1.本发明涉及门禁设施领域,特别一种基于无感支付机构的智慧停车系统。
背景技术:
2.无感支付机构停车系统,顾名思义,是一种不需要人为管理收费的停车管理装置,车主通过注册手机在线付费、ic卡刷卡付费,或者智能车牌识别等中的一种方式进出停车区域,实现了对车辆进行智能化管理。无感支付机构停车系统一般结构包括电动起落杆、控制电路板等,应用中,车主付费或者车牌识别设备识别后输出信号到控制电路板,控制电路板在其内部以及软件单元作用下先输出一定时间负正两极电源进入电动起落杆的电机减速机构,进而电机减速机构带动起落杆上升高度,一段时间内打开、车辆进入停车区域,间隔一定时间后控制电路板输出正负两极电源到电动起落杆的电机减速机构(也有的无感支付机构停车系统是采用电容式运转电机减速机构,控制电路板分别控制电机减速机构运转电容的两个接线端得电,进而实现电机减速机构的正反转控制、起落杆的升降控制),进而起落杆下降高度,防止未付费或者不允许进入的车辆进入停车区域(出停车区域不付费自动控制起落杆打开)。无感支付机构停车系统的电动起落杆在设备箱内具有上下限位开关,当起落杆上升到一定高度或下降一定高度后会分别输出信号到控制电路板,然后控制电路板控制电机减速机构失电不再带动起落杆运动,防止了起落杆不受控向上或向下运动间距过大而导致设备无法正常工作(实际情况下,起落杆没有上升到止点或者没有下降到止点时,控制电路板会一直输出正负或负正两极电源输入端)。
3.虽然现有的无感支付机构停车系统实现了一定程度上智能化管理,但是由于结构所限,实际使用中在前一辆车无感付费进入停车区域后,有可能紧跟在后面的车辆(包括人员)没有付费也要跟进付费后车辆进入停车区域内,这样当前端车辆进入停车场起落杆下降过程中,有可能起落杆落在后端车辆上或者和人员碰撞,造成车辆受损、起落杆损坏,或者人员受到伤害。综上所述,提供一种不但具有普通无感支付机构停车系统的功能,还能在起落杆工程中有车辆或人员接近时能自动控制起落杆上升高度、防止事故发生,且能对一段时间内车辆及行人违规进出停车区域数量进行统计,并能在出现违规现象时提示相关人员及保证费用收缴的系统显得尤为必要。
技术实现要素:
4.为了克服现有无感支付机构停车系统由于结构所限存在如背景所述弊端,本发明提供了基于通过注册手机在线付费或ic卡刷卡付费控制车辆进出停车区域的无感支付机构停车系统本体,不但具有普通无感支付机构停车系统的功能,应用中,在相关机构及电路共同作用下,当前端允许进入的车辆进入停车区域后、起落杆下降过程中,如果有车辆或行人跟进时,能自动控制起落杆上升高度,防止了车辆及起落杆等受到损坏及人员受到伤害的机率,并能自动对一段时间内违规跟进、进入停车区域的车辆及行人数量进行统计,还能实时提示相关人员(比如物管室内值班人员),为管理方制定更严格相关管理措施起到了有
利数据支撑,且还能在跟进前一辆车进入停车区域的未付费车辆驶离出停车区域前进行补充收费,由此保证了管理方收益的一种基于无感支付机构的智慧停车系统。
5.本发明解决其技术问题所采用的技术方案是:
6.一种基于无感支付机构的智慧停车系统,包括无感支付机构停车系统本体、摄像机;其特征在于还具有探测机构、控制机构、提示电路、统计单元、提示单元、分析单元、控制单元;所述统计单元、提示单元、分析单元、控制单元是安装在无感支付机构停车系统本体的控制电路板内应用软件;所述探测机构包括微波探测模块和触发子电路,控制机构包括干簧管、磁铁和输出子电路,探测机构、输出子电路、提示电路安装在元件盒内;所述磁铁安装在无感支付机构停车系统本体的起落杆外侧一端,干簧管安装在磁铁下端一侧;所述控制电路板的信号电源输出端和探测机构的电源输入端电性连接,探测机构的信号输出端和控制机构的信号输入端电性连接,控制电路板电源输出端和控制机构的控制电源输入端电性连接,控制机构的控制电源