1.本发明涉及镇静评估,尤其涉及一种医学成像系统和一种用于评估镇静水平的方法。
背景技术:
2.需要对处于镇静状态的患者进行监测以确定其镇静深度,这通常是由医务人员手动完成的。监测镇静深度和全身麻醉(ga)的经典方法涉及工作人员对临床标准(如对语言和触觉刺激的响应性)的反复手工监测。
3.在自主成像环境中,镇静深度的自动监测可能是期望的。人们已经做了各种尝试来寻找新的监测形式,这些监测形式较少人工,更客观,是自主成像中需要的标准。这些方法中的一种是在摄像机靠近患者眼睛的情况下用视频瞳孔测量法取代经典的人工检查瞳孔反射。瞳孔测量法是对瞳孔尺寸及其动态变化的定量测量。然而,这需要患者保持其眼睛的睁开,或通过一些机械手段使眼睛保持睁开。在较长的成像过程中,这两者都是非常不方便的。由于眼睑中的强烈散射,预计任何利用与自主成像兼容的装置的光学或红外(ir)测量都无法达到通过闭合的眼睑测量瞳孔直径所需的准确度。一般来说,任何必须正确地施加于患者的传感器都可能使工作流程复杂化,并潜在地使自主成像中的可靠性复杂化。
技术实现要素:
4.可能需要使自主成像中的镇静深度监测更便利。
5.本发明的目的通过独立权利要求的主题得到了解决,其中进一步的实施方案被纳入从属权利要求中。应指出的是,本发明的下述方面也适用于医学成像系统和评估镇静水平的方法。
6.本发明的第一方面涉及一种医学成像系统。该医学成像系统包括医学成像设备和镇静评估设备。医学成像设备被配置成获取患者身体部位的一系列图像,以检测患者的至少一种反射的响应反应。该至少一种反射选自具有依赖于镇静深度的响应反应的反射。镇静评估设备被配置成基于检测到的响应反应来确定患者的镇静水平。
7.换句话说,提出使用成像模态本身来测量对适合的反射的响应,以便确定镇静深度。如前所述,如果使用附加的传感器来测量对适合的反射的响应,则该传感器可能必须正确地施加于患者。这可能会使工作流程复杂化,并潜在地使自主成像中的可靠性复杂化。因此,使用成像模态本身而不使用附加的传感器来测量对适合的反射的响应可能会使工作流程便利并改善自主成像中的可靠性。
8.本文中所用的医学成像设备是指用于获取物体的内部结构作为图像的装置。医学成像设备是一种非侵入性的检查装置,它可以捕获和处理身体内的结构细节、内部组织和/或液体流动。用户(如医生)可以通过使用从医学成像设备输出的医学图像来诊断患者的健康状况和疾病。医学成像设备可以包括例如磁共振成像(mri)装置、计算机断层扫描(ct)装置和x射线装置。
9.人体有大约五十种反射,涵盖了广泛的身体系统,但只有一些反射可适合在自主成像环境中用于镇静监测,因为它们必须至少要满足以下两个标准:(1)反射的响应反应必须依赖于镇静深度;和(2)响应在临床环境中必须是可测量的,使其可以容易地与诊断成像集成。换句话说,出于诊断的目的,医学成像设备(如mri、ct或x射线装置)被用来对身体进行成像,以获得正确的诊断并确定未来的护理。反射应被选择以具有在临床环境中能够被医学成像设备测量到的患者反应。因此,在诊断性医学成像期间,成像模态本身,即医学成像设备,可以直接用于测量对适合的反射的响应,而无需使用附加的传感器。
10.许多反射,如众所周知的髌骨或膝跳反射是单突触的,这意味着它们的反射弧只涉及两个神经元,其包括通过通常位于脊柱中的单个突触连接的一个感觉神经元和一个反应运动神经元。因为这条路径不包括中枢神经系统(cns),所以反应不依赖于cns的状态,因此不依赖于镇静深度。另外的单突触反射是肱二头肌反射、肱桡肌反射、伸指肌反射、肱三头肌反射和跟腱反射。所有这些运动反射都能保护肌肉或肌腱不被过度拉伸。其他反射不适合,因为它们涉及对患者不方便的刺激或反应,或涉及身体的主要运动,如咳嗽、喷嚏反射,或触摸眼睛时的眨眼反射。还有一些反射是不适合的,因为它们针对内部生理量,这些内部生理量不容易测量,如气压反射、班布里奇(bainbridge)反射、贝佐尔-贾里希(bezold-jarisch)反射。
11.以下反射可能适合在自主成像中用于镇静监测。
12.响应于视网膜的照度变化的瞳孔反射可适用于镇静深度测量,详见下文。瞳孔反射可适合在磁共振成像(mri)系统中用于镇静深度监测。例如,瞳孔反射可以在mri系统中通过专用虹膜mr成像与常规扫描方案的反复交错进行来测量。
