技术特征:
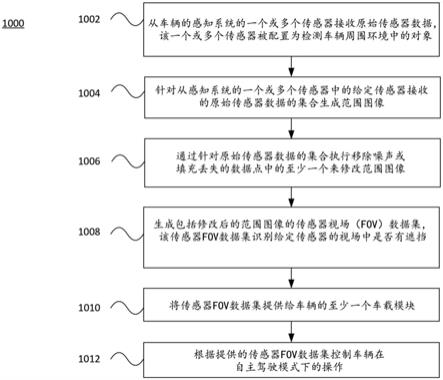
1.一种以自主驾驶模式操作车辆的方法,所述方法包括:由一个或多个处理器从车辆的感知系统的一个或多个传感器接收原始传感器数据,所述一个或多个传感器被配置为检测车辆周围环境中的对象;由一个或多个处理器针对从感知系统的一个或多个传感器中的给定传感器接收的原始传感器数据的集合生成范围图像;由一个或多个处理器通过针对原始传感器数据的集合执行移除噪声或填充丢失数据点中的至少一个来修改范围图像;由一个或多个处理器生成包括修改后的范围图像的传感器视场fov数据集,所述传感器fov数据集识别给定传感器的视场中是否有遮挡;将传感器fov数据集提供给车辆的至少一个车载模块;以及根据提供的传感器fov数据集控制车辆在自主驾驶模式下的操作。2.如权利要求1所述的方法,其中,移除噪声包括基于由给定传感器接收的最后返回的结果从范围图像滤除噪声值。3.如权利要求1所述的方法,其中,填充丢失数据点包括以与范围图像的一个或多个相邻区域相同的方式表示具有丢失数据点的范围图像的部分。4.如权利要求1所述的方法,其中,修改范围图像包括应用启发式校正方法。5.如权利要求4所述的方法,其中,所述启发式校正方法包括在一段时间追踪车辆周围环境中的一个或多个检测的对象以确定如何校正与所述一个或多个检测的对象相关联的感知数据。6.如权利要求5所述的方法,其中,与所述一个或多个检测的对象相关联的感知数据是通过填充与给定检测的对象相关联的数据孔洞来校正的。7.如权利要求5所述的方法,其中,与所述一个或多个检测的对象相关联的感知数据是通过根据所述一个或多个检测的对象的相邻边界来插值丢失像素来校正的。8.如权利要求1所述的方法,其中,生成所述传感器fov数据集还包括在保持指定量的传感器分辨率的同时压缩修改后的范围图像。9.如权利要求1所述的方法,其中,生成所述传感器fov数据集包括基于给定传感器的操作特性确定是否压缩修改后的范围图像。10.如权利要求9所述的方法,其中,所述操作特性从由传感器类型、最小分辨率阈值和传输带宽构成的组选择。11.如权利要求1所述的方法,其中:将传感器数据集提供给至少一个车载模块包括将传感器数据集提供给规划器模块;以及控制车辆在自主驾驶模式下的操作包括规划器模块控制车辆的方向或速度中的至少一个。12.如权利要求11所述的方法,其中,控制所述车辆的操作包括:根据传感器fov数据集确定在车辆周围环境中沿特定方向是否存在遮挡;以及在确定存在遮挡时,修改车辆的方向或速度中的至少一个以考虑遮挡。13.如权利要求1所述的方法,其中,生成所述传感器fov数据集包括评估最大可见范围值是否比感兴趣的点的物理距离更近,以确定感兴趣的点是可见的还是被遮挡的。
14.如权利要求1所述的方法,还包括将传感器fov数据集提供给远程计算系统的至少一个非车载模块。15.一种被配置为以自主驾驶模式操作车辆的系统,所述系统包括:存储器;以及可操作地耦合到存储器的一个或多个处理器,所述一个或多个处理器被配置为:从车辆的感知系统的一个或多个传感器接收原始传感器数据,所述一个或多个传感器被配置为检测车辆周围环境中的对象;针对从感知系统的一个或多个传感器中的给定传感器接收的原始传感器数据的集合生成范围图像;通过针对原始传感器数据的集合执行移除噪声或填充丢失数据点中的至少一个来修改范围图像;生成包括修改后的范围图像的传感器视场fov数据集,所述传感器fov数据集识别给定传感器的视场中是否有遮挡;将生成的传感器fov数据集存储在存储器中;以及根据存储的传感器fov数据集控制车辆在自主驾驶模式下的操作。16.如权利要求15所述的系统,其中,移除噪声包括基于由给定传感器接收的最后返回的结果从范围图像滤除噪声值。17.如权利要求15所述的系统,其中,填充丢失数据点包括以与范围图像的一个或多个相邻区域相同的方式表示具有丢失数据点的范围图像的部分。18.如权利要求15所述的系统,其中,修改范围图像包括应用启发式校正方法。19.如权利要求15所述的系统,其中,生成所述传感器fov数据集包括基于给定传感器的操作特性确定是否压缩修改后的范围图像。20.一种被配置为以自主驾驶模式操作的车辆,所述车辆包括:如权利要求15所述的系统;以及所述感知系统。
技术总结
本技术涉及通过确定车辆四周的环境中遮挡的存在来以自驾驶模式操作车辆。接收一个或多个传感器的原始传感器数据(1002),并基于接收的数据计算每个传感器的范围图像(1004)。可以鉴于从其他传感器获得的感知信息、启发式分析和/或基于学习的方法以填充数据中的缺漏或滤除噪声(1006),来校正范围图像数据。可以在打包成用于由车载和非车载系统消耗的格式之前压缩校正后的数据(760)。这些系统能够获得和评估校正后的数据以用于诸如执行驾驶操作、规划即将到来的路线、测试驾驶场景等的实时和非实时情形(1012)。非实时情形(1012)。非实时情形(1012)。
技术研发人员:M.邹 P.莫顿 C.劳特巴赫
受保护的技术使用者:伟摩有限责任公司
技术研发日:2020.10.06
技术公布日:2022/5/31
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。