输出端和无感支付机构停车系统本体的电机减速机构的电源输入两端分别电性连接,控制机构的信号输出端和提示电路的信号输入端电性连接;所述控制电路板在控制起落杆正常下降高度有车辆进入微波探测模块探测区域过程中,控制单元会起动摄像机对违规车辆及人员进行摄像、图片信息进入统计单元,统计单元对数据进行储存,分析单元能对从停车内向外行驶的车辆通过摄像机输入的车辆信息进行比对,当车辆是违规车辆控制单元控制不打开起落杆,提示单元对车主进行补费提示,车主补费后,控制单元控制起落杆正常向上打开车辆驶离出停车区域。
7.进一步地,所述触发子电路包电性连接的电容、电阻、运放集成电路、二极管、npn三极管、pnp三极管、可调电阻,并和微波探测模块电性连接,微波探测模块的正极电源输入端和第一只可调电阻一端、第一只电阻一端、运放集成电路的正极电源输入端、pnp三极管发射极、第三只二极管负极连接,微波探测模块的信号输出端和电容正极连接,电容负极和微波探测模块的检测端连接,微波探测模块的输出端和运放集成电路的第一组反相输入端、第二组同向输入端连接,第一只可调电阻另一端和第二只电阻一端、运放集成电路的第一组同相输入端连接,第一只电阻另一端和第二只可调电阻一端、运放集成电路的第二组反向输入端连接,运放集成电路的两组输出端分别和第一只及第二只二极管负极连接,第一只及第二只二极管正极和第三只电阻一端连接,第三只电阻另一端和pnp三极管基极连接,微波探测模块的负极电源输入端和第二只电阻另一端、第二只可调电阻另一端、运放集成电路的负极电源输入端连接。
8.进一步地,所述干簧管是常闭触点端外壳干簧管,起落杆上升高度到能通过车辆的状态下,磁铁磁性作用于干簧管、干簧管内部触点开路。
9.进一步地,所述输出子电路包括电性连接的时间继电器模块和继电器,并和干簧管电性连接,时间继电器模块的正极电源输入端和干簧管一端连接,时间继电器模块的电源输出端和第一只继电器正极电源输入端、第二只继电器正极电源输入端连接,干簧管另一端第一只继电器正极控制电源输入端连接,时间继电器模块的负极电源输入端及负极控制电源输入端和第一只继电器负极电源输入端及负极控制电源输入端、第二只继电器负极电源输入端连接,第一只继电器两个常开触点端和第二只继电器两个常闭触点端分别连接。
10.进一步地,所述提示电路包括电性连接的二极管、继电器、讯响器和计数器,计数
器的计数键下两个触点和继电器控制触点端及常开触点端分别连接,继电器正极电源输入端和二极管正极连接,二极管负极和讯响器正极电源输入端连接,讯响器负极电源输入端和继电器负极电源输入端、计时器负极电源输入端连接。
11.本发明有益效果是:本发明基于通过注册手机在线付费或ic卡刷卡付费控制车辆进出停车区域的无感支付机构停车系统本体,具有普通无感支付机构停车系统的所有功能。应用中,当前端允许进入的车辆进入停车区域后、起落杆下降过程中,如果有车辆或行人跟进、微波探测模块探测到后在触发子电路及控制机构等共同作用下,能自动控制起落杆上升高度,防止了车辆及起落杆等受到损坏及人员受到伤害的机率,当后续跟进的车辆或人员进入停车区域后起落杆向下自动关闭。本发明能自动对一段时间内违规跟进、进入停车区域的车辆及行人数量进行统计,还能实时提示相关人员(比如物管室内值班人员),为管理方制定更严格相关管理措施起到了有利数据支撑,还能在相关统计单元、提示单元、分析单元、控制单元软件作用下,对跟进前一辆车进入停车区域的未付费车辆驶离出停车区域前进行补充收费,由此保证了管理方收益。基于上述,所以本发明具有好的应用前景。
附图说明
12.以下结合附图和实施例将本发明做进一步说明。
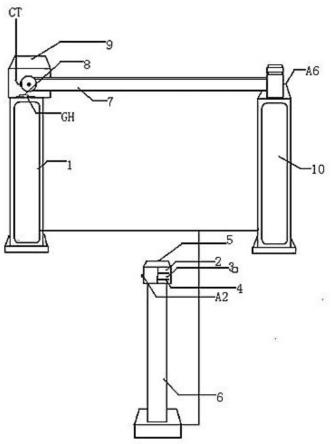
13.图1是本发明结构示意图。
14.图2是本发明电路图。
具体实施方式
