1.本发明专利涉及自动控制领域,涉及一种非线性的高精度舵机角度控制系统,精确完成舵机的定角度控制。
背景技术:
2.我国海洋领域辽阔,加之海洋事业的不断发展,潜艇、潜航器领域的需求越来越大。高性能舵机在当代潜艇执行任务中发挥着极其巨大的作用。上位机向舵机控制器发出指定角度命令,舵机完成角度变换,最终与舵机相连的舵板联动变化实现潜艇的转向等任务。但实际中,舵机的机械设计为电机驱动,通过一系列机构,实现连续周转运动转化为往复摆动。由于受到机械设计中的各部分影响,其电机的转动运动与舵机输出的往复摆动并不呈现为线性运动关系,往往在零位部分(输出为0
°
)部分为准线性,两侧为完全非线性。因此,通过对电机转数的控制实现对舵机往复角度的控制就十分具有挑战性,实现舵机角度精确控制,具有十分重要的意义。
技术实现要素:
3.本发明的目的是提出了针对舵机角度的非线性关系,本发明提出了一种基于浅层神经网络的控制算法设计,通过预训练的神经网络权重关系,通过电机转数的控制,从而实现对舵机输出角度的精确控制。本控制设计在实际应用领域有着十分重要的现实意义和应用价值。
4.为实现上述技术目的,本发明采用的技术方案如下:
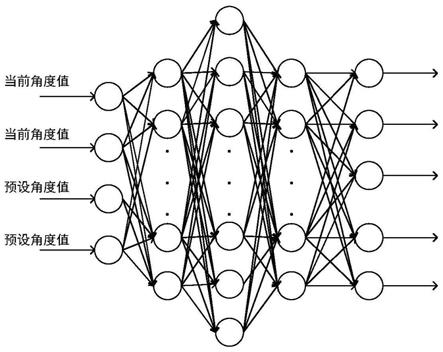
5.一种基于浅层神经网络的舵机非线性特性角度控制系统,包括五层神经网络,所述神经网络的输入层由四个神经元输入构成,第二层由20个神经元构成,第三层由50个神经元构成,第四层由20个神经元构成,输出层由5个神经元构成;每层神经元之间的连接均为全联接构成;其中,所述输入层的前两个神经元用于输入当前舵机的角度值,输入层另外两个神经元用于输入预设的舵机角度值;所述输出层的5个神经元输出数据的平均值作为电机的实际控制转数值。
6.进一步,所述控制系统采用relu激活函数实现舵机非线性的角度控制。
7.进一步,所述控制系统预先通过实验采集不同舵机预设角度和电机转数的对应数据,通过三个世纪训练获得最终训练权重文件,以实现对舵机的非线性预测控制。
8.本发明的有益效果为:
9.1.本发明完美地解决了以电机为驱动单元存在的非线性控制问题,通过控制方案的设计实现了舵机角度的精确控制。
10.2.本发明的控制操作方式简单,应用价值极大。
11.3.由于浅层神经网络固有的特性,能在一定程度上对错误指令进行容错处理,如超出舵机量程的预设角度值,有限幅控制的效果。
附图说明
12.图1为本发明的浅层神经网络构成示意图;
13.图2为本发明采用的relu激活函数示意图;
14.图3为本发明的控制系统的控制流程图。
具体实施方式
15.为了使本领域的技术人员可以更好地理解本发明,下面结合实施例对本发明技术方案进一步说明。
16.本实施例利用了神经网络处理非线性问题强大能力的特性,设计了一种浅层神经网络系统,以预设角度为输入层参数,以电机实际转数值为输出层参数,其整个网络包含五层神经网络,如图1所示;所述神经网络的输入层由四个神经元输入构成,第二层由20个神经元构成,第三层由50个神经元构成,第四层由20个神经元构成,输出层由5个神经元构成;每层神经元之间的连接均为全联接构成;其中,所述输入层的前两个神经元用于输入当前舵机的角度值,输入层另外两个神经元用于输入预设的舵机角度值;所述输出层的5个神经元输出数据的平均值作为电机的实际控制转数值。
17.如图2所示,针对其电机转数和舵机角度之间的非线性关系的特性,本实施例使用relu激活函数实现舵机非线性的角度控制。relu激活函数又称为修正线性单元,是一种分段线性函数,其弥补了其它常见激活函数的梯度消失的问题,并且能很好地解决非线性问题。
18.本系统中权重文件的训练,预先通过实验采集不同舵机预设角度和电机转数的对应数据,通过三个世纪训练获得最终训练权重文件,最终实现对舵机的非线性预测控制。
19.最后说明的是,以上实施例仅用以说明本发明的技术方案而非限制,尽管参照较佳实施例对本发明进行了详细说明,本领域的普通技术人员应当理解,可以对本发明的技术方案进行修改或者等同替换,而不脱离本发明技术方案的宗旨和范围,其均应涵盖在本发明的权利要求范围当中。
技术特征:
1.一种基于浅层神经网络的舵机非线性特性角度控制系统,其特征在于:包括五层神经网络,所述神经网络的输入层由四个神经元输入构成,第二层由20个神经元构成,第三层由50个神经元构成,第四层由20个神经元构成,输出层由5个神经元构成;每层神经元之间的连接均为全联接构成。2.根据权利要求1所述的基于浅层神经网络的舵机非线性特性角度控制系统,其特征在于:所述输入层的前两个神经元用于输入当前舵机的角度值,输入层另外两个神经元用于输入预设的舵机角度值。3.根据权利要求2所述的基于浅层神经网络的舵机非线性特性角度控制系统,其特征在于:所述输出层的5个神经元输出数据的平均值作为电机的实际控制转数值。4.根据权利要求3所述的基于浅层神经网络的舵机非线性特性角度控制系统,其特征在于:所述控制系统采用relu激活函数实现舵机非线性的角度控制。5.根据权利要求3所述的基于浅层神经网络的舵机非线性特性角度控制系统,其特征在于:所述控制系统预先通过实验采集不同舵机预设角度和电机转数的对应数据,通过三个世纪训练获得最终训练权重文件,以实现对舵机的非线性预测控制。
技术总结
本发明公开了一种基于浅层神经网络的舵机非线性特性角度控制系统,包括五层神经网络,所述神经网络的输入层由四个神经元输入构成,第二层由20个神经元构成,第三层由50个神经元构成,第四层由20个神经元构成,输出层由5个神经元构成;每层神经元之间的连接均为全联接构成;其中,所述输入层的前两个神经元用于输入当前舵机的角度值,输入层另外两个神经元用于输入预设的舵机角度值;所述输出层的5个神经元输出数据的平均值作为电机的实际控制转数值;本发明基于浅层神经网络的控制算法设计,通过预训练的神经网络权重关系,通过电机转数的控制,从而实现对舵机输出角度的精确控制。制。制。
技术研发人员:柏龙 杜相龙 陈晓红 孙园喜
受保护的技术使用者:重庆大学
技术研发日:2022.01.26
技术公布日:2022/6/1
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。