1.本发明涉及微型拉伸试验机控制技术领域,具体涉及一种基于树莓派的微型拉伸试验机控制系统。
背景技术:
2.材料试验机是一种在各种条件、环境下对橡胶塑料、纺织物、防水材料、电线电缆、金属等材料进行拉伸、压缩、弯曲、剪切、撕裂等力学性能测试的精密测试仪器,随着新材料、新工艺、新技术和新结构的不断发展,各种器件的尺寸越来越微型化,测量材料的微观形貌变得尤为重要。微型拉伸试验机是一台体积小、测量精度高、响应速度快的精密仪器,目前,现有的微型拉伸试验机控制系统仅仅通过图像处理系统直接应用于万能材料试验机进行图像采集并分析测量结果,无法进行高速实时全场测量。此外,整体控制系统体积大、成本高、操作复杂,无法应用于需要实时测量的现场中。
技术实现要素:
3.针对现有技术存在的不足,本发明的目的在于提供一种基于树莓派的微型拉伸试验机控制系统,能够通过树莓派4b开发板内部编译运行实现动力传递、实时信号采集的python指令以及基于dic技术的模板匹配算法,对微型拉伸试验机实现在不同拉伸力的作用下的自动控制,并快速、精确地实时测量试样在拉伸过程中产生的应力及应变并生成实时动态工程应力-应变曲线。
4.为实现上述目的,本发明提供了如下技术方案:一种基于树莓派的微型拉伸试验机控制系统,包括:
5.微型拉伸试验机、树莓派4b开发板、动力传递模块、信号采集模块、工业摄像头、供电模块以及ips显示屏;
6.所述树莓派4b开发板内部编译运行实现动力传递的python指令并通过gpio引脚连接所述动力传递模块,实现控制微型拉伸试验机对试样进行轴向拉伸试验;树莓派4b开发板内部编译运行实现实时信号采集的python指令并通过spi总线与所述信号采集模块进行通信,实现实时采集试样在拉伸过程中的应力值;树莓派4b开发板内部编译运行基于dic技术的模板匹配算法并通过usb接口连接所述工业摄像头,实现试样在拉伸过程中进行逐帧采集图像并将采集的图像逐一进行图像处理,从而得到试样的实时应变值;树莓派4b开发板内部编译运行python内置函数pandas模块,将测量得到的实时应力值和应变值进行数据处理并通过hdmi接口连接所述ips显示屏,实时显示动态工程应力-应变曲线;
7.所述动力传递模块包括:步进电机驱动器、步进电机、双运算放大器以及磁编码器,步进电机驱动器根据所述树莓派4b开发板发送的脉冲指令驱动步进电机运行到目标位置,磁编码器根据实际位置与目标位置进行比较并反馈信号至树莓派4b开发板中,树莓派4b开发板根据反馈信号修正运动曲线,从而实现闭环反馈控制;
8.所述信号采集模块包括:模数转换器、信号放大器和拉压力传感器,模数转换器将
拉压力传感器采集到的模拟信号转换成数字信号,信号放大器用来放大拉压力传感器的电压输出信号,从而解决拉压力传感器由于输出阻抗高导致输出电压幅度小的问题;
9.所述供电模块包括:5v dc、12v dc、24v dc,5v dc为工业摄像头提供工作电源,12v dc为信号采集模块和ips显示屏提供工作电源,24v dc为动力传递模块提供工作电源。
10.由于所述树莓派4b开发板的所述gpio引脚的输出电压为3.3v,在所述动力传递模块中放置所述双运算放大器用来解决所述磁编码器电压与电流供应不足问题。
11.所述实现动力传递的python指令使用rpi.gpio模块控制所述gpio引脚的高低电平与所述动力传递模块进行数据交互;所述实现实时信号采集的python指令使用spidev模块读写所述spi总线,实现与所述信号采集模块进行数据传输。
12.所述基于dic技术的模板匹配算法使用opencv开源软件库并调用cv2.tm_sqdiff_normed归一化平方差匹配法进行模板匹配,遍历搜索试样变形区域,获得试样的实时应变值,并使用pandas模块进行数据处理,绘制出实时动态工程应力-应变曲线。
