距离测量装置、电子设备和制造距离测量装置的方法
1.相关申请的交叉引用
2.本技术要求2019年8月20日提交的日本优先权专利申请jp2019-150228的权益,其全部内容通过引用结合于此。
技术领域
3.本技术涉及一种测量到物体的距离的距离测量装置。更具体地,本技术涉及一种距离测量装置、一种电子设备以及一种用于制造适合用于移动设备的距离测量装置的方法。
背景技术:
4.传统上,在具有距离测量功能的电子设备中,经常使用称为飞行时间(tof)的距离测量方法。该tof是一种方法,其中,发光单元用正弦波或矩形波照射光照射物体,光接收单元接收来自物体的反射光,距离测量操作部分根据照射光和反射光之间的相位差测量距离。已知一种光学模块,其中,发光元件和用于驱动发光元件的电子半导体芯片容纳在壳体中并集成,以便实现如上所述的距离测量功能。例如,已经提出了一种光学模块,包括:排列并安装在基板的电极图案上的激光二极管阵列;以及电连接到激光二极管阵列的驱动器集成电路(ic)(例如,参见专利文献1)。
5.引用列表
6.专利文献
7.专利文献1:jp 2009-170675a
技术实现要素:
8.技术问题
9.在上述相关技术中,激光二极管阵列和驱动器ic被集成并配置为光学模块。然而,在该相关技术中,激光二极管阵列和驱动器ic通过多条导线电连接,并且其间的布线电感增加,由此存在半导体激光器的驱动波形可能失真的可能性。这对于以数百兆赫驱动的tof尤其成问题。
10.鉴于这种情况,已经开发了本技术,并且期望通过使用具有用于降低半导体激光器和激光驱动器之间的布线电感的结构的发光单元和光接收单元来提供小型且高灵敏度的距离测量装置。
11.问题的解决方案
12.根据本技术的一个实施例,提供了一种距离测量装置和一种具有该距离测量装置的电子设备,该装置包括:基板,在所述基板内置有激光驱动器;半导体激光器,所述半导体激光器安装在基板的一个表面上并发射照射光;连接布线,所述连接布线以0.5nh或更小的布线电感电连接激光器驱动器和半导体激光器;以及光接收单元,所述光接收单元接收从物体到照射光的反射光。这带来了以0.5nh或更小的布线电感电连接激光器驱动器和半导
体激光器的效果。
13.此外,在该实施例中,距离测量装置可以还包括距离测量操作部分,该距离测量操作部分基于照射光和反射光测量到物体的距离。
14.此外,在该实施例中,光接收单元可以形成在刚性柔性印刷线路板中的刚性板上,所述刚性板和柔性线路板集成在所述刚性柔性印刷线路板上,并且所述光接收单元可以经由柔性线路板连接到内置有激光驱动器的基板。这带来了通过使用刚性柔性印刷线路板将发光单元和光接收单元形成为距离测量装置的效果。
15.此外,在该实施例中,所述内置有激光驱动器的基板和所述光接收单元可以形成在同一公共基板上。这带来了在公共基板上一体形成发光单元和光接收单元作为距离测量装置的效果。在这种情况下,作为公共基板,例如,假设主板或执行到主板的中继的内插器。
16.此外,在该实施例中,光接收单元可以形成在内置有激光驱动器的基板上。这带来了在发光单元的基板上一体形成光接收单元的效果。
17.此外,在该实施例中,距离测量装置还包括透射窗口,所述透射窗口透射照射光和反射光,其中,来自发光单元的照射光的角度和光接收单元的光接收视角理想地直到透射窗口的位置都不彼此重叠。这带来了防止(或减少)从发光单元发射的照射光在透射窗口上反射并入射到光接收单元上的效果。
18.此外,在该实施例中,连接布线理想地具有0.5mm或更小的长度。此外,连接布线更优选地为0.3mm或更小。
19.此外,在该实施例中,连接布线可以通过设置在基板上的连接通孔。这带来了缩短布线长度的效果。
20.此外,在该实施例中,半导体激光器的一部分可以被设置为在激光驱动器上方重叠。在这种情况下,半导体激光器的50%或更小面积的一部分可以被设置成与其上方的激光驱动器重叠。
21.此外,根据本技术实施例的用于制造距离测量装置的方法包括:在支撑板的上表面上形成激光驱动器;形成激光驱动器的连接布线并形成内置有激光驱动器的基板;将发射照射光的半导体激光器安装在基板的一个表面上,并且形成连接布线,所述连接布线经由连接布线以0.5nh或更小的布线电感电连接激光器驱动器和半导体激光器;以及形成光接收单元,所述光接收单元接收从物体到照射光的反射光。这带来了制造距离测量装置的效果,该距离测量装置以0.5nh或更小的布线电感电连接激光驱动器和半导体激光器。根据本技术的实施例,一种装置,包括:第一基板;第二基板,所述第二基板在第一基板上;以及发光装置,包括:光源,所述光源在第二基板上并且向物体发射光。发光装置包括设置在第二基板中并驱动光源的驱动器。在平面图中,驱动器的一部分与光源的第一部分重叠。该装置包括成像装置,该成像装置在第一基板上邻近发光装置,并且感测从物体反射的光。发光装置还包括至少一个第一通孔,所述第一通孔设置在第二基板中,并且在平面图中与光源的第二部分重叠。所述至少一个第一通孔延伸穿过第二基板。发光装置还包括至少一个第二通孔,所述第二通孔设置在第二基板中,将光源电连接到驱动器。发光装置还包括在第二基板上的至少一个无源元件。该装置还包括支撑结构,所述支撑结构围绕至少一个无源元件和光源。该装置还包括由支撑结构支撑的光学元件。光学元件漫射从光源发射的光。支撑结构安装到第二基板。驱动器在平面图中与至少一个无源元件的一部分重叠。至少一个无
源元件包括去耦电容器。光源的第一部分小于光源表面表面积的50%。光源包括激光器。成像装置的覆盖区大于发光装置的覆盖区。根据本技术的实施例,一种装置,包括:发光装置,该发光装置包括:光源,所述光源在第一基板上并且向物体发射光;以及驱动器,所述驱动器设置在第一基板中并驱动光源。所述驱动器的一部分在平面图中与小于50%的光源重叠。该装置包括成像装置,所述成像装置感测从物体反射的光。该装置还包括第二基板,并且成像装置和第一基板安装在第二基板上。发光装置还包括至少一个第一通孔,所述第一通孔设置在第二基板中,并且在平面图中与光源重叠。至少一个第一通孔延伸穿过第一基板。发光装置还包括至少一个第二通孔,所述第二通孔设置在第二基板中,将光源电连接到驱动器。
22.根据本技术的实施例,一种装置,包括:第一基板;以及发光装置,包括:光源,所述光源在第一基板上并且向物体发射光;以及驱动器,所述驱动器设置在第二基板中并驱动光源。所述驱动器的一部分在平面图中与光源的第一部分重叠。该装置包括第二基板;以及成像装置,所述成像装置在第二基板上,并且感测从物体反射的光。该装置还包括连接器,所述连接器将发光装置电连接到成像装置。