15.图1中所示,一种基于无感支付机构的智慧停车系统,包括经注册手机在线付费或ic卡刷卡付费控制车辆进出停车区域的无感支付机构停车系统本体1、摄像机a6(摄像头位于右端起落杆支撑柱10的后侧端,能对进入停车区域内的车牌进行摄像),摄像机a6的信号输出端和无感支付机构停车系统本体内的控制电路板a2视频信号输入端c经信号线连接,摄像机镜头对准车道;还具有探测机构、控制机构、提示电路2、统计单元、提示单元、分析单元、控制单元;所述统计单元、提示单元、分析单元、控制单元是安装在控制电路板a2内的应用软件;所述探测机构包括微波探测模块a3和触发子电路3,控制机构包括干簧管gh、永久磁铁ct和输出子电路4,探测机构、输出子电路4、提示电路2安装在元件盒5内的电路板上,元件盒5安装在间隔无感支付机构停车系统本体起落架前端地面2米上的支撑柱6上、且微波探测模块a2的探测面朝向车道;所述磁铁ct安装在无感支付机构停车系统本体的起落杆7左外侧端中部,干簧管gh安装在一个外壳8内上端、且其动触点水平位于上部,外壳8安装在无感支付机构停车系统本体起落杆设备箱9的前端中部上、且位于起落杆7左端下部;所述控制电路板在控制起落杆7正常下降高度有车辆或行人进入微波探测模块探测区域、起落杆7又上升高度过程中,控制单元会起动摄像机a2对违规车辆及人员进行摄像、图片信息进入统计单元,统计单元对数据进行储存,分析单元基于人工智能对从停车内向外行驶的车辆通过摄像机输入的车辆信息进行比对,当车辆是违规车辆控制单元控制不打开起落杆,提示单元经扬声器对车主进行补费提示,车主补费后,控制单元控制起落杆7向上正常打开车辆驶离出停车区域。
16.图1、2所示,微波探测模块a3的型号是rd627,触发子电路包括经电路板布线连接
的电容c,电阻r1、r2、r3,型号ne5532n的运放集成电路a4,二极管vd3、vd1及vd2、pnp三极管q1、可调电阻rp1及rp2,并和微波探测模块a3经导线连接,微波探测模块a3的正极电源输入端4脚和第一只可调电阻rp1一端、第一只电阻r2一端、运放集成电路a4的正极电源输入端8脚、pnp三极管q1发射极、第三只二极管vd3负极连接,微波探测模块a3的外接天线端1、2脚分别和一只环形天线x两端连接,微波探测模块a3的信号输出端3脚和电容c正极连接,电容c负极和微波探测模块的检测端5脚连接,微波探测模块a3的输出端6脚和运放集成电路a4的第一组反相输入端2脚、第二组同向输入端5脚连接,第一只可调电阻rp1另一端和第二只电阻r1一端、运放集成电路a4的第一组同相输入端3脚连接,第一只电阻r2另一端和第二只可调电阻rp2一端、运放集成电路a4的第二组反向输入端6脚连接,运放集成电路a4的两组输出端1、7脚分别和两只二极管vd1及vd2负极连接,两只二极管vd1及vd2正极和第三只电阻r3一端连接,第三只电阻r3另一端和pnp三极管q1基极连接,微波探测模块a4的负极电源输入端7脚和第二只电阻r1另一端、第二只可调电阻rp2另一端、运放集成电路a4的负极电源输入端4脚连接。干簧管gh是常闭触点端玻璃外壳干簧管,起落杆7左端被带动上升高度到一定能通过车辆的状态下(起落杆左端还未接触上限位开关),磁铁ct刚好位于干簧管gh上端,永久磁铁ct磁性作用于干簧管gh、干簧管gh内部触点开路。输出子电路包括经电路板布线连接的时间继电器模块a5和继电器k1及k2,并和干簧管gh经导线连接,时间继电器模块a5的正极电源输入端1脚和干簧管gh一端连接,时间继电器模块a5的电源输出端9脚和第一只继电器k1正极电源输入端、第二只继电器k2正极电源输入端连接,干簧管gh另一端第一只继电器k1正极控制电源输入端连接,时间继电器模块a5的负极电源输入端2脚及负极控制电源输入端4脚和第一只继电器k1负极电源输入端及负极控制电源输入端、第二只继电器k2负极电源输入端连接,第一只继电器k1两个常开触点端和第二只继电器k2两个常闭触点端分别连接。提示电路包括经电路板布线连接的二极管vd、继电器k3、讯响器b和计数器a6,计数器a6的计数键sq下两个触点和继电器k3控制触点端及常开触点端分别连接,继电器k3正极电源输入端和二极管vd正极连接,二极管vd负极和讯响器b正极电源输入端连接,讯响器b负极电源输入端和继电器k3负极电源输入端、计时器a6负极电源输入端连接。
