1.本发明涉及船舶与海洋工程领域,具体为一种具有波浪补偿功能的海上廊桥多模态实验系统及其工作方法,可用于多种海上廊桥的实验研究。
背景技术:
2.随着海洋经济的发展,海上风电开启了巨大发展空间。海上风电平台承载许多设备设施,需要大量、持续的运行和维护工作支持,这就需要向海上风电平台进行运维人员及物资转运,通过装备有海上廊桥的运维船进行转运作业是较为安全、便捷的。而运维船会受到风、浪、流等海洋环境的影响,产生横摇、纵摇、艏摇、横荡、纵荡和升沉等六个自由度的运动,这些摇荡运动会对人员换乘及物资转运造成安全隐患,因而需要具有波浪补偿功能的海上廊桥连接运维船与海上风电平台,保障人员换乘及物资转运的安全,考虑到运维船安装有动力定位系统,因而可忽略运维船的横荡、纵荡和艏摇运动对海上廊桥的影响,海上廊桥只需补偿运维船的横摇、纵摇和升沉运动。由于海上风电平台的形式、规模、工况和所处海域等的不同,对海上廊桥的载荷、规格尺寸、运动方式、补偿精度等提出了不同要求,会需要各种不同类型的波浪补偿海上廊桥。
3.中国发明专利cn105408199b公开了一种用于提供对铰接式舷梯的主动运动补偿控制的设备和方法,该设备具有驱动舷梯回转运动的回转致动器、俯仰运动的吊臂致动器和伸缩运动的拉伸致动器,可使舷梯实现三自由度运动,补偿船舶运动,可用于船舶之间或船舶与固定设施之间的人员运送。
4.中国发明专利cn107434010b公开了一种电动的海浪主动补偿登乘系统及其控制方法,该系统包括横滚补偿机构、俯仰补偿机构、伸缩补偿机构、位姿检测系统、运动控制系统和电气系统,可主动补偿海浪引起的船舶三自由度运动,用于保障维修人员安全可靠地从船上走上海上风机平台。
5.中国发明专利cn113232768a公开了一种具有波浪补偿功能的海上换乘栈桥及其工作方法,具有驱动升沉运动的第一液压缸、回转运动的第一液压马达、俯仰运动的第三液压马达和伸缩运动的第二液压马达四个驱动机构,可使栈桥补偿海浪引起的船舶横摇、纵摇和升沉运动,并还能保证栈桥桥体与水平面保持固定安全角度不变,可用于人员在海上两艘靠帮船舶之间进行安全换乘。
6.上述三个专利所述的舷梯、登乘系统和换乘栈桥为三种不同类型的廊桥,分别适用于不同场合、为不同尺寸的实际廊桥,均没有述及廊桥系统的实验测试。如果要开发廊桥,进行这些不同类型廊桥的试验验证是必要环节。
7.南通中远海运船务工程有限公司刘鹏在《船海工程》vol.49,no.4(2020年第4期)上发表的题为“一种大型海工栈桥的码头试验方法”的论文,提出一种实际的栈桥通过岸吊或浮吊的模拟测试方案,码头吊或浮吊的吊钩下面挂一根专门设计的吊梁,吊梁上带有一块面积略大于栈桥着陆锥的钢板来模拟目标平台,对栈桥的伸缩、变幅与回转补偿功能进行测试,此试验方案对尚未经过实船应用验证的新型栈桥,在试验过程中可能与目标平台
发生碰撞,造成栈桥的损伤,试验风险较大。
技术实现要素:
8.为解决现有技术存在的上述问题,本发明要提供一种波浪补偿海上廊桥多模态实验系统及其工作方法,可在实验室完成廊桥补偿功能测试,降低实验风险,并降低海上廊桥的开发成本。
9.为了实现上述目的,本发明的技术方案如下:一种波浪补偿海上廊桥多模态实验系统,包括升降模块、回转模块、平衡模块、俯仰伸缩模块、模拟平台和波浪补偿控制系统;