附图说明
23.[图1]图1是示出根据本技术实施例的距离测量模块的配置示例的示图;
[0024]
[图2]图2是示出根据本技术实施例的发光单元的俯视图的示例的示图;
[0025]
[图3]图3是示出根据本技术实施例的发光单元的剖视图的示例的示图;
[0026]
[图4a]图4a是示出根据本技术实施例的激光驱动器和半导体激光器之间的重叠量的定义的示图;
[0027]
[图4b]图4b是示出根据本技术的实施例的激光驱动器和半导体激光器之间的重叠量的定义的示图;
[0028]
[图4c]图4c是示出根据本技术的实施例的激光驱动器和半导体激光器之间的重叠量的定义的示图;
[0029]
[图5]图5是示出在通过添加法形成布线图案的情况下,布线电感相对于布线长度和布线宽度的数值示例的示图;
[0030]
[图6]图6是示出在通过减法形成布线图案的情况下,布线电感相对于布线长度和布线宽度的数值示例的示图;
[0031]
[图7a]图7a是示出根据本技术实施例的激光驱动器的制造过程中处理铜焊盘和铜布线层(再分布层:rdl)的步骤的示例的第一视图;
[0032]
[图7b]图7b是示出在根据本技术实施例的激光驱动器的制造过程中处理铜焊盘和铜布线层(再分布层:rdl)的步骤的示例的第一视图;
[0033]
[图7c]图7c是示出在根据本技术实施例的激光驱动器的制造过程中处理铜焊盘和铜布线层(再分布层:rdl)的步骤的示例的第一视图;
[0034]
[图8a]图8a是示出在根据本技术实施例的激光驱动器的制造过程中处理铜焊盘和铜布线层(再分布层:rdl)的步骤的示例的第二视图;
[0035]
[图8b]图8b是示出在根据本技术实施例的激光驱动器的制造过程中处理铜焊盘和铜布线层(再分布层:rdl)的步骤的示例的第二视图;
[0036]
[图8c]图8c是示出在根据本技术实施例的激光驱动器的制造过程中处理铜焊盘和铜布线层(再分布层:rdl)的步骤的示例的第二视图;
[0037]
[图9a]图9a是示出根据本技术的实施例的基板的制造过程的示例的第一视图;
[0038]
[图9b]图9b是示出根据本技术的实施例的基板的制造过程的示例的第一视图;
[0039]
[图9c]图9c是示出根据本技术的实施例的基板的制造过程的示例的第一视图;
[0040]
[图9d]图9d是示出根据本技术的实施例的基板的制造过程的示例的第一视图;
[0041]
[图10a]图10a是示出根据本技术的实施例的基板的制造过程的示例的第二视图;
[0042]
[图10b]图10b是示出根据本技术的实施例的基板的制造过程的示例的第二视图;
[0043]
[图10c]图10c是示出根据本技术的实施例的基板的制造过程的示例的第二视图;
[0044]
[图10d]图10d是示出根据本技术的实施例的基板的制造过程的示例的第二视图;
[0045]
[图11a]图11a是示出根据本技术的实施例的基板的制造过程的示例的第三视图;
[0046]
[图11b]图11b是示出根据本技术的实施例的基板的制造过程的示例的第三视图;
[0047]
[图11c]图11c是示出根据本技术的实施例的基板的制造过程的示例的第三视图;
[0048]
[图12a]图12a是示出根据本技术的实施例的基板的制造过程的示例的第四视图;
[0049]
[图12b]图12b是示出根据本技术的实施例的基板的制造过程的示例的第四视图;
[0050]
[图12c]图12c是示出根据本技术的实施例的基板的制造过程的示例的第四视图;
[0051]
[图13a]图13a是示出根据本技术的实施例的基板的制造过程的示例的第五视图;
[0052]
[图13b]图13b是示出根据本技术的实施例的基板的制造过程的示例的第五视图;
[0053]
[图13c]图13c是示出根据本技术的实施例的基板的制造过程的示例的第五视图;
[0054]
[图14]图14是示出根据本技术实施例的距离测量模块的安装结构的第一示例的剖视图;
[0055]
[图15]图15是示出根据本技术实施例的距离测量模块的安装结构的第二示例的剖视图;
[0056]
[图16]图16是示出根据本技术实施例的距离测量模块的安装结构的第三示例的剖视图;
[0057]
[图17]图17是示出根据本技术实施例的距离测量模块的假设尺寸的示例的剖视图;
[0058]
[图18a]图18a是示出根据本技术实施例的距离测量模块的俯视图的示例的示图;
[0059]
[图18b]图18b是示出根据本技术实施例的图18a中的距离测量模块的安装结构的示例的剖视图;
[0060]
[图19]图19是示出作为本技术的实施例的应用示例的电子设备的系统配置示例的示图;
[0061]
[图20]图20是示出作为本技术的实施例的应用示例的电子设备的外部配置示例的示图。
具体实施方式
[0062]
在下文中,将描述用于实现本技术的模式(以下称为实施例)。将按以下顺序进行描述。
[0063]
1.实施例(距离测量模块)
[0064]
2.应用示例(电子设备)
[0065]
《1.实施例》
[0066]“距离测量模块的配置”[0067]
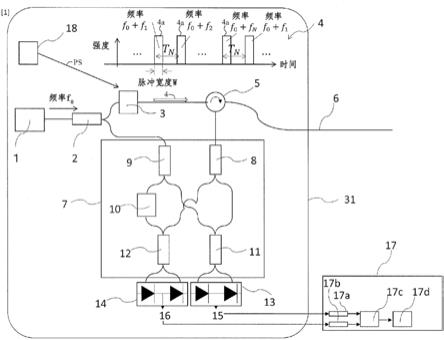
图1是示出根据本技术实施例的距离测量模块19的配置示例的示图。
[0068]
距离测量模块19通过tof方法测量距离,并且包括发光单元11(或发光装置)、光接收单元(或光检测装置或成像装置)12、发光控制器13和距离测量操作部分14。
[0069]
发光单元11发射亮度周期性变化的照射光,并用该光照射物体20。发光单元11与例如矩形波发光控制信号clkp同步地生成照射光。此外,例如,激光器或发光二极管用作发光单元11,并且波长在780nm至1000nm范围内的红外光或近红外光用作照射光。注意,发光控制信号clkp不限于矩形波,只要是周期信号即可。例如,发光控制信号clkp可以是正弦波。
[0070]
发光控制器13控制照射光的照射时间。发光控制器13生成发光控制信号clkp,并将生成的信号提供给发光单元11和光接收单元12。此外,发光控制信号clkp可以由光接收单元12生成,并且在这种情况下,由光接收单元12生成的发光控制信号clkp由发光控制器13放大并提供给发光单元11。发光控制信号clkp的频率例如是100兆赫(mhz)。注意,发光控制信号clkp的频率不限于100mhz,而是可以是200mhz等。此外,发光控制信号clkp可以是单端信号或差分信号。
