1.本发明涉及微创手术机器人技术领域,更具体地说,是一种机器人底座。
背景技术:
2.与传统人工手术相比,机器人辅助手术具有精度高、效率高、手术并发症少等特点,在手术过程中,手术机器人代替医生在手术台旁完成各项手术操作,此时手术机器人均需稳定地支撑在手术室地面,以保证机械臂动作的精准性。在手术结束后,手术机器人还需要快速的从手术位置撤离,为医生的后续操作让出空间。因此,要求设备具有锁地功能,且锁地操作具有简便、快捷、安全的优点。现有的锁地装置存在结构复杂、操作费力、可靠性低等缺点。为适应现代化微创手术的需要,手术机器人的锁地装置应具有操作简便、工作可靠的特点。另外,柔顺控制技术使机器人更加贴近医生的人手操作效果,极大地提高了手术机器人的安全性。而要想实现较高精度的力交互功能,就需要进行高精度的重力补偿,而这就需要机器人锁地时能够将基座调节到较高的水平度。
技术实现要素:
3.为解决以上现有技术存在的问题,本发明提出一种机器人底座。
4.本发明可通过以下技术方案予以实现:
5.一种机器人底座,包括基座、控制系统、四个万向轮和四个电动伸缩杆,所述四个万向轮分别连接在所述基座的四个角上,所述电动伸缩杆包括电机、丝杆、行程开关、伸缩杆、外壳、位置传感器和减速齿轮组,所述位置传感器测量伸缩杆的伸出位移量,该四个电动伸缩杆分别穿过所述基座后在所述伸缩杆的底部安装有脚垫;所述控制系统上设有电流传感器检测各个电动伸缩杆的电机的工作电流。
6.进一步地,所述伸缩杆穿过所述基座后分别穿过与伸缩杆外径间隙配合的支撑定位套后安装脚垫,该支撑定位套到固定在所述基座上。
7.进一步地,所述电动伸缩杆的电机为步进电机,所述控制系统包括用于驱动步进电机的闭环步进电机驱动器。
8.进一步地,所述位置传感器为安装在步进电机末端的旋转编码器,或安装在外壳处,测量伸缩杆位移量的直线位移传感器。
9.进一步地,所述四个电动伸缩杆的顶部分别设有u型支撑板,该u型支撑板的底部固定在所述基座上。
10.进一步地,所述四个电动伸缩杆分别对应位于所述四个万向轮的内侧。
11.进一步地,所述基座上设有环境感知模块,所述环境感知模块内置陀螺仪。
12.进一步地,所述环境感知模块内置双目摄像头,所述双目摄像头位于基座底面,朝向地面。
13.进一步地,所述双目摄像头可采用红外传感器、激光传感器或超声测距仪代替:
14.1.结构简单可靠、承载能力强、可以随时锁地随时移动;
15.2.能够快速精准地调整水平,有利于机器人的高精度重力补偿,从而实现较高精度的力交互功能;
16.3.能够精确地确定机器人在手术室内的位姿,便于手术定位或避免与其他医疗器械发生碰撞。
附图说明
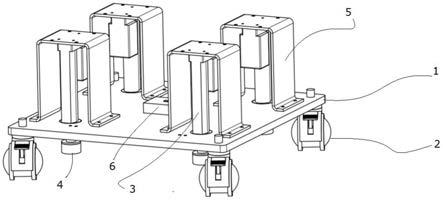
17.图1为本发明的结构示意图;
18.图2为本发明基座底面结构示意图;
19.图3为标记物示意图。
具体实施方式
20.以下通过特定的具体实施例说明本发明的实施方式,本领域的技术人员可由本说明书所揭示的内容轻易地了解本发明的其他优点及功效。
21.如图1和2所示,一种机器人底座,包括基座1、控制系统、四个万向轮2和四个电动伸缩3杆,四个万向轮2分别连接在基座1的四个角上,电动伸缩杆3包括电机、丝杆、行程开关、伸缩杆、外壳、位置传感器和减速齿轮组,位置传感器测量伸缩杆的伸出位移量,该四个电动伸缩杆分别穿过基座1后在伸缩杆的底部安装有脚垫4;控制系统上设有电流传感器检测各个电动伸缩杆3的电机的工作电流。四个电动伸缩杆3的顶部分别设有一u型支撑板5,该u型支撑板5的底部固定在基座1上,支撑定位套8的作用在于承担主要的侧向力,避免机器人在受到侧向力时导致支撑杆弯曲变形。四个电动伸缩杆3分别对应位于四个万向轮的内侧。
22.其中,伸缩杆穿过基座1后分别穿过与伸缩杆外径间隙配合的支撑定位套8后安装脚垫,该支撑定位套到固定在基座1上。
23.其中,电动伸缩杆3的电机为步进电机,控制系统包括用于驱动步进电机的闭环步进电机驱动器。