10.所述的升降模块为升降机构,包括底座、内基座、外基座和升降驱动器;所述外基座为方管;所述内基座为上端封口的方管,嵌套在外基座内、并与外基座滑动连接;所述升降驱动器的一端与内基座的上端封口面固定连接,另一端与底座固定连接,驱动内基座沿着外基座上下运动;
11.所述的回转模块为回转机构,包括回转驱动器、顶板和底板,所述回转驱动器的下部固定安装在底板上,回转驱动器的上部与顶板连接;所述回转驱动器驱动顶板旋转。
12.所述的平衡模块为平衡机构,包括第一平衡驱动器、第二平衡驱动器、支撑件、上板和下板,所述第一平衡驱动器的上端通过球铰与上板连接、下端通过转动副与下板连接,第二平衡驱动器的上端通过球铰与上板连接、下端通过转动副与下板连接,支撑件的上端通过转动副与上板连接、下端与下板固定连接;所述第一平衡驱动器、支撑件和第二平衡驱动器并排安装在上板与下板之间,且支撑件位于第一平衡驱动器和第二平衡驱动器之间;
13.所述的俯仰伸缩模块包括俯仰机构、伸缩机构和转运甲板,所述俯仰机构和伸缩机构安装在转运甲板上;
14.所述的俯仰机构包括球铰、转动副、转动轴和俯仰驱动器;所述俯仰驱动器的下端通过转动副与转运甲板连接、上端通过球铰与固定梯架的短臂外端连接;所述俯仰驱动器驱动固定梯架绕转动轴转动;
15.所述的伸缩机构包括固定梯架、可伸缩梯架、滑动装置和伸缩驱动器;所述伸缩驱动器的固定端固定在固定梯架上、移动端与可伸缩梯架连接,所述滑动装置固定安装在固定梯架上并与可伸缩梯架滑动连接;所述固定梯架为“l”形梯架,固定梯架的短臂朝上,拐角部通过转动轴安装在转运甲板上;所述伸缩驱动器驱动可伸缩梯架通过滑动装置沿固定梯架移动;
16.所述模拟平台用于模拟运维船的运动;
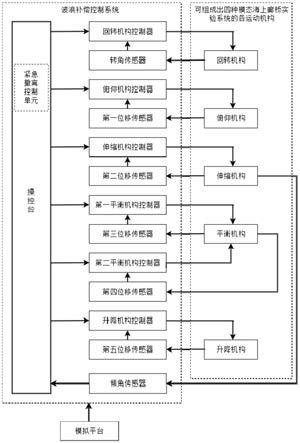
17.所述的波浪补偿控制系统包括转角传感器、倾角传感器、第一位移传感器、第二位移传感器、第三位移传感器、第四位移传感器、第五位移传感器、回转控制器、俯仰控制器、伸缩控制器、第一平衡驱动器控制器、第二平衡驱动器控制器、升降控制器、操控台、工业控制计算机和紧急撤离控制单元;
18.所述的转角传感器用于测量回转机构的实际转角;倾角传感器用于测量可伸缩梯架与水平面所成的实际夹角;第一位移传感器、第二位移传感器、第三位移传感器、第四位移传感器和第五位移传感器分别用于测量俯仰驱动器、伸缩驱动器、第一平衡驱动器、第二平衡驱动器和升降驱动器的实际伸缩位移;
19.所述的操控台由人机交互界面、按钮、操纵手柄和控制柜组成;所述人机交互界面
具有以下功能:设置海上廊桥的模态类别、海上廊桥可伸缩梯架尖端点与海上风电平台的搭接位置、海上廊桥各运动机构中位的位置、海上廊桥各运动机构的限位、各运动控制器的相关参数、可伸缩梯架尖端点的期望位置、海上廊桥可伸缩梯架与水平面的期望夹角以及海况参数,显示海上廊桥实验系统各输入输出信号自检结果、各种异常情况的警报、可伸缩梯架尖端点期望位置和实际位置、可伸缩梯架与水平面所成的期望夹角和实际夹角、回转机构期望转角和实际转角,显示俯仰驱动器、伸缩驱动器、第一平衡驱动器、第二平衡驱动器和升降驱动器的期望伸缩位移和实际的伸缩位移,保存实验结果;按钮安装在操控台台面上,用于海上廊桥实验系统初始化,使其各运动机构运行至中位,用于海上廊桥实验系统启、停操作;操纵手柄安装在操控台台面上,用于手动操控海上廊桥;控制柜内安装工业控制计算机;