13.所述ips显示屏采用15.6寸178
°
超广角jetson nano ips高清触摸显示屏,支持raspbian系统。
14.所述树莓派4b开发板采用bcm2711四核1.5ghz 64位处理器、4g内存芯片以及500mhz gpu,提供usb 3.0端口、千兆以太网口、支持4k的hdmi接口以及5v/3a的电源接口,支持linux和windows 10lot系统。
15.与现有技术相比,本发明具有以下显而易见的突出实质性特点和显著技术进步:
16.本发明采用树莓派4b开发板作为核心控制模块,相比于传统意义上的拉伸试验机控制系统,简化成不需要额外体积较大、成本较高的运动控制卡和数据采集卡,仅需要一个体积小、成本低、多功能性的树莓派4b开发板,通过内部编译运行实现动力传递、实时信号采集的python指令以及基于dic技术的模板匹配算法,实现通过树莓派4b开发板控制微型拉伸试验机进行拉伸试验,同时实时测量试样在拉伸过程中产生的应力及应变并生成实时动态工程应力-应变曲线,达到高速实时全场测量的目的,可从实时动态工程应力-应变曲线中更有效地分析出材料在外力作用下发生的脆性、塑性、屈服、断裂等各种形变过程,进一步地加深对材料拉伸力学性能的研究。
附图说明
17.图1为本发明提供的系统原理图;
18.图2为本发明提供的系统连接图;
19.图3为本发明提供的实现动力传递的python指令程序运行流程图;
20.图4为本发明提供的实现实时信号采集的python指令程序运行流程图;
21.图5为本发明提供的基于dic技术的模板匹配算法程序运行流程图。
具体实施方式
22.下面结合附图和具体实施例对本发明进一步详细说明。
23.本实施例以本发明技术方案为前提进行实施,并给出了详细的实施方式和具体的操作过程,然而,应当将本发明理解成并不局限于以下描述的这种实施方式,并且本发明的技术理念可以与其他公知技术或功能与那些公知技术相同的其他技术组合实施。
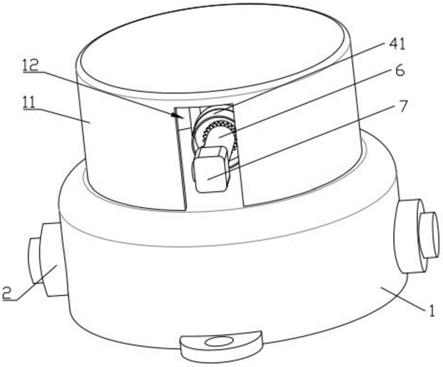
24.如图1和图2所示,本实施例的一种基于树莓派的微型拉伸试验机控制系统,包括:
25.微型拉伸试验机1、树莓派4b开发板2、动力传递模块3、信号采集模块4、工业摄像头5、供电模块6以及ips显示屏7;
26.所述树莓派4b开发板2内部编译运行实现动力传递的python指令并通过gpio引脚2-1连接所述动力传递模块3,实现控制微型拉伸试验机1对试样进行轴向拉伸试验;树莓派4b开发板2内部编译运行实现实时信号采集的python指令并通过spi总线2-1-1与所述信号采集模块4进行通信,实现实时采集试样在拉伸过程中的应力值;树莓派4b开发板2内部编译运行基于dic技术的模板匹配算法并通过usb接口2-2连接所述工业摄像头5,实现试样在拉伸过程中进行逐帧采集图像并将采集的图像逐一进行图像处理,从而得到试样的实时应变值;树莓派4b开发板2内部编译运行python内置函数pandas模块,将测量得到的实时应力值和应变值进行数据处理并通过hdmi接口2-3连接所述ips显示屏7,实时显示动态工程应力-应变曲线;
27.所述动力传递模块3包括:步进电机驱动器3-1、步进电机3-2、双运算放大器3-3以及磁编码器3-4,步进电机驱动器3-1根据所述树莓派4b开发板2发送的脉冲指令驱动步进电机3-2运行到目标位置,磁编码器3-4根据实际位置与目标位置进行比较并反馈信号至树莓派4b开发板2中,树莓派4b开发板2根据反馈信号修正运动曲线,从而实现闭环反馈控制;
28.所述信号采集模块4包括:模数转换器4-1、信号放大器4-2和拉压力传感器4-3,模数转换器4-1将拉压力传感器4-3采集到的模拟信号转换成数字信号,信号放大器4-2用来放大拉压力传感器4-3的电压输出信号,从而解决拉压力传感器4-3由于输出阻抗高导致输出电压幅度小的问题;