17.图1、2所示,控制机构的电源输入端时间继电器模块a5的1及2脚、提示电路的电源输入端计数器a6的1及2脚和无感支付机构停车系统本体内的开关电源模块a1的电源输出端3、4脚分别经导线连接。无感支付机构停车系统本体的控制电路板a2正负及负正两路电源输出端和电机减速机构m相连的导线断开,控制电路板a2的正负两极电源输出端和探测机构的电源输入两端微波探测模块a3的4及7脚分别经导线连接。探测机构的信号输出端pnp三极管q1集电极和控制机构的信号输入端时间继电器模块a5的3脚经导线连接。控制电路板a2正负及负正两路电源输出端和控制机构的继电器k2两个控制电源输入端分别经导线连接,控制机构的控制电源输出端继电器k1两个常开触点端、继电器k2两个常闭触点端和电机减速机构m的电源输入两端分别经导线连接,控制机构的信号输出端时间继电器模块a5的9脚和提示电路的信号输入端继电器k3正极电源输入端9脚经导线连接。
18.图1、2所示,本发明基于通过注册手机在线付费或ic卡刷卡付费控制车辆进出停车区域的无感支付机构停车系统本体,具有普通无感支付机构停车系统的所有功能;应用中,车主通过注册手机在线付费或ic卡刷卡付费后,控制电路板a2在其内部以及软件单元作用下先输出一定时间负正两极电源进入电动起落杆的电机减速机构m电源输入端,进而
电机减速机构m的动力输出轴带动起落杆7上升高度,一段时间内打开、车辆可进入停车区域,间隔一定时间后(比如7秒钟)控制电路板a2输出正负两极电源到电动起落杆的电机减速机构m,进而电机减速机构m的动力输出轴带动起落杆7下降高度,防止未付费或者不允许进入的车辆进入停车区域(车辆出停车区域、不需要付费,控制电路板自动控制起落杆打开),无感支付机构停车系统本体的电动起落杆具有上下限位开关,在起落杆7上升到一定高度或下降一定高度后会分别输出信号到控制电路板a2,然后控制电路板a2控制电机减速机构m失电不再带动起落杆运动,防止了起落杆7不受控向上或向下运动间距过大而导致设备无法正常工作(实际情况下,起落杆没有上升到止点或者没有下降到止点时,控制电路板a2会一直输出正负或负正两极电源输入端)。220v交流电源进入开关电源模块a2的电源输入端后,开关电源模块a2的电源输出端3、4脚输出稳定的直流12v电源进入控制机构及提示电路的电源输入端,于是,控制机构及提示电路得电工作。本发明中,起落杆正常升降中,控制电路板a2输出正负及负正两极电源时,电源两极分别经继电器k2两个控制电源输入端及两个常闭触点端进入电机减速机构m的正负及负正两极电源输入端,电机减速机构m正常带动起落杆升降。本发明中,当前端车辆正常进入停车区域、起落杆7下降过程中(此刻前端车辆离开了微波探测模块的探测范围),控制电路板a2输出的负正两极电源会进入探测机构的电源输入端(二极管vd3起到单向导通作用,防止了控制电路板a2输出正负两极电源的过程中,探测机构得电工作),于是,探测机构得电工作。