20.所述的工业控制计算机运行控制算法,实现对各运动控制器的控制;
21.所述回转模块、俯仰伸缩模块、模拟平台和波浪补偿控制系统构成第一模态海上廊桥实验系统,所述回转模块固定安装在模拟平台上,所述俯仰伸缩模块固定安装在回转模块上;
22.所述回转模块、俯仰伸缩模块、平衡模块、模拟平台和波浪补偿控制系统构成第二模态海上廊桥实验系统,所述回转模块固定安装在模拟平台上,所述平衡模块固定安装在回转模块上;所述俯仰伸缩模块固定安装在平衡模块上;
23.所述回转模块、俯仰伸缩模块、升降模块、模拟平台和波浪补偿控制系统构成第三模态海上廊桥实验系统,所述升降模块固定安装在模拟平台上,所述回转模块固定安装在升降模块上;所述俯仰伸缩模块固定安装在回转模块上;
24.所述回转模块、俯仰伸缩模块、升降模块、平衡模块、模拟平台和波浪补偿控制系统构成第四模态海上廊桥实验系统,所述升降模块固定安装在模拟平台上,所述回转模块固定安装在升降模块上;所述平衡模块固定安装在回转模块上;所述俯仰伸缩模块固定安装在平衡模块上;
25.整个试验系统模块与模块之间通过螺栓固定连接,模块与模拟平台之间通过螺栓固定连接,并通过磁性元件配合辅助定位。
26.所述的紧急撤离控制单元在接收到紧急撤离信号时,输出自动执行紧急撤离操作程序的控制信号给俯仰机构和伸缩机构,实现紧急情况下的安全撤离,保证人员安全。
27.一种波浪补偿海上廊桥多模态实验系统的工作方法,包括以下步骤:
28.a、选择海上廊桥的模态类别
29.通过操控台上的人机交互界面选择海上廊桥的模态类别,如果是第一模态,则转步骤b;如果是第二模态,则转步骤c;如果是第三模态,则转步骤d;如果是第四模态,则转步骤e;否则,待机;
30.b、运行第一模态海上廊桥实验系统
31.第一模态海上廊桥实验系统的运行步骤如下:
32.b1、工业控制计算机接收来自模拟平台的升沉位移、纵摇角和横摇角,并根据所设置的可伸缩梯架尖端点的期望位置,计算出补偿模拟平台的摇荡运动所需的回转驱动器的期望转角、俯仰驱动器和伸缩驱动器的期望伸缩位移;所述摇荡运动包括横摇运动、纵摇运动和升沉运动;
33.b2、回转控制器接收来自于转角传感器测得的回转模块实际转角,并根据它的期望值,输出控制信号给回转驱动器,驱动回转机构运动;
34.b3、俯仰控制器接收来自于第一位移传感器测得的俯仰驱动器实际位移,并根据它的期望值,输出控制信号给俯仰驱动器,驱动俯仰机构运动;
35.b4、伸缩控制器接收来自于第二位移传感器测得的伸缩驱动器实际位移,并根据它的期望值,输出控制信号给伸缩驱动器,驱动伸缩机构运动;
36.b5、回转机构、俯仰机构和伸缩机构共同补偿模拟平台的横摇、纵摇和升沉运动,保证海上廊桥可伸缩梯架尖端点相对于空间中某一点静止,从而保证可伸缩梯架尖端点与海上风电平台安全搭接;当它们搭接并固定连接后,波浪补偿控制系统不再对回转机构、俯仰机构和伸缩机构实施主动控制;
37.b6、若遇到需紧急撤离情况,转步骤b7,否则转步骤b8;
38.b7、启动紧急撤离控制单元;
39.b8、若继续实验,转步骤b1,否则结束实验;
40.c、运行第二模态海上廊桥实验系统
41.第二模态海上廊桥实验系统的运行步骤如下:
42.c1、同步骤b1;
43.c2、同步骤b2;
44.c3、同步骤b3;
45.c4、同步骤b4;
46.c5、同步骤b5;
