1.本发明涉及多普勒流速剖面仪(adcp)技术领域,更具体地说,是涉及一种声学多普勒流速剖面仪底跟踪速度的动底误差校正方法。
背景技术:
2.声学多普勒流速剖面仪(adcp)是基于声学多普勒频移原理设计的一种测量水体流速、流向的设备。当采用水面浮动方式实施测量作业时,adcp可以测量水体相对于adcp仪器的水流速度和水底参考层相对于adcp仪器的速度,前者称为水跟踪速度,后者称为底跟踪速度。水底参考层静止的前提下,底跟踪速度代表水面浮动的adcp仪器的移动速度,两者相加为水流的真正对地速度。但是,当水底存在流动的高含沙水层时,adcp底跟踪速度包含了水底高含沙水层流速,这使得adcp仪器对地速度测量结果出现误差,这种误差称之为动底误差。
3.目前见诸报导的消除底跟踪速度动底误差的做法主要分为两类。其一为使用相邻历元gps测速(gga速度或vtg速度)直接替代底跟踪速度的方法[1~4];其二为往返回环估计方法[5,6]。
[0004]
但一方面,正如chad&david(2011)[1]、蒋建平(2013)[3]、张红梅等(2016)[7]所指出的,gps天线运动速度直接替代底跟踪速度的方法,忽视了因gps和adcp安装位置不同导致的姿态因素对估计adcp仪器运动速度的影响,仅适用于adcp仪器浮体直线运动工况。当浮动载体(如测船)非直线运动或受波浪影响快速晃动时,瞬态gps速度与adcp仪器实际运动速度存在较大差异。且gps测速绝对精度远低于底跟踪测速技术,gps速度替代方法有助于改善断面积分流量测量精度,但并不能满足局地、短时水流流速测验精度需求。
[0005]
另一方面,正如instruments r.d.(2007)[5]、缪连华(2014)[6]所述,往返回环估计方法主要用于直线断面积分流量监测,需要adcp仪器浮动载体(如测船)运动轨迹在监测断面两端端点位置相同。起始点位置偏移量估计所得动底速度为往返断面的平均结果,不能直接代表断
·
面上任意点处的动底误差。
[0006]
由以上叙述可知,对于常见的定点船载海流观测以及锚系浮标自动水流观测作业方式,其动底误差随时间缓慢变化且浮体安装的gps瞬态速度受姿态干扰的特点使得当前尚缺乏精度可控的adcp底跟踪速度动底误差校正方法。
[0007]
因此,基于动底误差随时间变化缓慢、浮体安装gps“长时间”定位轨迹天然滤除浮体姿态影响的两个事实前提,设计实现一种声学多普勒流速剖面仪底跟踪速度的动底误差校正方法,可在无视gps与adcp相对安装位置的前提下显著改善定点船载海流观测以及锚系浮标自动水流观测作业方式下的adcp测流精度。
[0008]
以下给出检索的相关文献:
[0009]
[1]chad r.w.,david s.m.comparison of bottom-track to global positioning system referenced discharges measured using an acoustic doppler current profiler[j].journal of hydrology,2011,401(3-4),250:258;
[0010]
[2]蒋建干,韦立新,李树明,章磊,陈健健,曾瑞,周绍阳,丁院锋,刘汉伟,朱汉华.一种大含沙量河流的流量测量方法[p].江苏省:cn113049052a,2021-06-29;
[0011]
[3]蒋建平.走航式声学多普勒流速仪投产方法探讨[j].水利信息化,2013(02):40-43 47.doi:10.19364/j.1674-9405.2013.02.010;
[0012]
[4]陈力平,方波,季成康.应用gps技术改正adcp测量误差[j]人民长江,2002(01):36-37.doi:10.16232/j.cnki.1001-4179.2002.01.016;
[0013]
[5]instruments r d.winriver user’s guide[j].rd instruments poway,ca,usa,2007;
[0014]
[6]缪连华.一种“动底”情况下adcp流量误差修正方法[j].广东水利水电,2014(08):84-86;
[0015]
[7]张红梅,陈志高,赵建虎,黄家勇,王真祥.基于集成外部传感器的adcp精确测量方法研究[j]武汉大学学报(信息科学版),2016,41(08):1131-1136.doi:10.13203/j.whugis20130311。