19.图1、2所示,探测机构得电工作的时间内,如果微波探测模块a3的探测头前后2米没有移动人员或车辆时,此刻12v电源经可调电阻rp1及电阻r1分压进入运放集成电路a4的第一组同相输入端3脚电压高于6v、经电阻r2、可调电阻rp2分压进入运放集成电路a4的第二组反向输入端6脚电压低于6v,而微波探测模块a3由于探测头前没有检测到移动物体(工作时,微波探测模块a3经环形天线x向空间发射微波信号,在左、右、前、后2米左右空间产生立体的微波覆盖区域,也就是探测区域),微波探测模块a3的6脚输出的恒定6v电压使进入运放集成电路a4的反向输入端2脚电压低于同相输入端3脚电压,同时使运放集成电路a4的反向输入端6脚电压低于同相输入端5脚电压,那么运放集成电路a4的1及7脚均输出高电平,二极管vd1、vd2反向截止,后级的继电器k1、k2不会得电吸合。实际情况下,前一辆车进入停车区域、起落杆正常下降中,如果有人或车辆进入了微波探测模块a3的探测区域时,微波探测模块a3的6脚输出的电压在6v左右波动,这样,会使运放集成电路a4的反向输入端2脚电压高于同相输入端3脚电压,或者使运放集成电路a4的反向输入端6脚电压高于同相输入端5脚电压,那么运放集成电路a4的1或7脚会停止输出高电平、转而输出低电平,低电平经二极管vd1或vd2导通后,再通过电阻r3降压限流后进入pnp三极管q1的基极,pnp三极管q1导通后集电极输出高电平进入时间继电器模块a5的正极触发信号输入端3脚。时间继电器的a5的3脚输入高电平信号后在其内部电路及技术人员设定的9脚输出电源时间作用下会输出一定时间(比如5秒钟)高电平电源进入继电器k1、\k2、k3正极电源输入端,于是,继电器k1、k2、k3均得电吸合。继电器k2得电吸合后其两个控制电源输入端和两个常闭触点端开路,这样,控制电路板a2此刻输出的负正两极电源暂时不会进入电机减速机构m的正负两极电源输入端,也就是说,此刻控制电路板a2输出的正负两极电源不再控制电机减速机构m的工作方式;继电器k1得电吸合后其两个控制电源输入端和两个常开触点端分别闭合,这样,12v正负两极电源会经继电器k1进入电机减速机构m的正负两极电源输入端,电机减速
机构m得电后在其内部机构作用下,会带动起落杆7上升高度,这样,起落杆会打开,后端跟进的车辆或人员就可正常进入停车区域,尽可能防止了前端车辆进入停车区域起落杆7下降高度时、跟进的车辆或人员和起落杆碰撞受到损坏或伤害(起落杆7左端被带动上升高度到一定能通过车辆的状态下(起落杆左端还未接触上限位开关,因此控制电路板a2会一直输出正负两极电源),磁铁ct刚好位于干簧管gh上端,磁铁ct磁性作用于干簧管gh、干簧管gh内部触点开路,那么继电器k1会失电其控制电源输入端和常开触点端开路,电机减速机构m不再带动起落杆7上升高度)。继电器k3得电吸合的同时,高电平还会经二极管vd单向导通进入讯响器b的正极电源输入端,于是,同步讯响器b会发出响亮的提示声音,提示车辆驾驶员或行人违规进入了停车区域,并能实时提示相关人员(比如物管室内值班人员)有人或车辆违规进入了停车区域。实际情况下每次有人或车辆违规进入停车区域、继电器k3得电吸合控制触点端及常开触点端闭合的时间内,计数器的计数键sq键下两个触点会闭合一次(相当于人手按一次计数键),于是,计数器a6(显示界面位于元件盒外)会进行一次累加计数,这样后续管理人员就可通过计数器a5的累加计数清楚了解到一段时间内违规进入停车区域的行人或车辆数量(计数器a6具有清零键,按下后计数器可进行重新累加计数),为管理方制定更严格相关管理措施起到了有利数据支撑(比如可制定罚款措施等,减少违规进入停车区域的车辆或行人数量)。