13.另一组适合的反射包括浅层反射,这些反射响应于皮肤的刮擦而具有运动响应。示例包括腹壁反射、睾提肌反射、眉间反射和正常足底响应。后者涉及抚摸足底时大脚趾的弯曲,且可能特别有用,因为它涉及温和的刺激和带有轻微局部运动的响应。眉间反射,也被称为“眉间叩击征”,涉及在重复敲击前额时眼睛眨动,且似乎也很有用。浅层反射可适合在mri系统、x射线成像系统或计算机断层扫描(ct)系统中用于镇静深度监测。mr成像设备、x射线成像设备或ct成像设备可以获取身体部位的一系列图像,以检测响应反应,例如,轻微的局部运动、眼睛眨动等。
14.另一个适合的组包括四肢或手指的退缩反射,因为如果被诱发的运动不干扰成像,则它们可以在诊断成像期间容易地被刺激和测量。退缩反射可适合在mri系统、x射线成像系统或ct系统中用于镇静深度监测。这些系统可以获取身体部位的一系列图像,以检测响应反应,即四肢或手指的被诱发的运动。
15.根据本发明的一实施例,该至少一种反射包括瞳孔反射。
16.几种不同类型的测量可用于确定瞳孔反射,包括但不限于静止瞳孔尺寸(max)、光刺激后的最小瞳孔尺寸(min)、瞳孔尺寸减小比率(表示为百分比的[max-min]/max)、延迟持续时间(即,视网膜光刺激开始和瞳孔收缩开始之间的时间)、收缩速度(即,收缩的程度/收缩的持续时间)、最大收缩速度和扩张速度(即,瞳孔尺寸恢复的程度/恢复的持续时间)。
[0017]
根据本发明的一实施例,医学成像设备被配置成检测患者虹膜的静止尺寸,以用于测量瞳孔反射。
[0018]
静止瞳孔尺寸(max)与常用药剂的镇静深度有很好的相关性,如七氟烷-瑞芬太尼
(sev/rem)、七氟烷(sev)、地氟烷-瑞芬太尼(des/rem)和丙泊酚-瑞芬太尼(pro/rem))。静止瞳孔尺寸(max)显示出较大的响应,且不需要任何刺激。镇静深度变化的典型时间尺度是大约几分钟。高分辨率的mr成像可用于测量虹膜的静止尺寸,以提供镇静深度的测量。瞳孔尺寸的变化为大约几毫米,这可以用mr成像方法解决。
[0019]
根据本发明的一实施例,医学成像设备包括磁共振成像mri设备。
[0020]
根据本发明的一实施例,mr成像设备被配置成施加用于执行瞳孔测量的专用序列。
[0021]
针对肿瘤学执行的眼睛常规mr成像可用于测量瞳孔反射,它可以提供高分辨率的细节。然而,这种方法可能需要大约几分钟的成像时间。在此,可以优选专用序列,其仅具有为了执行瞳孔测量的目的,因此要快得多。
[0022]
根据本发明的一实施例,专用序列是t2w快速自旋回波序列,其使用沿相位编码方向的切片选择性再聚焦脉冲。
[0023]
可以应用t2w快速自旋回波序列的变体,其使用沿相位编码方向的切片选择性再聚焦脉冲。这将视场限制在眼睛区域,因此能够在不到一分钟的成像时间内实现1毫米的平面内分辨率。固定的视场尺寸可用于所有患者,因为受试者之间的人眼尺寸变化非常小。眼睛运动可能会使成像过程复杂化,但在mri中已知有许多运动减少和运动补偿的方法,可以应用这些方法来减轻这种影响。
[0024]
根据本发明的一实施例,该至少一种反射包括浅层反射和退缩反射中的至少一种。
[0025]
根据本发明的一实施例,医学成像系统还包括至少一个刺激发生器。该至少一个刺激发生器被配置成在患者皮肤上的冲击区域处产生至少一种刺激,以刺激该至少一种反射的响应反应。
[0026]
在一示例中,该至少一个刺激发生器可包括远程触觉装置,其被配置成在不接触患者的情况下从远处刺激患者的响应反应。
[0027]
在另一示例中,该至少一个刺激发生器可包括可穿戴装置,如可附接于患者的加热装置,以刺激患者的响应反应。
[0028]
在另一示例中,该至少一个刺激发生器可包括可以与成像模态紧密集成的致动器,例如,与患者支架集成的夹捏装置或施加于患者的mr接收线圈。
[0029]
该至少一个刺激发生器可由控制装置来控制,以便以期望的强度、重复率和/或持续时间来刺激该至少一种反射的响应反应。控制装置可向该至少一个刺激发生器发送控制信号,以控制刺激的强度、重复率和/或持续时间。控制信号可以经由物理线缆,如通用串行总线(usb)线缆,或无线方式,如蓝牙或无线lan(wifi)发送。在一示例中,控制信号可以响应于来自用户界面的命令而产生。在另一示例中,控制信号可以通过对多个患者的历史数据使用机器学习和统计技术而自动地生成。
[0030]
根据本发明的一实施例,浅层反射包括正常足底响应和眉间反射中的至少一种。
[0031]
根据本发明的一实施例,该至少一个刺激发生器包括用于刺激正常足底响应的下列装置中的至少一种:可附接于患者足底的抚摸装置,和被配置成从远处在患者足底上的冲击区域处诱发触觉感觉的远程触觉装置。
[0032]