47.c6、工业控制计算机根据所接收的模拟平台纵摇角和横摇角,计算出为使平衡机构顶板始终保持水平的、补偿模拟平台纵摇和横摇运动所需的两个平衡驱动器的期望位移量;
48.c7、第一平衡控制器和第二平衡控制器分别接收来自于第三位移传感器和第四位移传感器测得的第一平衡驱动器和第二平衡驱动器的实际伸缩位移,并根据它们的期望值,输出控制信号给第一平衡驱动器和第二平衡驱动器,驱动平衡机构运动,使平衡机构顶板始终保持水平,从而保证转运甲板与水平面平行、固定梯架不发生左右倾斜;
49.c8、若遇到需紧急撤离情况,转步骤c9,否则转步骤c10;
50.c9、启动紧急撤离控制单元;
51.c10、若继续实验,转步骤c6,否则结束实验;
52.d、运行第三模态海上廊桥实验系统
53.第三模态海上廊桥实验系统的运行步骤如下:
54.d1、同步骤b1;
55.d2、同步骤b2;
56.d3、同步骤b3;
57.d4、同步骤b4;
58.d5、同步骤b5;
59.d6、工业控制计算机根据所接收的模拟平台横摇角、纵摇角和升沉位移、海上廊桥升降机构的基座在模拟平台上的安装位置、海上廊桥可伸缩梯架尖端点与海上风电平台的
搭接位置、升降驱动器的当前伸缩位移、所设置的升降机构的中位位置和可伸缩梯架与水平面的期望夹角,计算出为使可伸缩梯架与水平面的夹角保持不变的、补偿模拟平台的摇荡运动所需的升降驱动器的期望伸缩位移;
60.d7、升降控制器接收来自于第五位移传感器测得的升降驱动器实际伸缩位移,并根据它的期望值,输出控制信号给升降驱动器,驱动升降机构运动,保证可伸缩梯架与水平面的夹角保持不变,使得当运维船甲板和海上风电平台存在高度差时仍能保证人员换乘与物资转运的安全;
61.d8、若遇到需紧急撤离情况,转步骤d9,否则转步骤d10;
62.d9、启动紧急撤离控制单元;
63.d10、若继续实验,转步骤d6,否则结束实验;
64.e、运行第四模态海上廊桥实验系统
65.第四模态海上廊桥实验系统的运行步骤如下:
66.e1、同步骤b1;
67.e2、同步骤b2;
68.e3、同步骤b3;
69.e4、同步骤b4;
70.e5、同步骤b5;
71.e6、工业控制计算机根据所接收的模拟平台的横摇角、纵摇角和升沉位移、海上廊桥升降机构的基座在模拟平台上的安装位置、海上廊桥可伸缩梯架尖端点与海上风电平台的搭接位置、升降驱动器的当前伸缩位移、所设置的升降机构的中位位置和可伸缩梯架与水平面的期望夹角,计算出为使平衡机构顶板始终保持水平的、补偿模拟平台横摇和纵摇运动所需的两个平衡驱动器的期望位移量,计算出为使可伸缩梯架与水平面的夹角保持不变的、补偿模拟平台的摇荡运动所需的升降驱动器的期望伸缩位移;
72.e7、第一平衡控制器和第二平衡控制器分别接收来自于第三位移传感器和第四位移传感器测得的第一平衡驱动器和第二平衡驱动器的实际伸缩位移,并根据它们的期望值,输出控制信号给第一平衡驱动器和第二平衡驱动器,驱动平衡机构运动,使平衡机构顶板始终保持水平,从而保证转运甲板与水平面平行、固定梯架不发生左右倾斜;同时,升降控制器接收来自于第五位移传感器测得的升降驱动器实际伸缩位移,并根据它的期望值,输出控制信号给升降驱动器,驱动升降机构运动,保证可伸缩梯架与水平面的夹角保持不变,使得当运维船甲板和海上风电平台存在高度差时仍能保证人员换乘与物资转运的安全;
73.e8、若遇到需紧急撤离情况,转e9,否则转e10;
