1.本发明涉及计算机技术领域,特别是涉及一种基于自学习的计算机启动盘启动顺序控制方法。
背景技术:
2.常见的系统启动设备包括网络、usb、硬盘、光盘及uefi shell等,当更换硬件后,该启动设备将会默认加载到启动顺序列表的最后,这就导致系统启动速度慢,或出现系统一直卡在uefi shell命令行界面无法正常进入操作系统。此时,用户必须进入bios设置界面,手动对启动项进行调整,增加了用户的工作量,对部分用户来说操作难度高。
技术实现要素:
3.本发明的目的在于克服现有技术的一项或多项不足,提供一种基于自学习的计算机启动盘启动顺序控制方法。
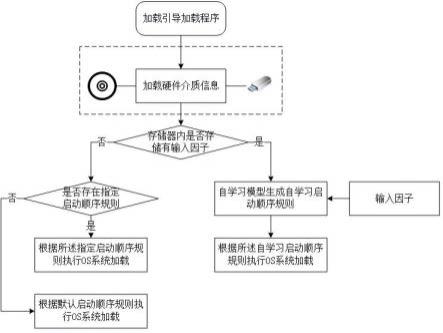
4.本发明的目的是通过以下技术方案来实现的:基于自学习的计算机启动盘启动顺序控制方法,应用于飞腾处理器中的引导系统模块,包括:s100.加载引导加载程序;s200.加载硬件介质信息;s300.判断存储器内是否存储有输入因子,若所述存储器内存储有输入因子,则执行s400,否则执行s600;s400. 将所述输入因子输入预设的自学习模型,所述自学习模型生成自学习启动顺序规则,并执行s500;s500.根据所述自学习启动顺序规则执行os系统加载;s600.判断是否存在指定启动顺序规则,若存在指定启动顺序规则,则执行s700,否则执行s800;s700.根据所述指定启动顺序规则执行os系统加载;s800.根据默认启动顺序规则执行os系统加载。
5.优选的,所述默认启动顺序规则为上一次成功启动的启动顺序规则。
6.优选的,所述指定启动顺序规则为用户预先设置的启动顺序规则。
7.优选的,所述输入因子包括介质类型、各类型介质的正常启动次数和场景应用中的一种或多种。
8.优选的,自学习模型生成自学习启动顺序规则,包括:将各输入因子对应的数据进行多元线性回归得到各变量的回归系数;根据各变量的回归系数生成自学习启动顺序规则。
9.优选的,将各输入因子对应的数据进行多元线性回归得到各变量的回归系数,包括:将各输入因子对应的数据转换为标准分;
根据所述标准分进行多元线性回归得到各变量的回归系数。
10.本发明的有益效果是:本发明利用自学习模型自动调整启动顺序,能够依据自身所使用的场景(如更换硬盘、网络控制、检验测试等),学习和预测本次启动的场景和应用用途,自动为用户提供不同的启动顺序,无需用户手动配置,减少了用户的工作量。
附图说明
11.图1为计算机启动盘启动顺序控制方法的一个实施例的流程图;图2为飞腾处理器的一个固件框图;图3为飞腾处理器的一个通用固件执行框图。
具体实施方式
12.下面将结合实施例,对本发明的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域技术人员在没有付出创造性劳动的前提下所获得的所有其他实施例,都属于本发明保护的范围。
13.参阅图1-图3,本实施例提供了一种基于自学习的计算机启动盘启动顺序控制方法:如图1所示,基于自学习的计算机启动盘启动顺序控制方法,应用于飞腾处理器中的引导系统模块,包括:s100. 加载引导加载程序。
14.在一个实施例中,以飞腾ft-2000/4处理器为例,飞腾固件分为两层:飞腾处理器基础固件(processor base firmware,pbf)和系统固件(system firmware,sfw),如图2所示。飞腾处理器基础固件负责处理器芯片的基本初始化,并提供相关的服务,同时还负责加载运行在安全态(secure world)下的 secure os。
15.如图3所示,飞腾处理器的固件启动执行流程为:飞腾处理器加电后,首先运行位于flash中的pbf,完成最基本的处理器芯片初始化后,然后跳转到位于flash中的system firmware。system firmware根据系统需要,依次调用pbf提供的各模块初始化服务。具体包括以下内容:a. pll(cpu倍频控制器):体现在飞腾包目录下,platformpei文件下的platformpei.c,函数原型为void pllinit(uint16 maxddrfrequency),主要体现初始化用户设置倍频速率等相关参数;b. 内存控制器:体现在飞腾包目录下,platformpei文件下的platformpei.c,函数原型为void ddrinit(uint32 s3flag),主要是初始化用户设置内存通道、速率等相关参数;c. pcie控制器:体现在飞腾包目录下,platformpei文件下的platformpei.c,函数原型为void pcieinit(void),主要是初始化用户设置pcie通道、速率等相关参数。