图1中示出了远程触觉装置的一个示例性示例,即远程触觉装置130a。
[0033]
根据本发明的一实施例,该至少一个刺激发生器包括用于刺激眉间反射的下列装置中的至少一种:被配置成重复敲击患者的前额的装置,和被配置成从远处在患者的前额上的冲击区域处诱发触觉感觉的远程触觉装置。
[0034]
例如,如图1b所示,该装置可与mr头部线圈70集成。
[0035]
根据本发明的一实施例,远程触觉装置包括以下发射器中的至少一种:
[0036]
i)空中声学发射器;
[0037]
ii)空中超声触觉发射器;
[0038]
iii)空气喷嘴;
[0039]
iv)电磁波发射器;
[0040]
v)电发射器;
[0041]
vi)磁发射器;和
[0042]
vii)射频发射器。
[0043]
空中声学发射器使用声波来产生声学辐射压力,它能够以任何期望的强度、频率和/或持续时间诱发触觉感觉。例如,通过在触觉敏感度的范围(例如10-200赫兹)内调制声场,声音被感知为振动。
[0044]
空中超声触觉发射器可以形成在特定焦点处形成的超声束,并产生声学辐射压力。聚焦的超声波在远处以非侵入性的方式导致产生任何期望的强度、频率和/或持续时间的触摸感觉。
[0045]
空气喷嘴可以产生气流模式,其导致产生能够在冲击区域处在患者皮肤上诱发触觉感觉的定向空气喷射。直接压缩空气方法或基于涡旋的方法都可用于模拟触觉感觉。
[0046]
电磁波发射器,如激光,可用于在离激发源一定距离的位置产生触觉效果。电磁波发射器可以是基于脉冲激光的系统,如纳秒激光器,当它施加于皮肤时会唤起触觉感觉。例如,电磁辐射被配置成激发嵌置在患者皮肤内的机械感受器。例如,轻推(nudging)发射器可以被布置成为能够以适当的频率操作的激光发射器。
[0047]
上述发射器可以单独使用或组合使用。例如,轻推信号可以是脉冲式的。在上述任何一个实施例中,单个的频率、脉冲的频率和/或轻推信号的强度可以在整个轻推操作过程中保持不变,但在其他实施例中也可以变化。更详细地说,关注区域离目标区域越近,轻推信号的强度可以下降。靠近信息可以附加地或替代地通过改变轻推信号的脉动频率来调制。以类似的方式,超声信号本身的频率也可以改变。
[0048]
根据本发明的一实施例,该至少一个刺激发生器被配置成在患者皮肤上的冲击区域处诱发突然的缝合疼痛和/或局部的温度引起的疼痛,以刺激退缩反射。
[0049]
在一示例中,该至少一个刺激发生器可包括可与成像模态紧密集成的致动器,例如,与患者支架集成的夹捏装置或施加于患者的mr接收线圈。
[0050]
在另一示例中,该至少一个刺激发生器可包括加热和/或冷却装置,其可附接于患者皮肤上的冲击区域,并被配置成加热或冷却该冲击区域以诱发疼痛感觉。图5中示出了加热和/或冷却装置的示例性示例,即装置130c。
[0051]
根据本发明的一实施例,医学成像设备包括以下中的至少一种:mr成像设备、x射线成像设备和计算机断层扫描ct成像设备。
[0052]
mr成像设备可被配置成施加专用序列以获取患者身体部位的图像,以便检测患者
的至少一种反射的响应反应。这将在下文中解释,尤其是关于图1a中的示例性示例。
[0053]
x射线成像设备和ct成像设备可以被配置成获取患者身体部位的一系列的低分辨率侦察图像,以检测患者的至少一种反射的响应反应。ct成像设备还可包括正电子发射断层扫描-计算机断层扫描(pet-ct)成像设备或单光子发射计算机断层扫描-计算机断层扫描(spet-ct)成像设备。这将在下文中解释,尤其是关于图5中的示例性示例。
[0054]
本发明的第二方面涉及一种用于评估镇静水平的方法。该方法包括
[0055]
利用医学成像设备获取患者身体部位的一系列图像,以检测患者的至少一种反射的响应反应;
[0056]
其中,该至少一种反射选自具有依赖于镇静深度的响应反应的反射;和
[0057]
基于检测到的响应反应,确定患者的镇静水平。
[0058]
本发明的第三方面涉及一种计算机程序单元,在被至少一个处理单元执行时,该计算机程序单元适于致使处理单元执行上述和下述方法。
[0059]
本发明的第四方面涉及其上存储有该程序单元的计算机可读介质。
[0060]
本发明的这些和其他方面将从下文描述的实施例中变得明显并得到阐明。
[0061]
定义
[0062]
本文中所用的术语“用户”应被理解为至少部分地以管理或组织的方式参与成像操作的医务人员。
[0063]
本文中所用的术语“患者”应被视为被成像的人,或在兽医环境中被成像的动物(尤其是哺乳动物)。