技术实现要素:
[0016]
本发明目的在于提供一种声学多普勒流速剖面仪底跟踪速度的动底误差校正方法,消除定点船载海流观测以及锚系浮标自动水流观测作业方式下因“动底”导致的adcp测流误差。
[0017]
本发明提出一种声学多普勒流速剖面仪底跟踪速度的动底误差校正方法。包括以下步骤:
[0018]
步骤s1:采用水面浮动测量作业方式,同步采集刚性固定安装的adcp和gps的数据,得到所需测量时间内同步的gps天线经度坐标l、gps天线纬度坐标b、adcp底跟踪速度东分量ve
btk
、北分量vn
btk
和adcp水跟踪速度东分量ve
water
、北分量vn
water
;
[0019]
步骤s2:基于下式将gps天线经度坐标l、gps天线纬度坐标b转换为gps速度的东分量ve
gps
和北分量vn
gps
;
[0020][0021]
式中,脚标i代表当前时刻;脚标i-1代表前一时刻;δt为前后时刻的时间间隔;ε为wgs84椭球扁率=1/298.257223563;r为wgs84椭球长轴半径=6378137m。
[0022]
步骤s3:将ve
btk
和vn
btk
、ve
gps
和vn
gps
实施一次卡尔曼滤波。
[0023]
步骤s4:将滤波后的ve
btk
和vn
btk
、ve
gps
和vn
gps
按照下式转换为底跟踪/gps的东向坐标x
btk
/x
gps
和北向坐标y
btk
/y
gps
:
[0024]
[0025][0026]
式中,n代表ve
btk
或ve
gps
时间序列的长度,t为测量时间。
[0027]
步骤s5:假定p0时段内动底速度恒定,取第i时刻时间、底跟踪和gps坐标记录[t(i),x
btk(i)
,y
btk(i)
,x
gps(i)
,y
gps(i)
],找到t
(j)
=t(i) p0的第j时刻时间、底跟踪和gps坐标记录[t
(j)
,x
btk(j)
,y
btk(j)
,x
gps(j)
,y
gps(j)
];
[0028]
步骤s6:按照下式计算t(i)时刻粗估动底速度东分量和北分量
[0029][0030]
步骤s7:重复步骤s5和步骤s6完成所有时刻粗估动底速度计算,尾部p0时段内标记为nan;
[0031]
步骤s8:取第i时刻开始的p0时段(t(i)~t
(j)
=t(i) p0)内的所有动底速度东、北分量估算记录子集:和
[0032][0033]
步骤s9:按照下式计算和的均值m
ve
和m
ve
、标准差σ
ve
和σ
ve
:
[0034][0035][0036]
式中,m为序列元素个数,k=1,2,
…
,m。
[0037]
步骤s10:按照下式规则提取子集和的有效元素,子集内有效元素的平均值即为t
(j)
时刻的最优估计动底速度东分量ve
movingbed(j)
、北分量vn
movingbed(j)
。
[0038]
[0039][0040]
步骤s11:重复步骤s8~s10完成所有时刻最优动底速度东分量ve
movingbed
和北分量vn
movingbed
的计算,并置开始的p0时段内动底速度为第一个有效最优动底速度计算值。
[0041]
步骤s12:将每一时刻的底跟踪速度与计算所得最优动底速度矢量相减得到最终校正动底误差后的底跟踪速度东分量北分量
[0042][0043]
本发明所提供的声学多普勒流速剖面仪底跟踪速度的动底误差校正方法,考虑到动底误差随时间变化缓慢和浮体安装gps“长时间”定位轨迹天然滤除浮体姿态影响的事实,基于动底会导致浮体轨迹向上游偏移的原理,结合滑动轨迹片段滤波的处理方式,实现了无视gps与adcp相对安装位置和浮体颠簸姿态干扰的前提下估算adcp底跟踪速度的动底误差,保留了adcp底跟踪测速精度高于gps的优点,可以显著提高定点船载海流观测以及锚系浮标自动水流观测作业方式下的adcp测流精度。
附图说明
[0044]
图1为本发明实施例的adcp和gps安装位置示意图;
[0045]
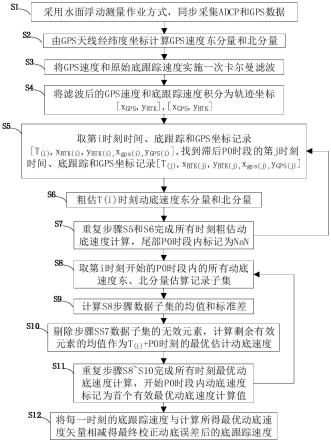
图2为本发明实施例的流程示意图;
[0046]
图3为本发明实施例部分时段的最优估计动底速度与gps vtg测速、gps gga测速对比示意图;
[0047]
图4为本发明实施例部分时段的adcp原始底跟踪速度与动底误差校正后的底跟踪速度对比示意图。
具体实施方式