[0071]
光接收单元12接收从物体20反射的光,并且每当周期过去时,检测在垂直同步信号的周期内接收的光量。例如,60hz的周期信号用作垂直同步信号。此外,在光接收单元12中,多个像素电路以二维点阵排列。光接收单元12将由对应于由这些像素电路接收的光量的多条像素数据组成的图像数据(帧)提供给距离测量操作部分14。注意,垂直同步信号的频率不限于60hz,而是例如可以是30hz或120hz。
[0072]
距离测量操作部分14基于图像数据通过tof方法测量到物体20的距离。距离测量操作部分14测量每个像素电路的距离,并通过每个像素的灰度值生成指示到物体20的距离的深度图。该深度图用于例如图像处理和自动聚焦(af)处理,图像处理用于以根据距离在一定程度上执行模糊处理,自动聚焦处理用于根据距离获得聚焦镜头的焦点。此外,深度图有望用于手势识别、对象识别、障碍物检测、增强现实(ar)、虚拟现实(vr)等。
[0073]“发光单元的配置”[0074]
图2是示出根据本技术实施例的发光单元11的俯视图的示例的示图。
[0075]
假设该发光单元11通过tof测量距离。tof具有深度精度高的特点,尽管没有结构光高,并且即使在黑暗的环境中也能正常工作。此外,与结构光和立体摄像机等其他方法相比,tof被认为在装置配置的简单性和成本方面具有许多优点。
[0076]
在发光单元11中,半导体激光器(或光源)300、光电二极管400和无源元件500通过引线接合电连接并安装在内置有激光驱动器200的基板100的表面上。假设印刷线路板是基板100。
[0077]
半导体激光器300是通过允许电流流过化合物半导体的p-n结来发射激光的半导体装置。在此处,作为要使用的化合物半导体,例如,假设砷化铝镓(algaas)、砷化铟镓磷(ingaasp)、铝镓铟磷(algainp)、氮化镓(gan)等。
[0078]
激光驱动器200是用于驱动半导体激光器300的驱动器集成电路(ic)。激光驱动器
200以面朝上的状态内置在基板100中。至于与半导体激光器300的电连接,由于需要降低布线电感,希望使布线长度尽可能短。将在后面描述其具体数值。
[0079]
光电二极管400是用于检测光的二极管。光电二极管400用于自动功率控制(apc),用于监控半导体激光器300的光强并保持半导体激光器300的输出恒定。
[0080]
无源元件500是除了诸如电容器和电阻器等有源元件之外的电路元件。无源元件500包括用于驱动半导体激光器300的去耦电容器。
[0081]
图3是示出根据本技术实施例的发光单元11的剖视图的示例的示图。
[0082]
如上所述,基板100具有内置的激光驱动器200,并且具有安装在表面上的半导体激光器300等。经由连接通孔101实现半导体激光器300和激光驱动器200之间的连接。通过使用连接通孔101,可以缩短布线长度。注意,连接通孔101是权利要求中列举的连接布线的示例。
[0083]
此外,基板100包括用于热辐射的热通孔102。安装在基板100上的每个元件是热源,并且通过使用热通孔102,每个元件中产生的热量可以从基板100的后表面辐射。
[0084]
安装在基板100表面上的半导体激光器300、光电二极管400和无源元件500被侧壁(或支撑结构)600包围。作为侧壁600的材料,例如,采用塑料材料或金属。
[0085]
由侧壁600包围的上表面被扩散板700覆盖。扩散板700是用于扩散来自半导体激光器300的激光的光学元件,并且也被称为扩散器。
[0086]
图4a至图4c是均示出根据本技术的实施例的激光驱动器200和半导体激光器300之间的重叠量的定义的示图。
[0087]
如上所述,由于假设经由连接通孔101实现半导体激光器300和激光驱动器200之间的连接,所以从顶部看,半导体激光器300和激光驱动器200被设置为重叠。另一方面,热通孔102理想地设置在半导体激光器300的下表面上,并且需要确保该区域。因此,为了阐明激光驱动器200和半导体激光器300之间的位置关系,如下定义它们之间的重叠量。
[0088]
在图4a所示的设置中,从上方看,在激光驱动器200或半导体激光器300中没有重叠区域。在这种情况下,重叠量定义为0%。另一方面,在图4c所示的设置中,从上方看,整个半导体激光器300与激光驱动器200重叠。在这种情况下,重叠量被定义为100%。
[0089]
然后,在图4b所示的设置中,从上方看,半导体激光器300的一半区域与激光驱动器200重叠。在这种情况下,重叠量被定义为50%。
[0090]
在本实施例中,为了提供用于上述连接通孔101的区域,重叠量理想地大于0%。另一方面,考虑到一定数量的热通孔102设置在半导体激光器300的正下方,重叠量理想地为50%或更少。因此,通过将重叠量设定为大于0%和50%或更少,可以降低布线电感并获得有利的热辐射特性。
[0091]“布线电感”[0092]
如上所述,在半导体激光器300和激光器驱动器200之间的连接中,布线电感是有问题的。所有导体都有电感元件,在tof系统这样的高频区域,即使是非常短的导线的电感也会产生不利影响。也就是说,在高频操作时,由于布线电感的影响,用于从激光驱动器200驱动半导体激光器300的驱动波形可能失真,并且操作可能不稳定。
[0093]
在此处,将考虑计算布线电感的理论公式。例如,在自由空间中,具有长度为l[mm]和半径为r[mm]的圆形截面的线性导线的电感idc[μh]由以下等式表示。在此处,ln代表自
然对数。
[0094]
idc=0.0002l
·
(ln(2l/r)-0.75)
[0095]
此外,例如,在自由空间中,具有长度l[mm]、宽度w[mm]和厚度h[mm]的带状线(基板布线图案)的电感idc[μh]由以下等式表示。
[0096]
idc=0.0002l
·
(ln(2l/(w h))
[0097]
0.2235((w h)/l) 0.5)
[0098]
图5和图6示出了内置在印刷线路板内的激光驱动器和电连接到印刷线路板上部的半导体激光器之间的布线电感[nh]的试验计算。
[0099]
图5是示出在通过添加法形成布线图案的情况下,布线电感相对于布线长度l和布线宽度w的数值示例的示图。添加法是通过仅在绝缘树脂表面的必要部分沉积铜来形成图案的方法。
[0100]
图6是示出在通过减法形成布线图案的情况下,布线电感相对于布线长度l和布线宽度w的数值示例的示图。减法是通过蚀刻覆铜板的不必要部分来形成图案的方法。