附图说明
[0064]
参考在以下描述中以示例方式描述的实施例并参考附图,本发明的这些和其他方面将变得明显并得到进一步阐明,其中
[0065]
图1a示意性地示出了根据本公开的一些实施例的医学成像系统。
[0066]
图1b示意性地示出了mr头部线圈的示例。
[0067]
图2a至2c示出了三种不同的瞳孔测量结果对施用不同镇静剂(包括sev/rem、sev、des/rem、pro/rem)的响应。
[0068]
图3示出了用于自动扫描规划的低分辨率侦察图像的示例。
[0069]
图4a和4b示出了人眼的高分辨率mr成像。
[0070]
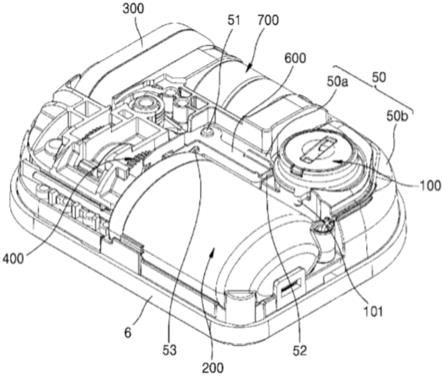
图5示意性地示出了根据本公开的一些实施例的另一医学成像系统。
[0071]
图6示出了一种用于评估镇静水平的方法的流程图。
[0072]
应指出的是,这些图纯粹是示意图,且没有按比例绘制。在这些图中,与已经描述的元件相对应的元件可具有相同的附图标记。示例、实施例或可选特征,无论是否标明为非限制性的,都不应被理解为对所要求保护的发明的限制。
具体实施方式
[0073]
图1a示意性地和示例性地示出了医学成像系统100的实施例。医学成像系统100包括医学成像设备110,例如图1a中的mr成像设备110a和图5中的ct成像设备110b,以及镇静评估设备120。医学成像设备可以是以下中的任一种:i)mr成像设备,ii)x射线成像设备,和
iii)ct成像设备。ct成像设备可以是pet-ct成像设备或spet-ct成像设备。
[0074]
在图1a的这个示例性实施例中,医学成像设备10是mr成像设备110a,其具有mr孔10和患者支撑台20。根据图1a,患者pat,其可以是图1a所示的人类患者或动物(未示出),被放置在患者支撑台20的顶部上,在系统100的可操作状态中,该支撑台被设置在mr孔10内。
[0075]
镇静定量是扫描破坏性事件中的重要领域。它需要给患者优化的镇静剂量。为了确定位于mr孔10内的患者pat的镇静水平,医学成像设备110被配置成获取患者pat的身体部位的一系列图像,以检测患者的至少一种反射的响应反应。
[0076]
如前所述,人体有大约五十种反射,涵盖了广泛的身体系统,但只有一些反射适合在自主成像环境中用于镇静监测,因为它们必须满足至少两个标准:(i)该至少一种反射选自具有依赖于镇静深度的响应反应;(ii)该响应反应在临床环境中是可测量的,使其可以与诊断成像集成。
[0077]
在图1a的示例性mr成像系统中适用于镇静监测的反射包括瞳孔反射、浅层反射和退缩反射中的至少一种。
[0078]
在第一示例中,瞳孔反射可以在mri系统中基于以下中的至少一项进行测量:静止瞳孔尺寸(max)、光刺激后的最小瞳孔尺寸(min)、瞳孔尺寸减小比率([max-min]/max)、延迟持续时间、收缩速度、最大收缩速度和扩张速度。对于列表中的一些测量,mr成像的时间分辨率可能不足以解决动态量。
[0079]
众所周知且已经表明,对于视频瞳孔测量法来说,静止瞳孔尺寸(max)与常用药剂的镇静深度有很好的相关性,如sev/rem、sev、des/rem和pro/rem。例如,图2a至2c示出了三种不同的瞳孔测量结果对施用不同镇静剂(包括sev/rem、sev、des/rem、pro/rem)的响应。尤其是,图2a示出了与非镇静的对照组相比的静止瞳孔尺寸(max)。图2b示出了光刺激后的瞳孔尺寸的减小。图2c示出了与非镇静的患者组相比的瞳孔反射延迟的增加。应指出的是,静止瞳孔尺寸(max)显示出大的响应,且不需要任何刺激。镇静深度变化的典型时间尺度为大约几分钟。因此,提出应用高分辨率的mr成像来测量虹膜的静止尺寸,以提供镇静深度的测量。瞳孔尺寸的变化为大约几毫米,这可以用mr成像方法来解决。
[0080]
对于自动扫描规划,眼睛的位置和眼球晶状体的大致位置可以在每次成像过程开始时使用的侦察mr图像上确定。提出利用这样的扫描来自动地确定眼睛和晶状体的位置,然后再规划更高分辨率的虹膜扫描。优选的是,虹膜扫描被规划成在冠状方向上与虹膜共面,已知虹膜位于晶状体的前面。自动规划可以用已知的自动规划概念来进行,类似于脑中飞利浦smartexam
tm
,其中获取低分辨率的侦察图像,执行自动识别患者特定的解剖标志,并基于识别出的标志来估计诊断扫描中的切片取向。关于上述的脑中philips smartexam
tm
