1.本发明属于水下滑翔机结构设计领域,涉及一种可应用于翼身融合水下滑翔机结构设计的参数化方法。
背景技术:
2.水下滑翔机(underwater glider)是一种新型的水下机器人。由于其能源消耗极小(仅在调整净浮力和姿态角时消耗少量能源),且效率高、续航力大和可重复使用等特点,在海洋探索中发挥了巨大作用,广泛应用于生物海洋学,战术海洋学,长周期、大范围海洋侦察和搜索,以及航行辅助等(庞重光,连喜虎,俞建成.水下滑翔机的海洋应用[j].海洋科学,2014(4):96-100.)。翼身融合水下滑翔机(blended-wing-body underwater glider,bwbug),是一种机身主体与机翼平滑地融为一体的水下航行器,依靠净浮力和质心位置的调节实现滑翔。这种滑翔机的流体动力特性和载荷承载能力由于其独特的翼身融合布局而尤为突出。
[0003]
参数化设计是当今流行的一种设计方式,其将工程本身编写为函数与过程,通过修改初始条件并经计算机计算得到工程结果的设计过程,实现设计过程的自动化。参数化设计可以大大提高模型的生成和修改的速度。
[0004]
国内对水下滑翔机的研究起步较晚,且大多针对于滑翔机的外形设计,鲜有涉及其结构设计,而结构对其的影响又是重大的。将结构设计与现有成熟的参数化方法相结合,使得参数化涉及变量具有明确意义,可以极大提高其设计效率与设计精度。
技术实现要素:
[0005]
要解决的技术问题
[0006]
为了避免现有技术的不足之处,本发明提出一种可应用于翼身融合水下滑翔机结构设计的参数化方法,解决现有翼身融合水下滑翔机结构如何进行参数化的问题,填补目前国内对此模块研究的欠缺。同时使得参数化涉及变量具有明确意义,为后续参数优化提供了便利。
[0007]
技术方案
[0008]
一种可应用于翼身融合水下滑翔机结构设计的参数化方法,其特征在于步骤如下:
[0009]
步骤1:根据翼身融合水下滑翔机的结构设计与其外形设计的平面形状和截面形状,得到参数化外形的样条曲线的基本数据;按照建模软件的指定路径中读入剖面线和前、后端两条引导线ubline、lbline;记滑翔机半展长为l,最大宽度为d,定义展长方向为z方向,宽度方向为x方向;
[0010]
步骤2:滑翔机的结构设计分为两个部分:机身结构和机翼结构,以比例为n0划定机身和机翼两部分,即机身机翼分界位置位于n0*l原点处;
[0011]
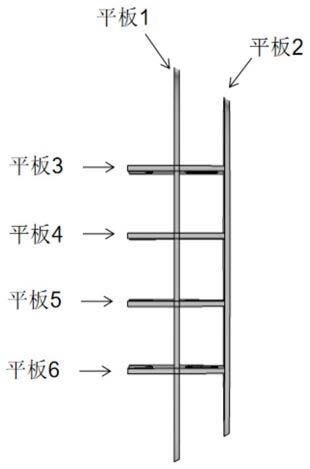
步骤3:沿滑翔机展长方向的平板选取为两块,沿宽度方向的平板取为四块;
[0012]
选取机身部分长度的一半和机身总长度作为滑翔机沿展长方向平板的放置位置;
[0013]
所述平板为矩形,沿展长方向和宽度方向放置;
[0014]
步骤4:机身部分沿宽度方向的平板的厚度为t1,每块平板为四个坐标,沿宽度方向两块平板的坐标,将其命名为第一平板1和第二平板2,将得到的坐标存放于矩形坐标p中;
[0015]
步骤5:机身部分沿展长方向的平板位置由第一平板1和第二平板2决定,第一平板1、第二平板2对应的两个截面的前端x坐标的最大值与后端x坐标的最小值的差值为相对长度,取该长度的1/4分别插入四个沿展长方向的平板,此平板厚度为t2。将得到的四个平板的坐标存放于矩形坐标p中;
[0016]
步骤6:在机身部分生成两个圆柱,第一个圆柱圆点为坐标原点,半径为r1;第二个圆柱圆点为两块平板距离的中点,半径为r2;r1和r2根据设计设定;由此得到机身部分所需坐标;
[0017]
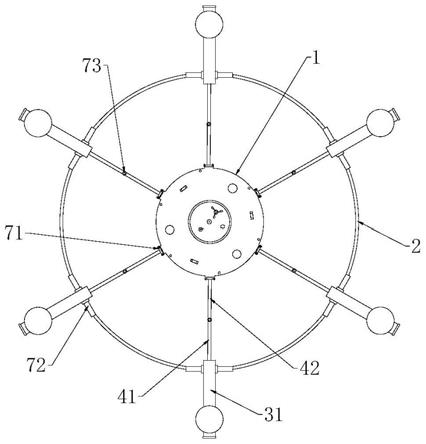
步骤7:滑翔机机翼部分由八根杆组成,第一杆1位于机身和机翼分界处,厚度为t3,根据滑翔机宽度得到第一杆1的x坐标,由第一杆1所处位置得到其z坐标,将此坐标存放于矩形坐标p中;
[0018]
步骤8:滑翔机机翼前端的杆即第二杆2,根据滑翔机外形前端样条曲线ubline生成,第二杆2距滑翔机外形的距离为t4,杆的厚度为t5;在滑翔机外形前端曲线的基础上向x正方向偏置t4得到偏置曲线line1,再将line1向x正方向偏置t5得到偏置曲线line2;