[0101]
在诸如tof系统等距离测量模块的情况下,假设以几百兆赫驱动模块,布线电感理想地为0.5nh或更小,更优选地为0.3nh或更小。因此,考虑到上述计算结果,认为半导体激光器300和激光驱动器200之间的布线长度理想地为0.5mm或更小,更优选0.3mm或更小。
[0102]“制造方法”[0103]
图7a至图7c和图8d至图8f是均示出根据本技术实施例的激光驱动器200的制造过程中处理铜焊盘和铜布线层(再分布层:rdl)的步骤的示例的示图。
[0104]
首先,如图7a所示,包括例如铝等的输入/输出(i/o)焊盘210形成在半导体晶片上。然后,在表面上形成诸如sin等保护绝缘层220,并且打开i/o焊盘210的区域。
[0105]
接下来,如图7b所示,形成包括聚酰亚胺(pi)或聚苯并噁唑(pbo)的表面保护膜230,并且打开i/o焊盘210的区域。
[0106]
接下来,如图7c所示,连续溅射大约几十到几百纳米的钛钨(tiw)和大约十万到几千纳米的铜(cu),以形成粘附层-种子层240。在此处,除了钛钨(tiw)之外,诸如铬(cr)、镍(ni)、钛(ti)、钛铜(ticu)或铂(pt)等高熔点金属或其合金可以施加到粘合层。此外,除了铜(cu)之外,镍(ni)、银(ag)、金(au)或其合金可以施加到种子层。
[0107]
接下来,如图8a所示,光致抗蚀剂250被图案化,以便形成用于电结合的铜焊盘和铜布线层。具体地,通过表面清洁、抗蚀剂涂覆、干燥、曝光和显影的每个步骤来执行形成。
[0108]
接下来,如图8b所示,通过电镀方法在粘合层-种子层240上形成用于电结合的铜焊盘-铜布线层(rdl)260。在此处,作为电镀方法,例如,可以使用电解镀铜方法、电解镀镍方法等。此外,期望铜焊盘的直径为大约50至100μm,铜布线层的厚度为大约3至10μm,并且铜布线层的最小宽度为大约10μm。
[0109]
接下来,如图8c所示,去除光致抗蚀剂250,并且掩蔽半导体芯片的铜焊盘-铜布线层(rdl)260,并且执行干法蚀刻。在此处,作为干蚀刻,例如,可以使用用氩离子束进行照射的离子研磨。通过干法蚀刻,可以选择性地去除不必要区域中的粘附层-种子层240,并且铜焊盘和铜布线层彼此分离。注意,尽管可以通过用王水、硝酸铈铵或氢氧化钾的水溶液等进行湿法蚀刻来去除不需要的区域,但是考虑到构成铜焊盘和铜布线层的金属层的侧面蚀刻和厚度减小,干法蚀刻是更理想的。
[0110]
图9a至图13c是均示出根据本技术实施例的基板100的制造过程的示例的示图。
[0111]
首先,如图9a所示,具有超薄铜箔132和载体铜箔131的两层结构的可剥离铜箔130经由粘合树脂层120通过滚轧层压或层压压制热压结合在支撑板110的一侧上。
[0112]
作为支撑板110,可以使用包括无机材料、金属材料、树脂材料等的基板。例如,可以使用硅(si)、玻璃、陶瓷、铜、铜基合金、铝、铝合金、不锈钢、聚酰亚胺树脂和环氧树脂。
[0113]
作为可剥离铜箔130,使用通过将厚度为18至35μm的载体铜箔131真空粘合至厚度为2至5μm的超薄铜箔132而形成的铜箔。作为可剥离铜箔130,例如,可以使用3fd-p3/35(由furukawa circuit foil有限公司制造)、mt-18s5dh(由mitsui mining&smelting有限公司制造)等。
[0114]
作为粘合树脂层120的树脂材料,可以使用包含玻璃纤维增强材料的有机树脂,例如,环氧树脂、聚酰亚胺(ppe)树脂、聚苯醚(ppe)树脂、酚醛树脂、聚四氟乙烯(ptfe)树脂、硅树脂、聚丁二烯树脂、聚酯树脂、三聚氰胺树脂、脲树脂、聚苯硫醚(pps)树脂或聚苯醚(ppo)树脂。此外,作为增强材料,除了玻璃纤维之外,还可以使用芳族聚酰胺无纺布、芳族聚酰胺纤维、聚酯纤维等。
[0115]
接下来,如图9b所示,通过无电镀铜处理,在可剥离铜箔130的超薄铜箔132的表面上形成厚度为0.5至3μm的电镀底层导电层(未示出)。注意,该化学镀铜处理形成导电层,作为电解镀铜的基础,用于在下一步骤中形成布线图案。然而,可以省略该无电镀铜处理,并且可以通过使用于电解镀铜的电极与可剥离铜箔130直接接触以直接在可剥离铜箔130上执行电解镀铜处理,来形成布线图案。
[0116]
接下来,如图9c所示,光敏抗蚀剂通过辊压附着到支撑板的表面,以形成用于布线图案的抗蚀剂图案(阻焊层140)。作为光敏抗蚀剂,例如,可以使用干膜的抗镀剂。
[0117]
接下来,如图9d所示,通过电解镀铜处理形成厚度约为15μm的布线图案150。
[0118]
接下来,如图10a所示,剥离抗镀剂。然后,作为形成层间绝缘树脂的预处理,对布线图案的表面进行粗糙化处理,以提高层间绝缘树脂和布线图案之间的粘附力。注意,粗糙化处理可以通过使用过硫酸系统的氧化还原处理或软蚀刻处理的黑化处理来执行。
[0119]
接下来,如图10b所示,层间绝缘树脂161通过辊压或层压压机热压结合在布线图案上。例如,厚度为45μm的环氧树脂被辊压。在使用玻璃环氧树脂的情况下,具有自由选择厚度的铜箔被堆叠并通过层压压机热压结合。作为层间绝缘树脂161的树脂材料,可以使用有机树脂,例如,环氧树脂、聚酰亚胺树脂、ppe树脂、酚醛树脂、ptfe树脂、硅树脂、聚丁二烯树脂、聚酯树脂、三聚氰胺树脂、脲树脂、pps树脂或ppo树脂。此外,这些树脂可以单独使用,或者可以使用通过混合多种树脂或形成化合物获得的树脂的组合。此外,也可以使用层间绝缘树脂,其中,无机填料包含在这些材料中,或者混合玻璃纤维增强材料。
[0120]
接下来,如图10c所示,通过激光方法或光刻方法形成用于层间电连接的通孔。在层间绝缘树脂161是热固性树脂的情况下,通过激光方法形成通孔。作为激光,可以使用紫外激光器,例如,谐波钇铝石榴石(yag)激光器或准分子激光器,或者使用红外激光器,例如,二氧化碳气体激光器。注意,在通过激光形成通孔的情况下,薄树脂膜可能保留在通孔的底部,因此进行去污处理。在这种去垢处理中,树脂被强碱溶胀,并且使用氧化剂(例如,铬酸或高锰酸盐水溶液)分解和除去树脂。此外,树脂也可以通过等离子体处理或用研磨剂进行喷砂处理来去除。在层间绝缘树脂161是光敏树脂的情况下,通过光刻方法形成通孔
170。也就是说,通过使用通过掩模的紫外光进行曝光,然后显影,形成通孔170。
[0121]