的自动规划概念的详细讨论,参考以下专利us 9,724,538 b2。图3示出了用于自动扫描规划的低分辨率侦察图像的示例。在图3中,示出了穿过眼睛的横向t1w mr侦察图像,这通常是在2秒内获取的。眼球晶状体被绘示为黑色眼球正面部分内的白点。这样的扫描可以用来确定眼球晶状体的大致位置,并规划与位于晶状体前方的虹膜共面的冠状扫描。
[0081]
针对肿瘤学执行的常规眼睛mr成像可用于测量瞳孔反射,它可以提供高分辨率的细节。然而,这种方法可能需要大约几分钟的成像时间。在这里,可以优选专用序列,其仅具有为了执行瞳孔测量的目的,因此要快得多。优选地,可以使用t2w快速自旋回波序列的变体,其使用沿相位编码方向的切片选择性再聚焦脉冲。这将视场限制在眼睛区域,且因此可
以在不到一分钟的成像时间内达到1毫米的平面分辨率。固定的视场尺寸可用于所有患者,因为受试者之间的人眼尺寸变化非常小。眼睛运动可能会使成像过程复杂化,但在mri中已知有许多运动减少和运动补偿的方法,可以用来减轻这种影响。
[0082]
图4a和4b示出了人眼的高分辨率mr成像。尤其是,图4a示出了被定向成与虹膜共面的切片的t2w图像。它包含位于2点钟位置的病变。图4b示出了被定向成垂直于此的t1w图像,再次示出了玻璃体(黑色)、眼球晶状体(灰色)和位于晶状体顶部的虹膜的叶。
[0083]
一旦检测到瞳孔反射的响应反应,镇静评估设备120被配置成基于检测的响应反应来确定患者pat的镇静水平。镇静评估设备120可以包括专用集成电路(asic)、电子电路、执行一个或多个软件或固件程序的处理器(共享、专用或分组)和/或存储器(共享、专用或分组)、组合逻辑电路和/或提供所述功能的其他适合部件或是其一部分。在一示例中,镇静评估设备120可以使用任何一组适当的图像处理方法来评估瞳孔直径。基本任务是找到图像强度大致恒定且在图像中大致居中的圆,并确定其半径。这可以通过基于模型的分割方法来实现,例如,将瞳孔建模为圆,该圆具有以下拟合参数:瞳孔中心在虹膜图像中的x和y位置,瞳孔半径,瞳孔的平均图像强度。该模型的参数可以被约束到共同的尺寸和图像强度。
[0084]
在第二示例中,可以测量响应于抚摸皮肤的浅层反射。浅层反射包括正常足底响应和眉间反射中的至少一种。
[0085]
为了刺激浅层反射的响应反应,医学成像系统还可包括至少一个刺激发生器130,如图1所示的远程触觉装置130a。至少一个刺激发生器130被配置成在患者皮肤上的冲击区域处产生至少一种刺激,以刺激该至少一种反射的响应反应。
[0086]
至少一个刺激发生器130可以包括用于刺激正常足底响应的下列装置中的至少一种:可附接于患者足底的抚摸装置和被配置成从远处在患者足底上的冲击区域处诱发触觉感觉的远程触觉装置。
[0087]
在图1a的示例性示例中,远程触觉装置130a被配置成在不与患者pat物理接触的情况下从远处在患者pat的足底40上的冲击区域处诱发触觉感觉,以刺激正常足底响应。远程触觉装置130a可以安装在成像室内或mr孔10处或mr孔内。引起这种触觉感觉的示例可包括i)空中声学发射器,ii)空中超声触觉发射器,iii)空气喷嘴,iv)电磁波发射器,v)电发射器,vi)磁发射器,和vii)射频发射器。
[0088]
远程触觉装置130a可以利用一个或多个发射器以不同的强度、重复率和/或持续时间产生单个或多个远程轻推,以诱发一个或多个不同的触觉感觉。患者对一个或多个不同的触觉感觉的反应可以是任何已知的镇静患者对常规物理轻推的反应,例如,脚趾的弯曲,这可以由mr成像系统检测到。
[0089]
以基于超声的触觉系统为例,远程触觉装置130a可以包括一个或多个空中超声触觉发射器(未示出),其被配置成导致产生定向或聚焦的超声束,该超声束可以被引导到患者身体上的预期冲击区域。空中超声触觉发射器可产生声学干扰模式,该声学干扰模式导致产生定向超声束,该定向超声束能够在患者的皮肤上在冲击区域处诱发触觉感觉。聚焦的超声波在一定距离处以非侵入性的方式导致产生任何预期的强度、频率和/或持续时间的触摸感觉。在一些实施例中,由相控阵列产生的声场可允许形成体积声场,如可触知的球体或其他几何构造。超声束的方向可以自动或手动地调整,以冲击预期的冲击区域。当在冲
击区域处施加于患者时,患者就会体验到一种感觉,就像指定形状的物理物体与皮肤接触一样。患者没有必要为此暴露裸露的皮肤,因为超声波能够穿过适当的薄衣服(如患者通常穿的医院罩衣)耦合到皮肤上。
[0090]