[0019]
步骤9:滑翔机机翼后端的杆即第三杆3,厚度为t6;根据滑翔机外形后端样条曲线lbline生成;首先在滑翔机外形后端曲线的基础上向x正方向偏置t7得到偏置曲线line3,在滑翔机外形后端曲线的基础上向x负方向偏置t6得到偏置曲线line4;
[0020]
步骤10:机翼第四杆4与第一杆1平行,第四杆4位于滑翔机展长比例为n1,即第四杆4位置位于n1*l处,厚度为t8;第四杆4的前、后端分别到第二杆2、第三杆3为止,将此坐标存放于矩形坐标p中;
[0021]
步骤11:机身的第五杆5与第一杆1平行,第五杆5位于滑翔机展长的比例为n2,即第五杆5位置位于距原点n2*l处,厚度为t9;第五杆5的前、后端分别到第二杆2、第三杆3为止。将此坐标存放于矩形坐标p中;
[0022]
步骤12:机身的第六杆6与第一杆1平行,杆6位于滑翔机展长的比例为n3,即第六杆6位置位于距原点n3*l处,厚度为t10;第六杆6的前、后端分别到第二杆2、第三杆3为止,将此坐标存放于矩形坐标p中;
[0023]
步骤13:机身的第七杆7连接第一杆1与第四杆4,厚度为t11;杆7的左端点位于line2与line4的相对长度的比例为n4;右端位于第四杆4长度的比例为n5,将此坐标存放于矩形坐标p中;
[0024]
步骤14:机身的第八杆8位于第七杆7下端,与z轴平行,连接第一杆1和第四杆4,厚度为t12;第八杆8右端端点位于第四杆4长度的比例为n6;左端端点与其一致;将此坐标存放于矩形坐标p中;
[0025]
至此,机翼部分所需坐标已全部获得。
[0026]
一种利用所述的可应用于翼身融合水下滑翔机结构设计的参数化得到翼身融合水下滑翔机的结构的方法,其特征在于:在建模软件中导入步骤1中生成的滑翔机几何外
形,建立一个小于滑翔机高度的xz工作平面;在此工作平面上导入矩形坐标p中的矩形坐标,将每四个坐标选中,生成相应的实体;再将line1、line2、line3和line4导入,分别连接line1和line2前后两个端点,line3和line4前后两个端点,将line1、line2和连接端点的两条直线生成实体,将line3、line4和连接端点的两条直线生成实体,拉伸整个工作平面与滑翔机外形求得交集;在第二个工作平面,即zy平面上,生成机身部分的两个圆形,将其拉伸生成圆柱,并与上述交集求差,即得到翼身融合水下滑翔机的结构。
[0027]
有益效果
[0028]
本发明提出的一种可应用于翼身融合水下滑翔机结构设计的参数化方法,将滑翔机参数化结构与外形相结合。由自定义比例划分滑翔机机身和机翼,根据放置机身平板的参数和平板厚度得到平板坐标,再设定机身的圆柱位置和半径。由滑翔机外形得到组成滑翔机机翼前后两端的杆的线,再由机翼的设计参数得到生成机翼的杆的坐标。将所有得到的坐标储存。将上述坐标和线组合,形成滑翔机结构的平面结构。将滑翔机外形与拉伸后的平面结构相交,再将机身处圆柱减去,可得到实际的翼身融合水下滑翔机几何结构。
[0029]
本发明可以结合实际情况,有效地参数化翼身融合水下滑翔机等多种类似的结构。本发明不仅大大降低滑翔机结构设计的复杂性,适用范围广泛,为滑翔机结构设计与研究提供有效简便的方法,而且能解决滑翔机结构强度性的参数化问题。
附图说明
[0030]
图1为本发明中机身平板编号及位置示意图;
[0031]
图2为本发明中机身圆柱编号及位置示意图;
[0032]
图3为本发明中机翼组成杆编号及位置示意图;
[0033]
图4为本发明中xz工作平面上由参数化生成的某一翼身融合水下滑翔机几何结构平面示意图;
[0034]
图5为本发明中将几何平面结构拉伸后的滑翔机几何结构与滑翔机外形相交示意图;
[0035]
图6为本发明中将形成的机翼圆柱拉伸后的滑翔机几何结构与滑翔机外形相交示意图;
[0036]
图7为本发明中由参数化生成的某一翼身融合水下滑翔机几何结构示意图;
[0037]
图8为本发明中由参数化生成的某一翼身融合水下滑翔机几何外形与其对应的结构示意图;
[0038]
图9为本发明中由参数化生成的某一翼身融合水下滑翔机整体几何结构示意图;