接下来,在粗糙化处理之后,在通孔170的壁表面和层间绝缘树脂161的表面上执行化学镀处理。接下来,通过辊压将光敏抗蚀剂附着到层间绝缘树脂161的表面,使其表面经受化学镀处理。作为这种情况下的光敏抗蚀剂,例如,可以使用干膜的光敏抗镀剂膜。光敏抗镀膜曝光,然后被显影,以形成抗镀图案,其中,打开通孔170的一部分和布线图案的一部分。接下来,抗镀剂图案的开口部分经受厚度为15μm的电解镀铜处理。然后,通过剥离抗镀剂并通过过硫酸系统等的快速蚀刻去除残留在层间绝缘树脂上的化学镀,形成如图10d所示的填充有镀铜的通孔170和布线图案。然后,重复执行用于布线图案的类似粗糙化步骤和用于层间绝缘树脂162的类似形成步骤。
[0122]
接下来,如图11a所示,以面朝上的状态安装具有管芯附着膜(daf)290的激光驱动器200,该管芯附着膜具有减薄至约30至50μm厚度的经处理的铜焊盘和铜布线层。
[0123]
接下来,如图11b所示,层间绝缘树脂163通过辊压或层压压机热压结合。
[0124]
接下来,如图11c和图12a所示,执行与在此之前执行的处理类似的通孔处理、去污处理、粗糙化处理、化学镀处理和电解电镀处理。注意,激光驱动器200的铜焊盘中的浅通孔171的处理、低一级的深通孔172的处理、去污处理和粗糙化处理同时进行。
[0125]
在此处,浅通孔171是用镀铜填充的填充通孔。通孔的尺寸和深度各约为20至30μm。此外,焊盘的尺寸直径约为60至80μm。
[0126]
另一方面,深通孔172是所谓的共形通孔,其中,铜仅镀在通孔的外侧。通孔的尺寸和深度各约为80至150μm。焊盘的尺寸直径约为150至200μm。注意,深通孔172理想地通过距离激光驱动器200的外形大约100μm的绝缘树脂设置。
[0127]
接下来,如图12b所示,通过辊压或层压压机将与在此之前使用的层间绝缘树脂类似的层间绝缘树脂热压结合。此时,共形通孔的内部填充有层间绝缘树脂。接下来,执行与在此之前执行的处理类似的通孔处理、去污处理、粗糙化处理、化学镀处理和电解电镀处理。
[0128]
接下来,如图12c所示,通过剥离可剥离铜箔130的载体铜箔131和超薄铜箔132之间的界面来分离支撑板110。
[0129]
接下来,如图13a所示,使用基于硫酸-过氧化氢的软蚀刻去除超薄铜箔132和电镀下层导电层,从而可以获得具有暴露布线图案的内置部件的基板。
[0130]
接下来,如图13b所示,在暴露的布线图案上印刷布线图案的焊盘部分中具有开口的图案的阻焊层180。注意,阻焊层180也可以通过使用薄膜类型的辊涂机形成。接下来,在阻焊层180中的开口的焊盘部分上以3μm或更大形成无电镀镍,并且在其上以0.03μm或更大形成无电镀金。可以在1μm或更高的温度下形成无电镀金。此外,还可以在其上预涂焊料。或者,可以在3μm或更大的阻焊层180的开口中形成电解镀镍,并且可以在0.5μm或更大的开口上形成电解镀金。此外,除了金属电镀之外,有机防锈(或还原)膜可以形成在阻焊层180的开口中。
[0131]
此外,可以在用于外部连接的焊盘上印刷并施加膏状焊料,作为连接端子,并且可以安装焊球的球栅阵列(bga)。此外,作为连接端子,可以使用铜芯球、铜柱凸点、焊盘栅格阵列(lga)等。
[0132]
如图13c所示,半导体激光器300、光电二极管400和无源元件500安装在如此制造
的基板100的表面上,并且附接侧壁600和扩散板700。一般来说,在以集合基板的形式执行工艺之后,用划片机等处理外部形状,以将其分离成单独的片。
[0133]
注意,已经在使用可剥离铜箔130和支撑板110的上述步骤中描述了该示例,但是代替这些,也可以使用覆铜板(ccl)。此外,作为将元件内置在基板中的制造方法,可以使用在基板中形成空腔并安装元件的方法。
[0134]“距离测量模块的安装结构”[0135]
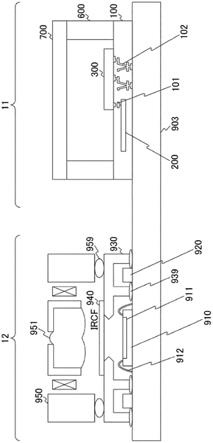
图14是示出根据本技术实施例的距离测量模块19的安装结构的第一示例的剖视图。
[0136]
第一示例中的距离测量模块19具有安装结构,其中,发光单元11和光接收单元12分开制造,然后经由连接器909连接。
[0137]
如上所述,发光单元11通过经由连接通孔101电连接半导体激光器300和激光器驱动器200来降低布线电感。在第一示例中,发光单元11形成在基板901上。基板901设置有连接器909,并且发光单元11经由连接器909电连接到光接收单元12。
[0138]
光接收单元12形成在基板902上,并且包括光接收元件910、无源元件920、框架元件930、红外截止滤波器940和镜头单元950。
[0139]
光接收元件910在有效像素911处接收来自物体的反射光,将图像形成为图像,并生成和输出图像数据。光接收元件910安装在有效像素911的光接收表面后侧的基板902上。光接收元件910通过布线912电连接到基板902。
[0140]
无源元件920是排除诸如电容器和电阻器等有源元件的电路元件。
[0141]
框架元件930是用作安装镜头单元950的框架的元件。框架元件930使用环氧树脂、尼龙树脂、液晶聚合物(lcp)树脂、聚碳酸酯树脂等来配置。框架元件930用粘合剂939连接到基板902。
[0142]
红外截止滤波器(ircf)940是去除从镜头单元950的镜头951入射的光中包括的红外光的滤波器。红外截止滤波器940形成在框架元件930的开口处。
[0143]
镜头单元950容纳镜头951。镜头单元950可以通过在垂直方向上移动镜头951来调整要形成的图像的焦点位置、变焦等。红外截止滤波器940从镜头单元950的镜头951入射的光中移除红外光,并且光入射到光接收元件910的有效像素911上。镜头单元950用粘合剂959结合到框架元件930。
[0144]
第一示例中的光接收单元12的基板902形成为刚性柔性印刷线路板。通过集成硬刚性板和可弯曲柔性线路板而获得这种刚性柔性印刷线路板。在此处,光接收单元12形成在刚性板上。同时,刚性柔性印刷线路板的柔性线路板(柔性部分)电连接到发光单元11的基板901上的连接器909,使得可以形成包括发光单元11和光接收单元12的距离测量模块19。
[0145]
由于该图是剖视图,镜头单元950和框架元件930被示出为存在于左侧和右侧,但是镜头单元950和框架元件930一体形成。此外,无源元件920不一定需要存在于刚性柔性印刷线路板上。
[0146]
注意,光接收单元12的结构是示例,并且不限于此处描述的结构。
[0147]