当然,代替或除空中超声触觉发射器之外,也可以使用其他类型的发射器。例如,在一些实施例中,可以使用一个或多个空气喷嘴来产生气流模式,该气流模式产生能够在冲击区域处在患者的皮肤上诱发触觉感觉的定向空气喷射。直接压缩空气的方法或基于涡旋的方法都可用于模拟触觉感觉。在另一示例中,一个或多个电磁波发射器,如激光,可用于在距激发源一定距离的位置产生触觉效果。电磁波发射器可以是基于脉冲激光的系统,如纳秒激光器,当它施加于皮肤时会唤起触觉感觉。在一些实施例中,可以使用热辐射,因为人类皮肤中的某些受体,例如trpv1,不仅对热有响应,而且对疼痛也有响应。通过依次激发这两种响应,可以引起触觉感觉。这可以通过控制热源来实现,如卤素灯或其他。热源使用一个或多个反射器进行适当的聚焦,并快速地切换焦点。上述发射器实施例可单独使用或组合使用,或以任何子组合使用。
[0091]
患者的反应,如脚趾的弯曲,可由mr成像设备通过捕获脚趾的一系列图像来检测。镇静评估设备可使用任何一组适当的图像处理方法集来评估响应反应,例如,受刺激的身体部位的被诱发的运动,并基于检测到的响应反应来确定患者的镇静水平。
[0092]
替代性地或另外,至少一个刺激发生器130可以是可附接于患者足底的抚摸装置(未示出),以刺激正常足底响应。
[0093]
类似地,至少一个刺激发生器130可以包括用于刺激眉间反射的下列装置中的至少一种:被配置成重复敲击患者的前额的装置和被配置成从远处在患者前额上的冲击区域处诱发触觉感觉的远程触觉装置。
[0094]
在图1a的示例性示例中,可以通过专用装置(未示出)来刺激眉间反射,该专用装置可以与mr头部线圈70集成。图1b中示出了mr头部线圈70的示例。mr头部线圈70可以集成在患者支撑台20中,并可附接到患者的头部。替代性地或另外,可以提供远程触觉装置(未示出),以在不与患者pat物理接触的情况下从远处在患者pat的前额50上的冲击区域处诱发触觉感觉。远程触觉装置可以安装在成像室内或mr孔10处或mr孔内。在一些示例中,远程触觉装置,例如空气喷嘴,可以与mr头线圈70集成,如图1b所示,以产生气流模式,该气流模式产生能够在患者前额上诱发触觉感觉的定向空气喷射。
[0095]
在第三示例中,可以测量响应于疼痛的退缩反射。这可能涉及到至少一个刺激发生器,其在患者皮肤上的冲击区域处诱发突然的缝合疼痛或非常局部的温度诱发的疼痛,以刺激退缩反射。优选的是,该至少一个刺激发生器可与成像模态紧密集成,例如,与患者支架集成的夹捏装置或施加于患者的mr接收线圈。然后,利用磁共振成像设备110a获取反射。
[0096]
可选地,医学成像系统100还可包括控制装置140。控制装置140可被配置成产生控制信号,以控制至少一个刺激发生器,从而刺激至少一种反射的响应反应。该控制信号可以通过物理线缆或无线方式传输。
[0097]
在图1a的示例性示例中,控制装置140被配置成产生控制信号,以控制远程触觉装置130a诱发期望的触觉感觉。例如,控制信号可用于控制患者皮肤上的特定冲击区域处的触觉感觉的强度、重复率和/或持续时间。在一些示例中,控制装置140可以被配置成响应于
从用户界面ui接收到的输入请求而产生控制信号。例如,强度、重复率和/或持续时间中的至少一个或组合可以响应于从用户界面ui接收到的命令而被配置。用户界面ui的示例可以包括但不限于触摸屏、基于按键的界面和操纵杆装置。用户界面ui优选地被布置成远离成像设备,例如在成像室外。替代性地,用户界面ui可以布置在室内。用户界面可被配置成允许远程控制控制装置和/或远程监测检测到的患者反应和/或所确定的镇静水平。例如,一些信息可以被远程发送,以便由麻醉师进一步评估。共享给远程人员的信息可以是触觉触摸或对患者反应的评估。如果刺激发生器包括多个发射器,如多个空中超声发射器,则用户界面ui可包括多个用户界面元件,其允许用户选择和切换不同的发射器,以在不同的冲击区域处诱发触觉/痛觉感觉,从而诱发浅层反射和/或退缩反射。例如,在图1a的示例性示例中,用户可以选择在远程触觉装置130a和专用装置之间切换,以刺激正常足底响应或眉间反射。
[0098]
然而,在其他实施例中,控制装置可以自动控制至少一个刺激发生器。尤其是,控制装置140可以被配置成基于患者的历史数据改变轻推信号的方向和调制中的任何一个或全部。例如,通过对多个患者的历史数据使用机器学习和统计技术,可以定义一系列具有不同梯度的轻推强度,以用于敏感性控制。
[0099]
在图1a的示例性示例中,镇静评估设备120是单独的计算装置。然而,在一些示例中,镇静评估设备120可以是用户界面ui的一部分,例如图5中示出的示例性示例。
