间的可调整权重关系;
[0080]
步骤5.2,判断是否完成全部视点处对景特征的数据化处理,如果否,则通过python软件编程循环重复步骤2,步骤3,步骤4,步骤5.1过程,对连续三维视点集合op中各视点依次进行处理,直至完成全部视点对景特征数据化处理,输出各视点对应的处理结果。
[0081]
本发明还提出一种基于城市三维空间形态的对景特征数据化处理系统,包括环境模型构建模块、对景信息提取模块、对景体量特征数据化处理模块、对景高度特征数据化处理模块、对景特征数据化处理结果输出模块。
[0082]
系统各模块之间相互关联。环境模型构建模块生成城市三维空间形态场景和三维视点集合,并确定视点处的视野范围。对景信息提取模块基于城市三维空间形态场景、视点位置、视野范围,生成视点处视野范围内建筑轮廓矢量数据集,并根据对景框区域提取对景建筑轮廓矢量数据集。对景体量特征数据化处理模块基于矢量数据集,完成对景体量特征的数据化处理,获得对景体量特征信息。对景高度特征数据化处理模块根据对景框中建筑与视野中其他建筑的高度与位置关系,完成对景高度特征的数据化处理,获得对景高度特征信息。对景特征数据化处理结果输出模块融合对景体量特征与高度特征信息,完成全部视点的对景特征数据化处理,输出数据化处理结果信息。
[0083]
其中,环境模型构建模块用于导入城市数字地形模型、城市建筑模型多面体等城市三维空间形态基础模型图层文件,并通过python调用arcpy库中arcpy.spatialreference接口统一各图层坐标系,进一步对三维空间形态模型中设定的观测区域表面整体栅格化,通过栅格转点rastertopoint_conversion接口获取每个栅格几何中心点位置代表该栅格的视点,并通过arcpy.point接口创建点要素作为视点,并设定点要素位置,高度,视线方向sd等高度信息,生成三维视点集合op{(loni,lati,hi),i∈n},其中loni,lati表示第i个视点的坐标,hi为该视点高度,n为视点个数。进一步通过式子az
l
=sd-l
view
/2,azu=sd l
view
/2,确定视点的视野范围[az
l
,azu],其中az
l
、azu分别表示视野范围上下边界,l
view
为视野宽度。
[0084]
对景信息提取模块用于获得视点处城市建筑轮廓线,并根据视野范围与对景框区域提取生成对景建筑轮廓矢量数据集。模块首先基于三维视点集合op{(loni,lati,hi),i∈n}中一个视点p的位置信息,通过天际线skyline接口获取视点处城市建筑轮廓线要素,然后通过天际线图skyline graph工具生成视点p到轮廓线要素中每一个折点的矢量数据点。根据视点视野范围,提取该视点处视野范围内建筑轮廓信息,形成矢量数据集d{(xi,yi)}。进一步通过公式ofi=azi (az
u-azi)*0.382,ofu=azi (az
u-azi)*0.618确定对景框区域[ofi,ofu],其中ofi,ofu表示对景框的上限与下限。根据对景框区域从矢量数据点集d{(xi,yi)}中提取获得对景框内建筑轮廓矢量数据集do{(x
′j,y
′j)};若数据集do为空,则对景框中不存在对景建筑,该视点处对景特征数据化结果v为0。
[0085]
对景体量特征数据化处理模块用于根据矢量数据计算视野平面中建筑面积和对景框中建筑面积,并完成数据化处理获得对景体量特征信息。模块首先根据式景框中建筑面积,并完成数据化处理获得对景体量特征信息。模块首先根据式代入矢量数据集d{(xi,yi)},获得视野中建筑面积sb。再根据式代入对景框内建筑轮廓矢量数据集do{(x
′j,y
′j)},获得对景框中建筑面积so。最后根据式vs=so/sb完成对景体量特征vs的数据
化处理。
[0086]
对景高度特征数据化处理模块用于根据对景框中建筑与视野中其他建筑的高度与位置关系进行数据化处理,获得对景高度特征信息。模块首先提取对景框中最高建筑轮廓矢量点数据的高度值h
of
=max{yi∈do},若h
of
同样是整个视野中最高点建筑高度值时,进一步提取除对景框内建筑外,视野中最高建筑矢量数据点的高度值h
ss
=max{yn∈(d-do)},并通过vh=(h
of-h
ss
)/l
view
公式完成对景高度特征数据化处理,获得这种情况下对景高度特征信息vh。若对景框中最高h
of
仅为视野中次高点建筑,则提取最高点h
of
对应的横坐标值x
of
,进一步提取视野中最高建筑矢量数据点的高度值h
os
=max{yj∈d}及其对应的横坐标x
os
。若最高点建筑在视野中横轴距离大于1/2的视野范围,即满足则通过vh=(h
of-h
os
)/l
view
完成对景高度特征数据化处理,获得这种情况下对景高度特征信息vh。针对其他情况,认为对景建筑高度不显著,vh值为0。
[0087]
对景特征数据化处理结果输出模块用于完成全部视点对景特征数据化处理并输出结果信息。首先确定对景体量特征信息vs与高度特征信息vh之间的权重关系α,通过公式v=α
·vs
(1-α)
•vh
进行加权融合,获取视点处对景特征信息v。通过python编程对三维视点集合op中的每一个视点,重复处理过程,最终完成全部视点处对景特征的数据化处理并输出对景特征信息。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。