74.e9、启动紧急撤离控制单元;
75.e10、若继续实验,转e6,否则结束实验。
76.与现有技术相比,本发明具有以下有益效果:
77.1、本发明基于缩尺海上廊桥和模拟平台,采用模块化结构设计建立的这种波浪补偿海上廊桥多模态实验系统及其工作方法,可在实验室内方便、快捷地进行不同类型廊桥的各种波浪补偿控制方案的实验验证,为海上测试和实船应用提供充分保证,风险低,且缩短海上廊桥研制周期,具有很好的便捷性、安全性、可靠性和经济性。
78.2、本发明的人机交互界面,可以设置海上廊桥实验系统必要的相关参数,实时显示和保存实验结果,实验系统还设有操纵手柄,具有灵活、友好、便于用户顺利地进行实验操作的特点,为分析各种控制算法的优缺点提供实验依据。
79.3、本发明具有模块化结构、便于组装的特点,通过不同的组装方式,可以获得四种模态不同类型的海上廊桥实验系统,基于此,可降低海上廊桥的开发成本,取得巨大的社会和经济效益。
附图说明
80.图1为本发明的俯仰伸缩模块示意图。
81.图2为本发明的平衡模块示意图。
82.图3为本发明的回转模块示意图。
83.图4为本发明的升降模块示意图。
84.图5为本发明的第一模态廊桥示意图。
85.图6为本发明的第二模态廊桥示意图。
86.图7为本发明的第三模态廊桥示意图。
87.图8为本发明的第四模态廊桥示意图。
88.图9为本发明的波浪补偿控制系统原理图。
89.图中:1、俯仰伸缩模块,2、平衡模块,3、回转模块,4、升降模块,11、俯仰驱动器,12、转运甲板,13、转动轴,14、固定梯架,15、伸缩驱动器,16、滑动装置,17、可伸缩梯架,21、下板,22、第一平衡驱动器,23、支撑件,24、第二平衡驱动器,25、上板,31、底板,32、回转驱动器,33、顶板,41、升降驱动器,42、底座,43、外基座,44、内基座。
具体实施方式
90.以下结合实例及附图对本发明作进一步详述。如图1-9所示,一种波浪补偿海上廊桥多模态实验系统,包括升降模块4、回转模块3、平衡模块2、俯仰伸缩模块1、模拟平台和波浪补偿控制系统;
91.所述的升降模块4为升降机构,包括底座42、内基座44、外基座43和升降驱动器41;所述外基座43为方管;所述内基座44为上端封口的方管,嵌套在外基座43内、并与外基座43滑动连接;所述升降驱动器41的一端与内基座44的上端封口面固定连接,另一端与底座42固定连接,驱动内基座44沿着外基座43上下运动;
92.所述的回转模块3为回转机构,包括回转驱动器32、顶板33和底板31,所述回转驱动器32的下部固定安装在底板31上,回转驱动器32的上部与顶板33连接;所述回转驱动器32驱动顶板33旋转;
93.所述的平衡模块2为平衡机构,包括第一平衡驱动器22、第二平衡驱动器24、支撑件23、上板25和下板21,所述第一平衡驱动器22的上端通过球铰与上板25连接、下端通过转动副与下板21连接,第二平衡驱动器24的上端通过球铰与上板25连接、下端通过转动副与下板21连接,支撑件23的上端通过转动副与上板25连接、下端与下板21固定连接;所述第一平衡驱动器22、支撑件23和第二平衡驱动器24并排安装在上板25与下板21之间,且支撑件23位于第一平衡驱动器22和第二平衡驱动器24之间;
94.所述的俯仰伸缩模块1包括俯仰机构、伸缩机构和转运甲板12,所述俯仰机构和伸缩机构安装在转运甲板12上;