[0100]
图5示意性地和示例性地示出了医学成像系统100的另一实施例。在这个示例性实施例中,医学成像设备110是ct扫描仪110b。ct扫描仪110b包括门架112,它能够围绕平行于z方向延伸的旋转轴线r旋转。辐射源114,在本实施例中是x射线管,被安装在门架112上,并设有准直器116,该准直器从辐射源114产生的辐射中形成锥形的辐射束118。辐射穿过位于圆柱形检查区域122内的人类患者pat。在已经穿过检查区域122并因此穿过患者pat后,辐射束118入射到检测装置124上,检索装置包括二维检测表面。此外,检测装置124被安装在门架112上。控制逻辑cl被配置成产生扫描方案,该扫描方案诱使医学成像设备110b(在本实施例中是ct扫描仪)对患者pat的身体部位进行医学扫描。ct扫描仪的进一步示例包括pet-ct扫描仪和spect-ct扫描仪。
[0101]
在图5的示例性ct扫描仪中,适合于镇静监测的反射包括浅层反射和退缩反射中的至少一种。
[0102]
在第一示例中,可以测量响应于抚摸皮肤的浅层反射。浅层反射包括正常足底响应和眉间反射中的至少一种。
[0103]
为了刺激浅层反射的响应反应,医学成像系统100还可包括至少一个刺激发生器130,例如图5中所示的远程触觉装置130b。至少一个刺激发生器130被配置成在患者的皮肤上的冲击区域60a处产生至少一种刺激,以刺激至少一种反射的响应反应。远程触觉装置130b可以安装在成像室内或圆柱形检查区域122处或内。引起这种触觉感觉的示例可包括i)空中声学发射器,ii)空中超声触觉发射器,iii)空气喷嘴,iv)电磁波发射器,v)电发射器,vi)磁发射器,和vii)射频发射器。在一示例中,远程触觉装置130b可以被布置和配置成在不与患者物理接触的情况下从远处在患者pat的足底上的冲击区域处诱发触觉感觉,以刺激足底响应。在另一示例中,远程触觉装置130b可以被布置和配置成在不与患者物理接触的情况下从远处在患者pat的前额上的冲击区域处诱发触觉感觉,以刺激眉间反射。
[0104]
替代性地或另外,也可以使用可附接于患者足底的抚摸装置来刺激正常足底响应。可以使用被配置成重复敲击患者前额的装置来刺激眉间反射。
[0105]
在第二示例中,可以测量响应于疼痛的退缩反射。这可能涉及至少一个刺激发生器,其在患者皮肤上的冲击区域处诱发突然的缝合疼痛或非常局部的温度诱发的疼痛,以刺激退缩反射。例如,至少一个刺激发生器可以与成像模态紧密集成,例如,与患者支架集成的夹捏装置或施加于患者的mr接收线圈。在图5的示例性示例中,至少一个刺激发生器130可以包括加热和/或冷却装置130c,其可附接于患者皮肤上的冲击区域60b,并被配置成加热或冷却冲击区域60b以诱发疼痛感觉。换言之,至少一个刺激发生器可以是可穿戴装置。
[0106]
浅层反射和退缩反射的响应反应可以诱发患者的一个或多个身体部位的运动。例如,在健康的成年人中,足底反射可引起脚趾的向下响应。例如,退缩反射可引起四肢或手指的被诱发的运动。因此,ct扫描仪110b可被配置成获取这些身体部位中的至少一个的一系列图像,以检测被诱发的运动。然后,镇静评估设备120基于检测到的响应反应,例如,患者的身体部位的被诱发的运动,来确定患者的镇静水平。
[0107]
可选地,医学成像系统100还可包括控制装置140,其可以被配置成产生控制信号以控制该至少一个刺激发生器来刺激至少一种反射的响应反应。该控制信号可以通过物理线缆或无线方式传输。
[0108]
在图5的示例性示例中,控制装置140被配置成产生控制信号,以控制远程触觉装置130b诱发期望的触觉感觉。控制装置140也可以被配置成产生控制信号,以控制加热和/或冷却装置130c刺激退缩反射的响应反应。
[0109]
控制装置140可以由用户界面ui控制。例如,控制信号可以响应于从用户界面ui接收到的命令而产生。在一些示例中,用户界面ui可以是计算装置,例如,个人电脑(pc)。镇静评估设备120可以是用户界面ui的一部分。
[0110]
现在参考图6,该图示出了用于评估镇静水平的方法200的流程图。尽管下面描述的步骤与上述系统有关,但这些步骤不必束缚于所描述的系统,下面描述的用于评估镇静水平的方法也可以被理解为其本身的教导。
[0111]
在步骤210中,医学成像设备获取患者身体部位的一系列图像,以检测患者的至少一种反射的响应反应。该至少一种反射选自具有依赖于镇静深度的响应反应的反射。医学成像设备可以是mr成像设备、x射线成像设备和ct成像设备中的至少一种。