29.所述供电模块6包括:5v dc 6-1、12v dc 6-2、24v dc 6-3,5v dc 6-1为工业摄像头5提供工作电源,12v dc 6-2为信号采集模块4和ips显示屏7提供工作电源,24v dc 6-3为动力传递模块3提供工作电源。
30.由于所述树莓派4b开发板2的所述gpio引脚2-1的输出电压为3.3v,在所述动力传递模块3中放置所述双运算放大器3-3用来解决所述磁编码器3-4电压与电流供应不足问题。
31.所述实现动力传递的python指令使用rpi.gpio模块控制所述gpio引脚2-1的高低电平与所述动力传递模块3进行数据交互;所述实现实时信号采集的python指令使用spidev模块读写所述spi总线2-1-1,实现与所述信号采集模块4进行数据传输。
32.所述基于dic技术的模板匹配算法使用opencv开源软件库并调用cv2.tm_sqdiff_normed归一化平方差匹配法进行模板匹配,遍历搜索试样变形区域,获得试样的实时应变值,并使用pandas模块进行数据处理,绘制出实时动态工程应力-应变曲线。
33.所述ips显示屏7采用15.6寸178
°
超广角jetson nano ips高清触摸显示屏,支持raspbian系统。
34.所述树莓派4b开发板2采用bcm2711四核1.5ghz 64位处理器、4g内存芯片以及500mhz gpu,提供usb 3.0端口、千兆以太网口、支持4k的hdmi接口以及5v/3a的电源接口,支持linux和windows 10lot系统。
35.程序运行流程:
36.如图3所示,导入rpi.gpio模块并定义连接的gpio引脚,调用gpio.output函数依
次设置输出引脚状态为高电平或低电平,定义相关函数并通过for循环,依次设置所述步进电机在正转、反转和一直旋转这三种状态下的快慢和圈数,同时设置步进电机正转一圈所对应的脉冲数,由此,当输入正转或反转时的脉冲总数,即可控制步进电机的运动方向和运动距离,直到运动停止,调用gpio.cleanup函数清除引脚状态赋值并释放数据。
37.如图4所示,执行sudo raspi-config命令进入配置页并打开spi总线,调用lsmod命令查看当前spi设备,导入spidev模块进行定义变量并创建spidev对象,调用spidev.spidev.open函数初始化spi通道0并调用spidev.spidev.max_speed_hz函数设置spi串口最大频率500khz,调用spidev.spidev.readbytes和spidev.spidev.writebytes函数从spi设备进行读写,调用spidev.spidev.xfer函数设置串口波特率并进行数据传输,导入pandas模块进行数据处理并生成时间-应力曲线。
38.如图5所示,定义模板尺寸及搜索区域大小,调用glob.glob函数指定图像获取路径,调用cv2.imread、shape和math.floor函数获取图像维度并进行索引,调用cv2.tm_sqdiff_normed归一化平方差匹配法并调用numpy.zeros函数提取图像的shape值和数据类型,通过for循环依次定义当前搜索区域的开始、结束索引x和y以及当前模板索引,调用cv2.matchtemplate目标匹配函数定义待搜索图像、模板图像以及计算匹配程度的方法,调用cv2.minmaxloc函数获取图像矩阵的最大值、最小值,依次遍历进行模板匹配,直到搜索完成获得结果数据,导入matplotlib模块绘制时间-应变曲线并生成应变云图,导入pandas模块结合时间-应力曲线进行数据处理,处理得到实时动态工程应力-应变曲线。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。