95.所述的俯仰机构包括球铰、转动副、转动轴13和俯仰驱动器11;所述俯仰驱动器11的下端通过转动副与转运甲板12连接、上端通过球铰与固定梯架14的短臂外端连接;所述俯仰驱动器11驱动固定梯架14绕转动轴13转动;
96.所述的伸缩机构包括固定梯架14、可伸缩梯架17、滑动装置16和伸缩驱动器15;所述伸缩驱动器15的固定端固定在固定梯架14上、移动端与可伸缩梯架17连接,所述滑动装置16固定安装在固定梯架14上并与可伸缩梯架17滑动连接;所述固定梯架14为“l”形梯架,固定梯架14的短臂朝上,拐角部通过转动轴13安装在转运甲板12上;所述伸缩驱动器15驱动可伸缩梯架17通过滑动装置16沿固定梯架14移动;
97.所述模拟平台用于模拟运维船的运动;
98.所述的波浪补偿控制系统包括转角传感器、倾角传感器、第一位移传感器、第二位移传感器、第三位移传感器、第四位移传感器、第五位移传感器、回转控制器、俯仰控制器、伸缩控制器、第一平衡驱动器控制器、第二平衡驱动器控制器、升降控制器、操控台、工业控制计算机和紧急撤离控制单元;
99.所述的转角传感器用于测量回转机构的实际转角;倾角传感器用于测量可伸缩梯架17与水平面所成的实际夹角;第一位移传感器、第二位移传感器、第三位移传感器、第四位移传感器和第五位移传感器分别用于测量俯仰驱动器11、伸缩驱动器15、第一平衡驱动器22、第二平衡驱动器24和升降驱动器41的实际伸缩位移;
100.所述的操控台由人机交互界面、按钮、操纵手柄和控制柜组成;所述人机交互界面具有以下功能:设置海上廊桥的模态类别、海上廊桥可伸缩梯架17尖端点与海上风电平台的搭接位置、海上廊桥各运动机构中位的位置、海上廊桥各运动机构的限位、各运动控制器的相关参数、可伸缩梯架17尖端点的期望位置、海上廊桥可伸缩梯架17与水平面的期望夹角以及海况参数,显示海上廊桥实验系统各输入输出信号自检结果、各种异常情况的警报、可伸缩梯架17尖端点期望位置和实际位置、可伸缩梯架17与水平面所成的期望夹角和实际夹角、回转机构期望转角和实际转角,显示俯仰驱动器11、伸缩驱动器15、第一平衡驱动器22、第二平衡驱动器24和升降驱动器41的期望伸缩位移和实际的伸缩位移,保存实验结果;按钮安装在操控台台面上,用于海上廊桥实验系统初始化,使其各运动机构运行至中位,用于海上廊桥实验系统启、停操作;操纵手柄安装在操控台台面上,用于手动操控海上廊桥;控制柜内安装工业控制计算机;
101.所述的工业控制计算机运行控制算法,实现对各运动控制器的控制;
102.所述回转模块3、俯仰伸缩模块1、模拟平台和波浪补偿控制系统构成第一模态海上廊桥实验系统,所述回转模块3固定安装在模拟平台上,所述俯仰伸缩模块1固定安装在回转模块3上;
103.所述回转模块3、俯仰伸缩模块1、平衡模块2、模拟平台和波浪补偿控制系统构成第二模态海上廊桥实验系统,所述回转模块3固定安装在模拟平台上,所述平衡模块2固定安装在回转模块3上;所述俯仰伸缩模块1固定安装在平衡模块2上;
104.所述回转模块3、俯仰伸缩模块1、升降模块4、模拟平台和波浪补偿控制系统构成第三模态海上廊桥实验系统,所述升降模块4固定安装在模拟平台上,所述回转模块3固定
安装在升降模块4上;所述俯仰伸缩模块1固定安装在回转模块3上;
