基于人工智能的rfid标签移动方向判定方法及系统
技术领域
1.本发明涉及人工智能技术领域,尤其涉及rfid(射频识别)标签移动时判断移动方向的方法及系统。
背景技术:
2.目前,在现代工厂里,如果需要实现自动化和无人化的内部物流,在完成物料数字化登记之后,亟需对物料在工厂或仓库内的流转进行跟踪。目前资产数字化的主要方案是使用条码标签或者电子标签,通过读卡器完成物料入库或者产线状态更新等操作,此类操作均需要人工介入以保证准确性,也无法满足判断资产移动方向等需求。
技术实现要素:
3.本发明的目的在于提供基于人工智能的rfid标签移动方向判定方法及系统,以较低成本实现rfid标签移动方向判定。
4.实现上述目的的技术方案是:
5.一种基于人工智能的rfid标签移动方向判定方法,包括:
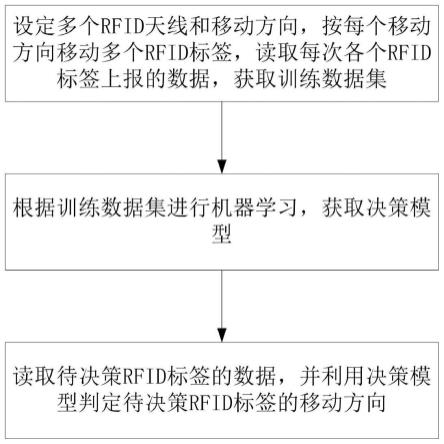
6.设定多个rfid天线和移动方向,按每个移动方向移动多个rfid标签,读取每次各个rfid标签上报的数据,获取训练数据集;
7.根据训练数据集进行机器学习,获取决策模型;
8.读取待决策rfid标签的数据,并利用决策模型判定待决策rfid标签的移动方向。
9.优选的,单次每个rfid标签上报的数据,包括:每相邻两个rfid天线之间读卡的时间差以及各rfid标签信号的特征值。
10.优选的,所述的决策模型中,
11.如果输出的判定值只有两个方向,则用二分类函数进行回归分析和输出;
12.如果输出的判定值大于两个,使用多分类函数进行回归分析和输出。
13.优选的,所述的决策模型对输出的准确性进行校验;所述的决策模型支持外部新增的输入判定。
14.一种基于人工智能的rfid标签移动方向判定系统,包括:一组rfid天线、多个rfid标签以及连接各所述rfid天线的读卡器,
15.所述读卡器包括:
16.用于读取rfid标签上报的数据,获取训练数据集和待决策rfid标签的数据的读卡模块;
17.根据训练数据集进行机器学习,获得决策模型的训练模块;
18.载入决策模型,根据待决策rfid标签的数据判定待决策rfid标签的移动方向的决策模块。
19.优选的,rfid天线的数量为4个。
20.优选的,训练数据集中数据指:设定多个移动方向,按每个移动方向移动多个rfid
标签,读取的每次各个rfid标签上报的数据。
21.本发明的有益效果是:本发明无需大量和昂贵的硬件投入,只需对rfid读卡器进行软件升级,通过给读卡器的软件增加训练模块和决策模块,即可支持判定rfid标签移动的方向,成本较低并准确度较高。对比目前的判断资产移动方向的方式都容易受到干扰,经常会产生误判,无法达到实际可商用的程度,本发明具有很高的实用价值,并且应用诸多应用场景,无需单独投资。
附图说明
22.图1是本发明的基于人工智能的rfid标签移动方向判定方法的流程图;
23.图2是本发明中rfid标签移动方向判定的具体流程;
24.图3是本发明中2x2天线布局(顶置)的结构示意图;
25.图4是本发明中1x4天线布局的结构示意图;
26.图5是本发明中2x2天线布局(侧置)的结构示意图。
具体实施方式
27.下面将结合附图对本发明作进一步说明。
28.请参阅图1-2,本发明的基于人工智能的rfid标签移动方向判定方法,包括下列步骤:
29.一、设定多个rfid天线和移动方向,按每个移动方向移动多个rfid标签,读取每次各个rfid标签上报的数据,获取训练数据集。具体地,
30.1)将读卡器设为训练模式,固定好rfid天线位置,确定训练用的rfid标签。
31.2)训练模式中,设定标签的移动方向为“方向1”。