[0112]
例如,医学成像设备是mr成像设备。适用于mr成像的反射可包括但不限于瞳孔反射、浅层反射和退缩反射。在一示例中,瞳孔反射可以在mri系统中通过专用虹膜mr成像与常规扫描方案的反复交错进行来测量。在另一示例中,可以测量响应于抚摸皮肤的浅层反射。这可能涉及到专用致动器,其可与成像模态紧密集成,例如施加于患者的mr接收线圈。替代性地,也可以使用远程触觉系统。然后用适合的诊断成像方法获取反射。在另一示例中,可以测量响应于疼痛的退缩反射。这可能涉及到这样的致动器,该致动器诱发突然的缝合疼痛或非常局部的温度诱发的疼痛,并与成像模态紧密集成,例如,与患者支架集成的夹捏装置或施加于患者的mr接收线圈。然后,用mr成像获取反射。
[0113]
例如,医学成像设备是x射线成像设备或ct成像设备。适用于x射线成像或ct成像的反射可以包括但不限于浅层反射和退缩反射,它们可以利用与mr成像类似的方法进行刺
激。x射线成像设备或ct成像设备可以获取患者身体部位的被诱发的运动的一系列低分辨率侦察图像,以检测浅层反射和/或退缩反射的响应反应。
[0114]
应理解的是,对瞳孔反射的静止瞳孔尺寸(max)的测量不需要任何刺激。然而,对于其他反射,如浅层反射和退缩反射,该方法可能涉及激活至少一个刺激发生器以刺激这些反射的响应反应的额外步骤(未示出)。
[0115]
在步骤220中,基于检测到的响应反应来确定患者的镇静水平。任何一组适当的图像处理方法都可以用于评估响应反应,例如,瞳孔直径和/或受刺激身体部位的被诱发的运动,并基于检测到的响应反应来确定患者的镇静水平。
[0116]
在本发明的另一示例性实施例中,提供了一种计算机程序或计算机程序单元,其特征在于适于在适当的系统上执行根据前述实施例之一所述的方法的方法步骤。
[0117]
因此,计算机程序单元可被存储在计算机单元上,其也可以是本发明的实施例的一部分。该计算单元可适于执行或诱导执行上述方法的步骤。此外,它可以适于操作上述设备的部件。该计算单元可适于自动操作和/或执行用户的命令。计算机程序可以被加载到数据处理器的工作存储器中。因此,该数据处理器可被配备成执行本发明的方法。
[0118]
本发明的该示例性实施例既覆盖从一开始就使用本发明的计算机程序,也覆盖通过更新的方式将现有程序变成使用本发明的程序的计算机程序。
[0119]
此外,计算机程序单元能够提供所有必要的步骤来完成如上所述的方法的示例性实施例的操作。
[0120]
根据本发明的另一示例性实施例,提出了一种计算机可读介质,例如cd-rom,其中该计算机可读介质具有存储在其上的计算机程序单元,该计算机程序单元通过前述部分进行了描述。
[0121]
计算机程序可以被存储和/或分布在适合的介质上,例如与其他硬件一起或作为其他硬件的一部分提供的光学存储介质或固态介质,但也可以以其他形式分布,例如通过互联网或其他有线或无线电信系统。
[0122]
然而,计算机程序也可以通过像万维网这样的网络提供,并可以从这样的网络下载到数据处理器的工作存储器中。根据本发明的另一示例性实施例,提供了一种用于使计算机程序单元可供下载的介质,该计算机程序单元被安排成执行根据本发明的前述实施例之一所述的方法。
[0123]
应指出的是,参考不同主题描述了本发明的实施例。尤其是,参考方法类型的权利要求描述了一些实施例,而参考装置类型的权利要求描述了另外的实施例。然而,本领域技术人员将从上文和下文描述中得出,除非另有指示,否则除了属于一种类型的主题的特征的任何组合之外,与不同主题相关的特征之间的任何组合也被认为由本技术公开。然而,所有特征都可以组合,从而提供多于特征的简单加和的协同效果。
[0124]
尽管已经在附图和前面的描述中例示说明和描述了本发明,但这样的例示说明和描述被认为是例示说明性的或示例性的而非限制性的。本发明不限于所公开的实施例。通过研究附图、公开内容和从属权利要求,本领域技术人员在实践所要求保护的本发明时,能够理解并实现所公开的实施例的其他变型。
[0125]
在权利要求中,“包括”一词不排除其他元件或步骤,并且不定冠词“一”或“一个”不排除多个。单个处理器或其他单元可以实现在权利要求中记载的若干项的功能。仅在互
不相同的从属权利要求中记载某些措施并不表示不能有利地使用这些措施的组合。权利要求中的任何附图标记不应解释为限制范围。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。