105.所述回转模块3、俯仰伸缩模块1、升降模块4、平衡模块2、模拟平台和波浪补偿控制系统构成第四模态海上廊桥实验系统,所述升降模块4固定安装在模拟平台上,所述回转模块3固定安装在升降模块4上;所述平衡模块2固定安装在回转模块3上;所述俯仰伸缩模块1固定安装在平衡模块2上;
106.整个试验系统模块与模块之间通过螺栓固定连接,模块与模拟平台之间通过螺栓固定连接,并通过磁性元件配合辅助定位;
107.所述的紧急撤离控制单元在接收到紧急撤离信号时,输出自动执行紧急撤离操作程序的控制信号给俯仰机构和伸缩机构,实现紧急情况下的安全撤离,保证人员安全。
108.一种波浪补偿海上廊桥多模态实验系统的工作方法,包括以下步骤:
109.a、选择海上廊桥的模态类别
110.通过操控台上的人机交互界面选择海上廊桥的模态类别,如果是第一模态,则转步骤b;如果是第二模态,则转步骤c;如果是第三模态,则转步骤d;如果是第四模态,则转步骤e;否则,待机;
111.b、运行第一模态海上廊桥实验系统
112.第一模态海上廊桥实验系统的运行步骤如下:
113.b1、工业控制计算机接收来自模拟平台的升沉位移、纵摇角和横摇角,并根据所设置的可伸缩梯架17尖端点的期望位置,计算出补偿模拟平台的摇荡运动所需的回转驱动器32的期望转角、俯仰驱动器11和伸缩驱动器15的期望伸缩位移;所述摇荡运动包括横摇运动、纵摇运动和升沉运动;
114.b2、回转控制器接收来自于转角传感器测得的回转模块3实际转角,并根据它的期望值,输出控制信号给回转驱动器32,驱动回转机构运动;
115.b3、俯仰控制器接收来自于第一位移传感器测得的俯仰驱动器11实际位移,并根据它的期望值,输出控制信号给俯仰驱动器11,驱动俯仰机构运动;
116.b4、伸缩控制器接收来自于第二位移传感器测得的伸缩驱动器15实际位移,并根据它的期望值,输出控制信号给伸缩驱动器15,驱动伸缩机构运动;
117.b5、回转机构、俯仰机构和伸缩机构共同补偿模拟平台的横摇、纵摇和升沉运动,保证海上廊桥可伸缩梯架17尖端点相对于空间中某一点静止,从而保证可伸缩梯架17尖端点与海上风电平台安全搭接;当它们搭接并固定连接后,波浪补偿控制系统不再对回转机构、俯仰机构和伸缩机构实施主动控制;
118.b6、若遇到需紧急撤离情况,转步骤b7,否则转步骤b8;
119.b7、启动紧急撤离控制单元;
120.b8、若继续实验,转步骤b1,否则结束实验;
121.c、运行第二模态海上廊桥实验系统
122.第二模态海上廊桥实验系统的运行步骤如下:
123.c1、同步骤b1;
124.c2、同步骤b2;
125.c3、同步骤b3;
126.c4、同步骤b4;
127.c5、同步骤b5;
128.c6、工业控制计算机根据所接收的模拟平台纵摇角和横摇角,计算出为使平衡机构顶板33始终保持水平的、补偿模拟平台纵摇和横摇运动所需的两个平衡驱动器的期望位移量;
129.c7、第一平衡控制器和第二平衡控制器分别接收来自于第三位移传感器和第四位移传感器测得的第一平衡驱动器22和第二平衡驱动器24的实际伸缩位移,并根据它们的期望值,输出控制信号给第一平衡驱动器22和第二平衡驱动器24,驱动平衡机构运动,使平衡机构顶板33始终保持水平,从而保证转运甲板12与水平面平行、固定梯架14不发生左右倾斜;
130.c8、若遇到需紧急撤离情况,转步骤c9,否则转步骤c10;