图15是示出根据本技术实施例的距离测量模块19的安装结构的第二示例的剖视图。
[0148]
在根据第二示例的距离测量模块19中,发光单元11和光接收单元12安装在相同的主板或对主板执行中继的内插器上。在下文中,内插器或主板被描述为基板903。注意,基板903是权利要求中列举的公共基板的示例。
[0149]
如上所述,发光单元11通过经由连接通孔101电连接半导体激光器300和激光器驱动器200来降低布线电感。在第二示例中,发光单元11形成在基板903上。
[0150]
光接收单元12具有类似于第一示例的配置。光接收单元12的光接收元件910通过例如板上芯片(cob)安装在基板903上。也就是说,通过使用环氧树脂或硅树脂管芯附着材料,光接收元件910作为裸芯片直接安装在基板903上。
[0151]
例如,在芯片级封装(csp)的情况下,光接收元件910可以通过大规模回流(批量回流)安装在基板903上。在这种情况下,通过将光接收元件910安装在基板903上,然后共同执行回流加热,以熔化焊料,光接收元件910的背面结合到基板903并安装。
[0152]
图16是示出根据本技术实施例的距离测量模块19的安装结构的第三示例的剖视图。
[0153]
根据第三示例的距离测量模块19具有这样的结构,其中,光接收单元12也安装在内置有发光单元11的激光驱动器200的基板904上。
[0154]
如上所述,发光单元11通过经由连接通孔101电连接半导体激光器300和激光器驱动器200来降低布线电感。在第三示例中,发光单元11的激光驱动器200内置在基板904中。
[0155]
光接收单元12具有类似于第一示例的配置。此外,类似于上述第二示例,光接收单元12的光接收元件910可以通过cob安装在基板904上,或者可以通过大规模回流安装在基板904上。
[0156]“发光单元和光接收单元之间的关系”[0157]
图17是示出根据本技术的实施例的距离测量模块19的假定尺寸的示例的剖视图。注意,该示例基于上述第一示例。
[0158]
在距离测量模块19的主体侧,提供透明玻璃或树脂窗口990来保护距离测量模块19。可以提供窗口990,作为存储距离测量模块19的电子设备的一部分。在此处,为了简化电子设备的结构,以减小其厚度,窗口990设置在距发光单元11和光接收单元12的下表面相同的高度处。注意,窗口990是权利要求中列举的透射窗口的示例。
[0159]
为了最小化(或减小)窗口990的开口,有必要最小化(或减小)光接收单元12的镜头顶部和窗口990之间的距离以及发光单元11的扩散板700和窗口990之间的距离。为了最小化(或减小)从发光单元11和光接收单元12到窗口990的距离,期望使发光单元11和光接收单元12的高度相等。
[0160]
此外,为了防止(或减少)发生发光单元11和光接收单元12之间的视角和视差的不一致,发光单元11和光接收单元12理想地位于相同的位置(间隔:零)。另一方面,在发光单元11的照明光的视角(照明场(foi))和光接收单元12的镜头的视角(视野(fov))彼此重叠直到窗口990的位置的情况下,从发光单元11发射的照射光(照明光)在窗口990上反射并进入光接收单元12。
[0161]
因此,期望发光单元11的照明光的角度和光接收单元12的光接收视角直到窗口990的位置不彼此重叠。通过条件表达式来表达这一点,发光单元11和光接收单元12的光学中心之间的距离dr由以下表达式来表达。
[0162]
dr》t/2 wd
×
tan(a/2)
[0163]
wd
×
tan(b/2) d
×
tan(c/2)
[0164]
在此处,t是半导体激光器300的芯片尺寸(一侧),wd是发光单元11和窗口990之间的距离以及光接收单元12和窗口990之间的距离。此外,a是发光单元11的照明光的视角foi(对角线),b是光接收单元12的光接收视角fov(对角线)。此外,c是半导体激光器300的发散角(半峰全宽(fwhm)),d是半导体激光器300和扩散板700之间的间隔。
[0165]
作为典型的示例,距离dr约为5至10mm。此外,尺寸t约为1.0至1.5mm。此外,距离wd约为0.5至2.0mm。此外,视角a约为70至80
°
。此外,视角b约为70至80
°
。此外,角度c约为13至25
°
。此外,间隔d约为0.5至1.5mm。
[0166]
如上所述,根据本技术的实施例,在距离测量模块19的发光单元11中,可以通过经由连接通孔101电连接半导体激光器300和激光驱动器200来减小布线电感。具体而言,通过将半导体激光器300和激光驱动器200之间的布线长度设置为0.5mm或更小,可以将布线电感设置为0.5nh或更小。此外,通过将半导体激光器300和激光器驱动器200之间的重叠量设定为50%或更少,一定数量的热通孔102可以设置在半导体激光器300的正下方,并且可以获得有利的热辐射特性。
[0167]
图18a是示出根据本技术实施例的距离测量模块的俯视图的示例的示图。图18b是示出根据本技术实施例的图18a中的距离测量模块的安装结构的示例的剖视图。如图18a所示,距离测量模块包括发光单元11和光接收单元12。如关于某些先前附图所讨论的,发光单元11包括基板100、激光驱动器200、半导体激光器300、光电二极管400、无源元件500和501、导线1800和通孔1805。示出了四个无源元件500,并且每个都可以包括电容器。还示出了无源元件501,例如,电容器,其可以对应于图2中半导体激光器300上方的未标记的薄矩形。如图所示,激光驱动器200与半导体激光器300的一部分(例如,小于50%)重叠。激光驱动器200还与光电二极管400、无源元件501和两个无源元件500完全重叠。如图18b沿着图18a中的线xviii的剖视图所示,发光单元11和光接收单元12包括与上面关于某些先前附图(例如,图16)描述的元件相同的元件。尽管未明确示出,但是发光单元11沿着图18a中的线xviii'的剖视图看起来与图3中所示的剖视图基本相同,添加了安装在基板100上的无源元件501。在此处,应当理解,线xviii和xviii'可以被认为穿过半导体激光器300、发光单元11和/或光接收单元12的中心。如图18a所示,放置半导体激光器300,以最小化(或减小)光接收元件911和半导体激光器300之间的距离。图18a和图18b所示的距离模块可以具有与图17所示和所述的测量值和/或相对尺寸相同或相似的测量值和/或相对尺寸。
[0168]