[0048]
实施例
[0049]
参阅图2,图2给出了一种声学多普勒流速剖面仪底跟踪速度的动底误差校正方法实施例的流程示意图。
[0050]
如图2所示本实施例所提供的方法包含下述步骤:
[0051]
步骤s1:在长江口南槽[121
°
49.61
′
e,31
°
12.73
″
]采用船载测量模式,如图1所示安装一台rdiadcp600khz和一台trimblesps351dgps,同步采集26小时adcp和gps数据,得到26小时内同步的gps天线经度坐标l、gps天线纬度坐标b、adcp底跟踪速度东分量ve
btk
、北分量vn
btk
和adcp水跟踪速度东分量ve
water
、北分量vn
water
;
[0052]
步骤s2:基于下式将gps天线经度坐标l、gps天线纬度坐标b转换为gps速度的东分量ve
gps
和北分量vn
gps
;
[0053]
[0054]
式中,脚标i代表当前时刻;脚标i-1代表前一时刻;δt为前后时刻的时间间隔;ε为wgs84椭球扁率=1/298.257223563;r为wgs84椭球长轴半径=6378137m。
[0055]
步骤s3:将ve
btk
和vn
btk
、ve
gps
和vn
gps
实施一次卡尔曼滤波。
[0056]
步骤s4:将滤波后的ve
btk
和vn
btk
、ve
gps
和vn
gps
按照下式转换为底跟踪/gps的东向坐标x
btk
/x
gps
和北向坐标y
btk
/y
gps
:
[0057][0058][0059]
式中,n代表ve
btk
或ve
gps
时间序列的长度,t为测量时间。
[0060]
步骤s5:假定p0=10分钟时段内动底速度恒定,取第i时刻时间、底跟踪和gps坐标记录[t(i),x
btk(i)
,y
btk(i)
,x
gps(i)
,y
gps(i)
],找到t
(j)
=t(i) p0的第j时刻时间、底跟踪和gps坐标记录[t
(j)
,x
btk(j)
,y
btk(j)
,x
gps(j)
,y
gps(j)
];
[0061]
步骤s6:按照下式计算t(i)时刻粗估动底速度东分量和北分量
[0062][0063]
步骤s7:重复步骤s5和步骤s6完成所有时刻粗估动底速度计算,最后p0=10分钟时段内的粗估动底速度标记为nan;
[0064]
步骤s8:取第i时刻开始的p0=10分钟时段(t(i)~t
(j)
=t(i) p0)内的所有动底速度东、北分量估算记录子集:和
[0065][0066]
步骤s9:按照下式计算和的均值m
ve
和m
ve
、标准差σ
ve
和σ
ve
:
[0067]
[0068][0069]
式中,m为序列元素个数,k=1,2,
…
,m。
[0070]
步骤s10:按照下式规则提取子集和的有效元素,子集内剩余有效元素的平均值即为t
(j)
时刻的最优估计动底速度东分量ve
movingbed(j)
、北分量vn
movinggbed(j)
。
[0071][0072][0073]
步骤s11:重复步骤s8~s10完成所有时刻最优动底速度东分量ve
movingbed
和北分量vn
movingbed
的计算,并置开始的p0=10分钟时段内动底速度为第一个有效最优动底速度计算值。
[0074]
步骤s12:将每一时刻的底跟踪速度与计算所得最优动底速度矢量相减得到最终校正动底误差后的底跟踪速度东分量北分量
[0075][0076]
图3即为步骤s11所得落潮时段内的最优估计动底速度与gps vtg速度、gps gga速度对比结果。可见,最优估计动底速度与原始gps测速相比更为平滑且不含浮体高频回旋晃动产生的虚假速度成分。
[0077]
图4即为步骤s12所得落潮时段内的动底误差校正后的底跟踪速度与adcp原始底跟踪速度对比结果。可见,与传统直接使用gpsvtg速度替代方案相比较,本发明提供的技术方案在修正动底误差的同时,兼顾保留了adcp底跟踪测速精度高于gps的优点。
[0078]
最后需要指出的是:以上实施例仅用以说明本发明的技术方案,而非对其限制。本领域的普通技术人员应当理解:可以对前述各实施例所记载的技术方案进行修改,或者对其中部分技术特征进行等同替换;这些修改或者替换,并不使相应技术方案的本质脱离本发明各实施例技术方案的精神和范围。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。