16.完成以上相应模块的初始化后,pbf还提供一些查询复位,比如,查询系统复位的原因 (reset source)。复位原因在源码体现在platformpei文件下的platformpei.c,函数原型为uint32 getresetsource(),主要是获取cpu复位的原因。pbf第一次进入system firmware时,并未初始化内存,pbf没有内存可用,功能受限。为此,system firmware 基于pbf的内存初始化服务,完成内存初始化后,必须显式调用pbf 提供的重定位服务
(relocation),由pbf重定位服务将pbf自身加载到内存中,并完成pbf服务的内存重定位。 system firmware完成相关的系统初始化后,加载操作系统。
17.s200.加载硬件介质信息。所述硬件介质主要包括flash闪存、cd盘、固态硬盘、机械硬盘等存储介质,在硬件介质信息中存放的是飞腾的uefi固件,用于cpu启动的初始化以及调用服务等功能,在硬件的介质的内部flash中存放介质内容、介质硬件信息等。在设定完成规则后,在存储介质规定区域类存放规则制定类,完成规则制定。
18.s300.判断存储器内是否存储有输入因子,若所述存储器内存储有输入因子,则执行s400,否则执行s600。
19.在一个实施例中,所述输入因子包括介质类型、各类型介质的正常启动次数和场景应用中的一种或多种。
20.s400. 将所述输入因子输入预设的自学习模型,所述自学习模型生成自学习启动顺序规则,并执行s500。
21.在一个实施例中,自学习模型生成自学习启动顺序规则,包括:将各输入因子对应的数据进行多元线性回归得到各变量的回归系数;根据各变量的回归系数生成自学习启动顺序规则。其中,将各输入因子对应的数据进行多元线性回归得到各变量的回归系数,包括:将各输入因子对应的数据转换为标准分;根据所述标准分进行多元线性回归得到各变量的回归系数。本实施例中先将所有变量(次数、介质、场景等)和因变量都先转化为标准分,再进行线性回归,此时得到的回归系数就能反映对应自变量的重要程度,这时的回归方程称为标准回归方程,回归系数称为标准回归系数,表示如下:zy = β0 β1x1 β2x2
……
βkxk γ,关联规则分析建立出场景模型。建立模型主要实现在mdemodulepkg包目录下的bdsentry.c,实现的方法原型为void bootformfv(void)。
22.在一个实施例中,所述基于自学习的计算机启动盘启动顺序控制方法还包括:记录每次成功启动时各输入因子对应的数据。
23.所述输入因子包括介质类型、对应介质类型的次数和场景应用等参数中的一种或多种,自学习模型将这些参数的数据保存在多阶缓存中,在完成数据记录后,将数据进行多元线性回归。本实施例中,多元线性回归就是将所有变量(次数、介质、场景等)和因变量都先转化为标准分,再进行线性回归,此时得到的回归系数就能反映对应自变量的重要程度(实现自学习引擎)。这时的回归方程称为标准回归方程,回归系数称为标准回归系数,表示如下:zy = β0 β1x1 β2x2
……
βkxk γ,关联规则分析建立出场景模型。建立模型主要实现在mdemodulepkg包目录下的bdsentry.c,实现的方法原型为void bootformfv(void)。
24.s500.根据所述自学习启动顺序规则执行os系统加载。
25.s600.判断是否存在指定启动顺序规则,若存在指定启动顺序规则,则执行s700,否则执行s800。
26.一般的,所述指定启动顺序规则为用户预先设置的启动顺序规则。例如,用户选择usb、dvd、shell等介质的优先级进行排序,从而生成指定启动顺序规则。
27.s700.根据所述指定启动顺序规则执行os系统加载。
28.s800.根据默认启动顺序规则执行os系统加载。
29.一般的,所述默认启动顺序规则为上一次成功启动的启动顺序规则。
30.执行os系统加载时,对启动顺序规则(自学习启动顺序规则、指定启动顺序规则或
默认启动顺序规则等)中的硬件介质进行扫面筛选,判断规则中的介质是否存在可引导的os系统,最后根据扫描具有可引导os系统的介质进行快速与规则融合匹配,主要实现在mdemodulepkg包目录下的bdsentry.c,实现的函数原型为booleanbootbootoptions(inefi_boot_manager_load_option*bootoptions,inuintnbootoptioncount,inefi_boot_manager_load_option*bootmanagermenuoptional)中,并正确引导os系统。
31.以上所述仅是本发明的优选实施方式,应当理解本发明并非局限于本文所披露的形式,不应看作是对其他实施例的排除,而可用于各种其他组合、修改和环境,并能够在本文所述构想范围内,通过上述教导或相关领域的技术或知识进行改动。而本领域人员所进行的改动和变化不脱离本发明的精神和范围,则都应在本发明所附权利要求的保护范围内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。