32.3)移动标签,并完成rfid标签数据读取和记录。
33.4)重复3),直至完成若干组的标签数据和设定方向的绑定。
34.5)训练模式中,设定标签的移动方向为“方向2”。
35.6)移动标签,并完成rfid标签数据读取和记录。
36.7)重复5),直至完成若干组的标签数据和设定方向的绑定。
37.单次每个rfid标签上报的数据,包括:每相邻两个rfid天线之间读卡的时间差以及各rfid标签信号的特征值。具体如下:
[0038][0039]
其中,t为rfid天线之间读卡的时间差,若天线之间的轮询间隔为0.1秒,则t1为0,t2为0.1,t3为0.2,t4为0.3,该数值可由读卡记录的时间戳计算得来。rssi、ms_csr、nb_rssi、wb_rssi_other、phase为标签rfid信号的特征值。得到若干组(如500组)上述的数据之后,根据设定的判定值“方向1”进行学习和训练。
[0040]
二、根据训练数据集进行机器学习,获取决策模型。
[0041]
如果输出的判定值只有两个方向,则用二分类函数(诸如sigmoid或者tanh)进行
回归分析和输出;
[0042]
如果输出的判定值大于两个,使用多分类函数(诸如softmax)进行回归分析和输出。
[0043]
三、读取待决策rfid标签的数据,并利用决策模型判定待决策rfid标签的移动方向。
[0044]
如图3-5所示,本发明的基于人工智能的rfid标签移动方向判定系统,包括:一组rfid天线、多个rfid标签以及连接各rfid天线的读卡器。图中,ant1-ant4表示4个rfid天线。
[0045]
读卡器包括:读卡模块、训练模块和决策模块。
[0046]
读卡模块读取rfid标签上报的数据,获取训练数据集和待决策rfid标签的数据。训练模块根据训练数据集进行机器学习,获得决策模型。决策模块载入决策模型,根据待决策rfid标签的数据判定待决策rfid标签的移动方向。
[0047]
rfid天线的数量≥4个,优选为4个,天线以圆极化天线为优;排列方式随机,但读卡时位置相对固定。
[0048]
读卡器读卡方式为轮询方式,每个天线的读卡周期为50~200ms,优选100ms;rfid标签,数量5~10个;
[0049]
移动方向建议不超过4个,以2个为优;
[0050]
决策模型支持校验模式,可以对准确性进行校验。校验模式下,对于参数和决策模型的修正。不同场景下上报的rfid参数的选择,可以针对不同工业场景下选择不同的参数进行训练。支持多决策模型,在不同的场景下选择不同的模型。本发明支持预设模型,也支持外部新增的输入判定,如超声移动感应或者震动传感器,可设定权重,来校准输出结果。
[0051]
在标签移动的过程中,如在生产制造型企业内,可通过上述的方法进行移动方向的判定,为自动化物流提供可靠的数据输入。本发明不仅限于标签的移动方向,也可以作为标签在位于某个位置区间内或者不在的判定,或者有若干个不同位置的判定。由于标签数据的数据量很小,训练规模很小,本发明通常不需要很高的算力,在很多低端的设备上也可以进行学习和决策。
[0052]
综上,本发明可以通过应用人工智能的方法,通过机器学习来判定rfid标签的移动方向或者位置,本发明对硬件配置的要求不高,有很大的成本优势。
[0053]
以上实施例仅供说明本发明之用,而非对本发明的限制,有关技术领域的技术人员,在不脱离本发明的精神和范围的情况下,还可以作出各种变换或变型,因此所有等同的技术方案也应该属于本发明的范畴,应由各权利要求所限定。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。