[0039]
图10为本发明中由参数化生成的某一翼身融合水下滑翔机整体几何外形与对应结构示意图。
具体实施方式
[0040]
现结合实施例、附图对本发明作进一步描述:
[0041]
一种可应用于翼身融合水下滑翔机结构设计的参数化方法,其具体实现步骤为:
[0042]
步骤一:翼身融合水下滑翔机的结构与其外形轮廓有关,自动输入参数化外形的样条曲线。参数化外形的样条曲线是指根据外形的参数化方法所建立的曲线,由剖面线和
两条引导线构成,是生成参数化外形的基础。确定参数化外形的样条曲线的基本数据,在指定路径中自动读入剖面线和前、后端两条引导线ubline、lbline,建模软件根据样条曲线进行参数化建模生成滑翔机外形,并保存到指定路径中。记滑翔机半展长为l,最大宽度为d。定义半展长方向为z方向,宽度方向为x方向。
[0043]
步骤二:滑翔机的结构设计分为两个部分:机身部分和机翼部分。两部分结构功能不同,设计不同。故选取一定比例划定机身和机翼两部分,将此比例定为n0,即机身机翼分界位置位于n0*l点处。
[0044]
步骤三:滑翔机机身包括沿滑翔机半展长方向的平板和沿宽度方向的平板。平板数量由使用者自定义,本发明中沿滑翔机半展长方向的平板选取为两块,沿宽度方向的平板取为四块。平板均沿半展长方向和宽度方向均匀放置。首先选取机身部分长度的一半和机身总长度作为沿宽度方向平板的放置位置。即c1和c2,其中c2=c1/2。机身平板编号及位置如图1所示。
[0045]
步骤四:机身部分沿宽度方向的平板的厚度由设计者给出,此处为t1。平板为矩形,每块平板由四个坐标控制。即可得到沿宽度方向两块平板的坐标。因最后是采取生成的骨架结构与原滑翔机外形相交的方式生成实际的骨架结构,故平板1和平板2在x方向上的相对坐标只需比滑翔机宽度大即可。即平板1的坐标为(-1,c2-t1),(d 2,c2-t1),(d 2,c2),(-1,c2);平板2的坐标为(-1,c1-t1),(d 2,c1-t1),(d 2,c1),(-1,c1)。将得到的坐标存入矩形坐标p中。
[0046]
步骤五:机身部分沿展长方向的平板位置由上述平板1和平板2决定。平板1、2对应的两个截面的前端x坐标的较大值与后端x坐标的较小值的差值为相对长度,取该长度的1/4分别插入四个沿展长方向的平板,此时平板厚度为t2。平板1、2前、后端分别到滑翔机外形轮廓为止。由此计算得到平板1、2平面位置的各自对应的四个端点坐标。记为平板1、平板2前端的x坐标xu1、xu2。平板1和平板2后端的x坐标为xl1、xl2。取xu1和xu2中的较大值记为xunew,取yl1和yl2中较小的值几位xlnew,相对长度l为xlnew与xunew的差值。在相对长度l中均匀地插入四块平板。此时平板厚度为t2。即四块平板的坐标分别为:平板3:(yunew l/5,0),(yunew l/5 t2,0),(yunew l/5 t2,c1-t1),(yunew l/5,c1-t1);平板4:(yunew 2*l/5,0),(yunew 2*l/5 t2,0),(yunew 2*l/5 t2,c1-t1),(yunew 2*l/5,c1-t1);平板5:(yunew 3*l/5,0),(yunew 3*l/5 t2,0),(yunew 3*l/5 t2,c1-t1),(yunew 3*l/5,c1-t1);平板6:(yunew 4*l/5,0),(yunew 4*l/5 t2,0),(yunew 4*l/5 t2,c1-t1),(yunew 4*l/5,c1-t1)。将此坐标存放于p中。
[0047]
步骤六:在机身部分生成两个圆柱。第一个圆柱圆点为坐标原点,即(0,0,0),半径取r1;第二个圆柱圆点为两块平板距离的中点,即(0,0,c2 ((c1-t1-c2))/2),半径取r2。机身圆柱编号及位置如图2所示。
[0048]