24.其中,位置传感器为安装在步进电机末端的旋转编码器,或安装在外壳处,测量伸缩杆位移量的直线位移传感器。
25.其中,基座1上设有环境感知模块6,环境感知模块6内置陀螺仪,通过控制多个步进电机的运动,来实现整体机器人的水平调节,也可以采用下面这种方式来大致调水平,其具体流程为:
26.1)各个电动伸缩杆3向下伸出,当触碰到地面时,电机电流增大(超过一定的阈值),电机停止;
27.2)等待所有电动伸缩杆3停止(因为地面高度不一,可能触碰到地面的时间不一致);
28.3)将电动伸缩杆3同时向下运动一段距离,此时机器人将整体抬升相应的距离;
29.4)控制器在陀螺仪的反馈下控制电动伸缩杆做微型的调整,直到机器人整体的水平度达到手术要求。
30.为了精准地进行某些手术且不与其他手术器械发生碰撞干涉,例如穿刺手术,机器人必须获取其在手术室内的精确位姿,此时可以在手术室的地面安装一个标记物9,如图
3所示,然后通过环境感知模块上的双目摄像头7来对标记物进行识别定位,利用视差原理获取机器人与标记物的相对位姿信息,在手术前,必须对手术室进行高精度标定,确定手术床、影像设备(如ct机、x光机)等医疗器械与地面标记物的相对位姿。
31.其中,双目摄像头可采用红外传感器、激光测距仪或超声测距仪代替。
32.以上所述仅为本发明的较佳实施例而已,并不用以限制本发明,凡在本发明的精神和原则之内所作的任何修改、等同替换和改进等,均应包含在本发明的保护范围之内。
技术特征:
1.一种机器人底座,其特征在于,包括基座、控制系统、四个万向轮和四个电动伸缩杆,所述四个万向轮分别连接在所述基座的四个角上,所述电动伸缩杆包括电机、丝杆、行程开关、伸缩杆、外壳、位置传感器和减速齿轮组,所述位置传感器测量伸缩杆的伸出位移量,该四个电动伸缩杆分别穿过所述基座后在所述伸缩杆的底部安装有脚垫;所述控制系统上设有电流传感器检测各个电动伸缩杆的电机的工作电流。2.根据权利要求1所述的一种机器人底座,其特征在于,所述伸缩杆穿过所述基座后分别穿过与伸缩杆外径间隙配合的支撑定位套后安装脚垫,该支撑定位套到固定在所述基座上。3.根据权利要求1所述的一种机器人底座,其特征在于,所述电动伸缩杆的电机为步进电机,所述控制系统包括用于驱动步进电机的闭环步进电机驱动器。4.根据权利要求1所述的一种机器人底座,其特征在于,所述位置传感器为安装在步进电机末端的旋转编码器,或安装在外壳处,测量伸缩杆位移量的直线位移传感器。5.根据权利要求1所述的一种机器人底座,其特征在于,所述四个电动伸缩杆的顶部分别设有u型支撑板,该u型支撑板的底部固定在所述基座上。6.根据权利要求1所述的一种机器人底座,其特征在于,所述四个电动伸缩杆分别对应位于所述四个万向轮的内侧。7.根据权利要求1所述的一种机器人底座,其特征在于,所述基座上设有环境感知模块,所述环境感知模块内置陀螺仪。8.根据权利要求7所述的一种机器人底座,其特征在于,所述环境感知模块内置双目摄像头,所述双目摄像头位于基座底面,朝向地面。9.根据权利要求8所述的一种机器人底座,其特征在于,所述双目摄像头可采用红外传感器、激光传感器或超声测距仪代替。
技术总结
本发明公开一种机器人底座,包括基座、控制系统、四个万向轮和四个电动伸缩杆,四个万向轮分别连接在所述基座的四个角上,电动伸缩杆包括电机、丝杆、行程开关、伸缩杆、外壳、位置传感器和减速齿轮组,位置传感器测量伸缩杆的伸出位移量,该四个电动伸缩杆分别穿过基座后在所述伸缩杆的底部安装有脚垫;控制系统上设有电流传感器检测各个电动伸缩杆的电机的工作电流。本发明结构简单可靠,可以随时锁地随时移动,能快速精准地调整水平,且能精确地确定机器人在手术室内的位姿。定机器人在手术室内的位姿。定机器人在手术室内的位姿。
技术研发人员:万梓威 周春琳 甄辉 高凯梁 张广宇 张标
受保护的技术使用者:浙江大学湖州研究院
技术研发日:2022.02.25
技术公布日:2022/6/1
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。