131.c9、启动紧急撤离控制单元;
132.c10、若继续实验,转步骤c6,否则结束实验;
133.d、运行第三模态海上廊桥实验系统
134.第三模态海上廊桥实验系统的运行步骤如下:
135.d1、同步骤b1;
136.d2、同步骤b2;
137.d3、同步骤b3;
138.d4、同步骤b4;
139.d5、同步骤b5;
140.d6、工业控制计算机根据所接收的模拟平台横摇角、纵摇角和升沉位移、海上廊桥升降机构的基座在模拟平台上的安装位置、海上廊桥可伸缩梯架17尖端点与海上风电平台的搭接位置、升降驱动器41的当前伸缩位移、所设置的升降机构的中位位置和可伸缩梯架17与水平面的期望夹角,计算出为使可伸缩梯架17与水平面的夹角保持不变的、补偿模拟平台的摇荡运动所需的升降驱动器41的期望伸缩位移;
141.d7、升降控制器接收来自于第五位移传感器测得的升降驱动器41实际伸缩位移,并根据它的期望值,输出控制信号给升降驱动器41,驱动升降机构运动,保证可伸缩梯架17与水平面的夹角保持不变,使得当运维船甲板和海上风电平台存在高度差时仍能保证人员换乘与物资转运的安全;
142.d8、若遇到需紧急撤离情况,转步骤d9,否则转步骤d10;
143.d9、启动紧急撤离控制单元;
144.d10、若继续实验,转步骤d6,否则结束实验;
145.e、运行第四模态海上廊桥实验系统
146.第四模态海上廊桥实验系统的运行步骤如下:
147.e1、同步骤b1;
148.e2、同步骤b2;
149.e3、同步骤b3;
150.e4、同步骤b4;
151.e5、同步骤b5;
152.e6、工业控制计算机根据所接收的模拟平台的横摇角、纵摇角和升沉位移、海上廊
桥升降机构的基座在模拟平台上的安装位置、海上廊桥可伸缩梯架17尖端点与海上风电平台的搭接位置、升降驱动器41的当前伸缩位移、所设置的升降机构的中位位置和可伸缩梯架17与水平面的期望夹角,计算出为使平衡机构顶板33始终保持水平的、补偿模拟平台横摇和纵摇运动所需的两个平衡驱动器的期望位移量,计算出为使可伸缩梯架17与水平面的夹角保持不变的、补偿模拟平台的摇荡运动所需的升降驱动器41的期望伸缩位移;
153.e7、第一平衡控制器和第二平衡控制器分别接收来自于第三位移传感器和第四位移传感器测得的第一平衡驱动器22和第二平衡驱动器24的实际伸缩位移,并根据它们的期望值,输出控制信号给第一平衡驱动器22和第二平衡驱动器24,驱动平衡机构运动,使平衡机构顶板33始终保持水平,从而保证转运甲板12与水平面平行、固定梯架14不发生左右倾斜;同时,升降控制器接收来自于第五位移传感器测得的升降驱动器41实际伸缩位移,并根据它的期望值,输出控制信号给升降驱动器41,驱动升降机构运动,保证可伸缩梯架17与水平面的夹角保持不变,使得当运维船甲板和海上风电平台存在高度差时仍能保证人员换乘与物资转运的安全;
154.e8、若遇到需紧急撤离情况,转e9,否则转e10;
155.e9、启动紧急撤离控制单元;
156.e10、若继续实验,转e6,否则结束实验。
157.以上为本发明的技术方案,但本发明的保护范围并不局限于此,根据本发明的技术方案及其发明构思加以等同替换或改变,都应涵盖在本发明的保护范围之内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。