步骤七:滑翔机机翼组成杆编号及位置如图3所示。滑翔机机翼部分首先在机身和机翼分界的位置向z正方向拉伸生成厚度为t3的杆。与平板1和平板2一样,杆1在x方向上的相对坐标只需比滑翔机宽度大即可。为防止在最终建模求交集的过程中产生几何建模错误,故本发明在此处在杆1靠近原点的两个端点的z坐标将原本的c1改为c1-t1/2。即杆1(g1)的四个平面坐标为(-1,c1-t1/2),(d 2,c1-t1/2),(d 2,c1 t3),(-1,c1 t3),将得到的坐标存入矩形坐标p中。
[0049]
步骤八:滑翔机机身前端的杆由滑翔机外形前端样条曲线ubline生成偏置曲线line1和line2得到。定义前端的杆缩进厚度为t4,杆的厚度为t5。在滑翔机外形前端曲线的基础上向x正方向偏置t4的距离得到偏置曲线line1,再将line1向x正方向偏置t5的距离得到偏置曲线line2。至此,line1和line2构建完毕。
[0050]
步骤九:滑翔机机翼后端的杆由滑翔机外形后端样条曲线lbline生成偏置曲线line3和line4得到。首先在滑翔机外形后端曲线的基础上向x正方向偏置t7得到偏置曲线line3,在滑翔机外形后端曲线的基础上向x负方向偏置t6得到偏置曲线line4。
[0051]
步骤十:杆4与杆1平行,其左端面位于距原点n1*l处,厚度为t8,即其右端面位于距原点n1*l t8处,前、后端分别到杆2、杆3为止。由此计算得到杆4平面位置的四个端点坐标,将得到的坐标存入矩形坐标p中。
[0052]
步骤十一:杆5与杆1平行,其左端面位于距原点n2*l处,厚度为t9,即其右端面位于距原点n2*l t9处,前、后端分别到杆2、杆3为止。由此计算得到杆5平面位置的四个端点坐标,并存放于p中。
[0053]
步骤十二:杆6与杆1平行,其左端面位于距原点n3*l处,厚度为t10,即其右端面位于距原点n3*l t10处,前、后端分别到杆2、杆3为止。由此计算得到杆6平面位置的四个端点坐标,并存放于p中。
[0054]
步骤十三:机身的杆7连接杆1与杆4,定义此杆厚度为t11。杆7的左端面位于line2与line4的相对长度的一定比例处,定义此比例为n4。定义line2线段靠近原点的第一个点的x坐标为p3,即p3=line2(1,1);定义line4线段靠近原点的第一个点的x坐标为p4,即p4=line4(1,1)。杆7左端面两个端点的x坐标为:p3 (p4-p3)*n4、p3 (p4-p3)*n4 t11。右端面位于杆4一定比例的长度处,定义此比例为n5。杆4靠近原点的前端点的x坐标为xu4,后端点的x坐标为xl4,则杆7右端面的两个端点x坐标为xu4 (xl4-xu4)*n5、xu4 (xl4-xu4)*n5 t11。将得到的坐标存入矩形坐标p中。
[0055]
步骤十四:机身的杆8位于杆7下端,与z轴平行,连接杆1和杆4,定义此杆厚度为t12。杆8右端面位于杆4长度的一定比例处,定义此比例为n6;则杆8右端面两个端点的x坐标为xu4 (xl4-xu4)*n6、xu4 (xl4-xu4)*n6 t12。左端端点与其x坐标一致。将得到的坐标存入矩形坐标p中。
[0056]
步骤十五:在建模软件中导入步骤一中生成的滑翔机几何外形。建立一个小于滑翔机高度的xz工作平面。在此工作平面上导入p中的矩形坐标,将每四个坐标选中,生成相应的实体。再将line1、line2、line3和line4导入,分别连接line1和line2前后两个端点,line3和line4前后两个端点,将line1、line2和连接端点的两条直线生成实体,将line3、line4和连接端点的两条直线生成实体。由此,xz工作平面上水下滑翔机几何结构平面如图4所示。拉伸整个工作平面与滑翔机外形求得交集,拉伸后的几何结构与滑翔机外形如图5所示。在第二个新的工作平面,即zy平面上,生成机身部分的两个圆形,将其拉伸生成圆柱,如图6所示。将圆柱与上述交集求差,即可得到翼身融合水下滑翔机的结构,如图7所示。滑翔机几何外形与其对应的结构示意图如图8所示。
[0057]
由参数化生成的某一翼身融合水下滑翔机整体几何结构示意图如图9所示;其整体几何外形与对应结构示意图如图10所示。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。