20.图1、2所示,实际情况下,时间继电器模块a5的9脚停止输出电源后,继电器k1、k2、k3均失电不再工作,由于此刻控制电路板a2电源输出端继续输出正负两极电源,所以电机减速机构m2正负两极又会经继电器k2两个控制电源输入端及两个常闭触点端得电,进而带动起落杆7下降高度,为下次有车辆进入停车区域做好控制(无感支付机构停车系统本体的电动起落杆在设备箱9内具有上下限位开关,在起落杆上升到一定高度或下降一定高度后会分别输出信号到控制电路板a2,然后控制电路板a2控制电机减速机构m失电不再带动起落杆运动,防止了起落杆7不受控向上或向下运动间距过大而导致设备无法正常工作)。在应用中,极端情况下假定后端跟进的车辆及行人后,还有不守规矩的车辆或行人跟进要进入停车区域时,继电器k1、k2、k3又会得电吸合,和上述控制过程完全一致,起落杆7又会打开一段时间,尽可能防止车辆及起落杆受到损坏或人员受到伤害。本发明中,控制电路板a2在控制起落杆7正常下降高度有车辆或行人进入微波探测模块a3探测区域、起落杆7又上升高度过程中,控制单元会起动摄像机a6对违规车辆及人员进行摄像、图片信息进入统计单元,统计单元对数据进行分类别储存,分析单元基于人工智能对从停车内、向外行驶的所有车辆通过摄像机输入的车辆信息进行比对,当车辆不是上次非允许进入停车区域的违规车辆时,控制单元控制打开起落杆7(后续自动关闭),这样车辆能正常行驶出停车区域,当车辆是违规车辆控制单元控制不打开起落杆7,提示单元经控制电路板a2的音频电源输出端y输出高电平进入讯响器b的正极电源输入端,讯响器b得电发出警示声对车主进行补费提示,车主通过注册手机登录app或者ic刷卡补费后,控制单元控制起落杆7正常向上打开(后续自动关闭)车辆驶离出停车区域。图2中,二极管vd、vd1、vd2、vd3、型号是1n4007;电阻r1、r3、r3阻值分别是10k、5.1k、1k;继电器k1、k2、k3是dc12v继电器;讯响器b是型号sf12v的有源连续声讯响报警器成品;pnp三极管q1型号是9012;干簧管gh是玻璃外壳常闭触点干簧管;电容c型号是47uf/25v,主要作用是将微波探测模块a3探测的信号经3脚通过电容c1耦合到5脚进入内部电路进行处理放大,再通过6脚输出电压信号;可调电阻rp1、rp2型号是
10k、分别调节可调电阻rp1、rp2的阻值,能调节微波探测模块a3的探测距离,可调电阻rp1、rp2的阻值调节得相对大、分压大时,那么微波探测模块a3的探测距离变近、反之变远;时间继电器模块a5是型号yyc-2s的时间控制器模块成品,时间控制器模块成品a5具有两个电源输入端1及2脚、两个触发信号输入端3及4脚、一只设置按键5脚、一只急停按键6脚、一只时间加按键7脚、一只时间减按键8脚、一个常开电源输出端9脚,时间控制器模块成品a5的正负两极电源输入端通电后,操作者按下设置按键后,分别操作时间加按键、时间减按键,可以设定在需要的时间段常开电源输出端输出正极电源,设定的时间段过后,常开电源输出端停止输出电源,时间设置好、两个触发信号输入端每被输入触发电源信号后,时间继电器模块成品进行设定的时间计时;计数器a6是型号sd76的计数器成品,计数器a6具有两个电源输入端,计数器a6具有无电压触发端口sq,触发端口两个接线端闭合后,计数器a6进行一次累加计数,计数器a6还具有清零按键,清零按键按下后,计时器a6的计数清零重新开始计数。
21.以上显示和描述了本发明的基本原理和主要特征及本发明的优点,对于本领域技术人员而言,显然本发明限于上述示范性实施例的细节,而且在不背离本发明的精神或基本特征的情况下,能够以其他的具体形式实现本发明。因此,无论从哪一点来看,均应将实施例看作是示范性的,而且是非限制性的,本发明的范围由所附权利要求而不是上述说明限定,因此旨在将落在权利要求的等同要件的含义和范围内的所有变化囊括在本发明内。不应将权利要求中的任何附图标记视为限制所涉及的权利要求。
22.此外,应当理解,虽然本说明书按照实施方式加以描述,但并非每个实施方式仅包含一个独立的技术方案,说明书的这种叙述方式仅仅是为清楚起见,本领域技术人员应当将说明书作为一个整体,实施例中的技术方案也可以经适当组合,形成本领域技术人员可以理解的其他实施方式。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。