《2.应用示例》
[0169]“电子设备”[0170]
图19是示出作为本技术的实施例的应用示例的电子设备800的系统配置示例的示图。
[0171]
电子设备800是配备有根据上述实施例的距离测量模块的移动终端。电子设备800包括成像部分810、距离测量模块820、快门按钮830、电源按钮840、控制器850、存储部分860、无线通信部分870、显示部分880和电池890。
[0172]
成像部分810是捕捉主体图像的图像传感器。距离测量模块820是根据上述实施例的距离测量模块19。
[0173]
快门按钮830是用于从电子设备800的外部给出关于成像部分810中的成像时间的指令的按钮。电源按钮840是用于从电子设备800的外部给出打开/关闭电子设备800的电源的指令的按钮。
[0174]
控制器850是控制整个电子设备800的处理部分。存储部分860是存储电子设备800的操作所需的数据和程序的存储器。无线通信部分870执行与电子设备800外部的无线通信。显示部分880是显示图像等的显示器。电池890是向电子设备800的每个部分供电的电源。
[0175]
利用被视为0
°
的用于控制距离测量模块820的发光控制信号的特定相位(例如,上升时间),成像部分810将从0
°
到180
°
接收的光量检测为q1,并将从180
°
到360
°
接收的光量检测为q2。此外,成像部分810将从90
°
到270
°
接收的光量检测为q3,并将从270
°
到90
°
接收的光量检测为q4。从这些接收到的光的量q1到q4,控制器850根据以下等式计算到物体的距离d,并在显示部分880上显示距离d。
[0176]
d=(c/4πf)
×
arctan{(q3-q4)/(q1-q2)}
[0177]
在上式中,距离d的单位例如是米(m)。c是光速,其单位是例如米每秒(m/s)。反正切是正切函数的反函数。值“(q3-q4)/(q1-q2)”表示照射光和反射光之间的相位差。π表示pi。此外,f是照射光的频率,其单位是例如兆赫(mhz)。
[0178]
图20是示出作为本技术的实施例的应用示例的电子设备800的外部配置示例的示图。
[0179]
电子设备800容纳在外壳801中,并且包括侧表面上的电源按钮840和表面上的显示部分880和快门按钮830。此外,成像部分810和距离测量模块的光学区域设置在后表面上。
[0180]
结果,显示部分880不仅可以显示正常捕捉图像881,还可以显示对应于使用tof的距离测量结果的深度图像882。
[0181]
注意,尽管在该应用示例中,移动终端(例如,智能手机)被示为电子设备800,但是电子设备800不限于此,而是可以是例如数码相机、游戏机、可穿戴装置等。
[0182]
注意,上述实施例示出了体现本技术的示例,并且实施例中的事项和权利要求中的技术指定事项具有对应关系。类似地,权利要求中指定事项的技术和本技术的实施例中被赋予相同名称的事项具有对应关系。然而,本技术不限于该实施例,而是可以在不脱离本技术的主旨的情况下,通过对该实施例应用各种修改来实施。
[0183]
注意,在本说明书中描述的效果仅仅是示例,不限于此,并且可以具有其他效果。
[0184]
本技术可以根据以下内容来配置:
[0185]
(1)一种装置,包括:
[0186]
第一基板;
[0187]
第二基板,所述第二基板在第一基板上;
[0188]
发光装置,所述发光装置包括:
[0189]
光源,所述光源在第二基板上并且向物体发射光;以及
[0190]
驱动器,所述驱动器设置在第二基板中并驱动光源,其中,所述驱动器的一部分在平面图中与光源的第一部分重叠;以及
[0191]
成像装置,所述成像装置在第一基板上邻近发光装置,并且感测从物体反射的光。
[0192]
(2)根据(1)所述的装置,其中,所述发光装置还包括:
[0193]
至少一个第一通孔,所述至少一个第一通孔设置在第二基板中,并且在平面图中与光源的第二部分重叠。
[0194]
(3)根据(1)至(2)中的一项或多项所述的装置,其中,所述至少一个第一通孔延伸穿过第二基板。
[0195]
(4)根据(1)至(3)中的一项或多项所述的装置,其中,所述发光装置还包括:
[0196]
至少一个第二通孔,所述至少一个第二通孔设置在第二基板中,将光源电连接到驱动器。
[0197]
(5)根据(1)至(4)中的一项或多项所述的装置,其中,所述发光装置还包括在第二基板上的至少一个无源元件。
[0198]
(6)根据(1)至(5)中一项或多项所述的装置,还包括:
[0199]
支撑结构,所述支撑结构围绕至少一个无源元件和光源。
[0200]
(7)根据(1)至(6)中一项或多项所述的装置,还包括由支撑结构支撑的光学元件。
[0201]
(8)根据(1)至(7)中的一项或多项所述的装置,其中,所述光学元件漫射从光源发射的光。
[0202]
(9)根据(1)至(8)中的一项或多项所述的装置,其中,所述支撑结构安装到第二基板。
[0203]
(10)根据(1)至(9)中的一项或多项所述的装置,其中,所述驱动器在平面图中与所述至少一个无源元件的一部分重叠。
[0204]
(11)根据(1)至(10)中的一项或多项所述的装置,其中,所述至少一个无源元件包括去耦电容器。
[0205]
(12)根据(1)至(11)中的一项或多项所述的装置,其中,所述光源的第一部分小于所述光源的表面的表面积的50%。
[0206]
(13)根据(1)至(12)中一项或多项所述的装置,其中,所述光源包括激光器。
[0207]
(14)根据(1)至(13)中的一项或多项所述的装置,其中,所述成像装置的覆盖区大于所述发光装置的覆盖区。
[0208]
(15)一种装置,包括:
[0209]
发光装置,所述发光装置包括:
[0210]
光源,所述光源在第一基板上并且向物体发射光;以及
[0211]
驱动器,所述驱动器设置在第一基板中并驱动光源,其中,所述驱动器的一部分在平面图中与小于50%的光源重叠;以及
[0212]
成像装置,所述成像装置感测从物体反射的光。
[0213]
(16)根据(15)所述的装置,还包括:
[0214]
第二基板,其中,所述成像装置和所述第一基板安装在第二基板上。
[0215]
(17)根据(15)至(16)中的一项或多项所述的装置,其中,所述发光装置还包括:
[0216]
至少一个第一通孔,所述至少一个第一通孔设置在第二基板中,并且在平面图中与光源重叠。
[0217]
(18)根据(15)至(17)中的一项或多项所述的装置,其中,所述至少一个第一通孔延伸穿过第一基板。
[0218]
(19)根据(15)至(18)中的一项或多项所述的装置,其中,所述发光装置还包括:
[0219]
至少一个第二通孔,所述至少一个第二通孔设置在第二基板中,将光源电连接到驱动器。
[0220]
(20)一种装置,包括:
[0221]
第一基板;
[0222]
发光装置,所述发光装置包括:
[0223]
光源,所述光源在第一基板上并且向物体发射光;以及
[0224]
驱动器,所述驱动器设置在第二基板中并驱动光源,其中,所述驱动器的一部分在平面图中与光源的第一部分重叠;
[0225]
第二基板;
[0226]
成像装置,所述成像装置在第二基板上,并且感测从物体反射的光;以及
[0227]
连接器,所述连接器将发光装置电连接到成像装置。
[0228]
注意,本技术也可以具有如下配置。
[0229]
(1)一种距离测量装置,包括:
[0230]
基板,在所述基板内置有激光驱动器;
[0231]
半导体激光器,所述半导体激光器安装在基板的一个表面上并发射照射光;
[0232]
连接布线,所述连接布线以0.5nh或更小的布线电感电连接激光器驱动器和半导体激光器;以及
[0233]
光接收单元,所述光接收单元接收从物体到照射光的反射光。
[0234]
(2)根据以上(1)所述的距离测量装置,还包括
[0235]
距离测量操作部分,所述距离测量操作部分基于照射光和反射光测量到物体的距离。
[0236]
(3)根据上述(1)或(2)的距离测量装置,其中,
[0237]
所述光接收单元形成在刚性柔性印刷线路板中的刚性板上,所述刚性板和柔性线路板集成在所述刚性柔性印刷线路板上,并且所述光接收单元经由柔性线路板连接到内置有激光驱动器的基板。
[0238]
(4)根据上述(1)或(2)的距离测量装置,其中,
[0239]
所述内置有激光驱动器的基板和所述光接收单元形成在同一公共基板上。
[0240]
(5)根据以上(4)所述的距离测量装置,其中,
[0241]
所述公共基板是主板或执行到主板的中继的内插器。
[0242]
(6)根据上述(1)或(2)的距离测量装置,其中,
[0243]
所述光接收单元形成在内置有激光驱动器的基板上。
[0244]
(7)根据上述(1)至(6)中任一项所述的距离测量装置,还包括透射窗口,所述透射窗口透射照射光和反射光,其中,
[0245]
来自发光单元的照射光的角度和光接收单元的光接收视角直到透射窗口的位置都不彼此重叠。
[0246]
(8)根据上述(1)至(7)中任一项所述的距离测量装置,其中,
[0247]
所述连接布线的长度为0.5mm或更短。
[0248]
(9)根据上述(1)至(8)中任一项所述的距离测量装置,其中,
[0249]
所述连接布线通过设置在基板上的连接通孔。
[0250]
(10)根据上述(1)至(9)中任一项所述的距离测量装置,其中,
[0251]
所述半导体激光器的一部分被设置成在激光驱动器上方重叠。
[0252]
(11)根据以上(10)所述的距离测量装置,其中,
[0253]
所述半导体激光器的50%或更小面积的一部分被设置成在激光驱动器上方重叠。
[0254]
(12)一种电子设备,包括:
[0255]
基板,在所述基板内置有激光驱动器;
[0256]
半导体激光器,所述半导体激光器安装在基板的一个表面上并发射照射光;
[0257]
连接布线,所述连接布线以0.5nh或更小的布线电感电连接激光器驱动器和半导体激光器;以及
[0258]
光接收单元,所述光接收单元接收从物体到照射光的反射光。
[0259]
(13)一种用于制造距离测量装置的方法,包括:
[0260]
在支撑板的上表面上形成激光驱动器;
[0261]
形成激光驱动器的连接布线并形成内置有激光驱动器的基板;
[0262]
将发射照射光的半导体激光器安装在基板的一个表面上,并且形成连接布线,经由连接布线以0.5nh或更小的布线电感电连接激光器驱动器和半导体激光器;以及
[0263]
形成光接收单元,所述光接收单元接收来自物体的反射光,该光对应于照射光。
[0264]
本领域的技术人员应该理解,根据设计要求和其他因素,可以进行各种修改、组合、子组合和变更,只要在所附权利要求或其等同物的范围内。
[0265]
附图标记列表
[0266]
11 发光单元
[0267]
12 光接收单元
[0268]
13 发光控制器
[0269]
14 距离测量操作部分
[0270]
19 距离测量模块
[0271]
100 基板
[0272]
101 连接通孔
[0273]
110 支撑板
[0274]
120 粘合树脂层
[0275]
130 可剥铜箔
[0276]
131 载体铜箔
[0277]
132 超薄铜箔
[0278]
140 阻焊层
[0279]
150 布线图案
[0280]
161至163 层间绝缘树脂
[0281]
170至172 通孔
[0282]
180 阻焊层
[0283]
200 激光驱动器
[0284]
210 i/o焊盘
[0285]
220 保护绝缘层
[0286]
230 表面保护膜
[0287]
240 粘合层-种子层
[0288]
250 光致抗蚀剂
[0289]
260 铜焊盘-铜布线层(rdl)
[0290]
290 管芯附着膜(daf)
[0291]
300 半导体激光器
[0292]
400 光电二极管
[0293]
500 无源元件
[0294]
600 侧壁
[0295]
700 扩散板
[0296]
800 电子设备
[0297]
801 外壳
[0298]
810 成像部分
[0299]
820 距离测量模块
[0300]
830 快门按钮
[0301]
840 电源按钮
[0302]
850 控制器
[0303]
860 存储部分
[0304]
870 无线通信部分
[0305]
880 显示部分
[0306]
890 电池
[0307]
901 至904基板
[0308]
909 连接器
[0309]
910 光接收元件
[0310]
920 无源元件
[0311]
930 框架元件
[0312]
939、959 粘合剂
[0313]
940 红外截止滤波器
[0314]
950 镜头单元
[0315]
951 镜头
[0316]
990 窗口。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。