技术特征:
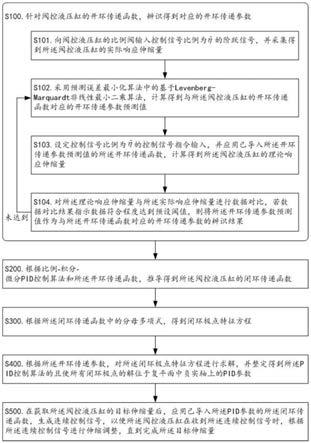
1.一种阀控液压缸控制方法,其特征在于,包括:针对阀控液压缸的开环传递函数g
a
(s),辨识得到对应的开环传递参数,其中,所述阀控液压缸采用比例阀实现控制,所述开环传递函数s表示复数变量,k表示开环增益,ζ表示阻尼比,ω
n
表示无阻尼自然频率,所述开环传递参数包含有所述开环增益k、所述阻尼比ζ和所述无阻尼自然频率ω
n
;根据比例-积分-微分pid控制算法和所述开环传递函数g
a
(s),推导得到所述阀控液压缸的闭环传递函数;根据所述闭环传递函数中的分母多项式,得到闭环极点特征方程d(s)=0,其中,d(s)表示所述分母多项式;根据所述开环传递参数,对所述闭环极点特征方程d(s)=0进行求解,并整定得到所述pid控制算法的且使所有闭环极点的解位于复平面中负实轴上的pid参数,其中,所述pid参数包含有比例增益k
p
和微分时间常数t
d
;在获取所述阀控液压缸的目标伸缩量后,应用已导入所述pid参数的所述闭环传递函数,生成连续控制信号,以便所述阀控液压缸在收到所述连续控制信号时,根据所述连续控制信号进行伸缩调整,直到完成所述目标伸缩量。2.如权利要求1所述的阀控液压缸控制方法,其特征在于,针对阀控液压缸的开环传递函数g
a
(s),辨识得到对应的开环传递参数,包括有如下步骤s101~s104:s101.向阀控液压缸的比例阀输入控制信号比例为的阶跃信号,并采集得到所述阀控液压缸的实际响应伸缩量,其中,表示不超过百分之三十的小数;s102.采用预测误差最小化算法中的基于levenberg-marquardt非线性最小二乘算法,计算得到与所述阀控液压缸的开环传递函数g
a
(s)对应的开环传递参数预测值,其中,所述开环传递函数s表示复数变量,k表示开环增益,ζ表示阻尼比,ω
n
表示无阻尼自然频率,所述开环传递参数预测值包含有与所述开环增益k对应的预测值、与所述阻尼比ζ对应的预测值和与所述无阻尼自然频率ω
n
对应的预测值;s103.设定控制信号比例为的控制信号指令输入,并应用已导入所述开环传递参数预测值的所述开环传递函数g
a
(s),计算得到所述阀控液压缸的理论响应伸缩量;s104.对所述理论响应伸缩量与所述实际响应伸缩量进行数据对比,若数据对比结果指示数据符合程度达到预设阈值,则将所述开环传递参数预测值作为与所述开环传递函数g
a
(s)对应的开环传递参数的辨识结果,否则返回执行步骤s102,其中,所述开环传递参数包含有所述开环增益k、所述阻尼比ζ和所述无阻尼自然频率ω
n
。3.如权利要求1所述的阀控液压缸控制方法,其特征在于,当所述pid控制算法采用基于前馈增益补偿的pid控制算法时,所述pid参数还包含有速度前馈增益k
v
和加速度前馈增益k
a
。4.一种阀控液压缸控制装置,其特征在于,包括有依次通信连接的开环参数辨识模块、闭环函数推导模块、特征方程获取模块、pid参数整定模块和控制信号生成模块;
所述开环参数辨识模块,用于针对阀控液压缸的开环传递函数g
a
(s),辨识得到对应的开环传递参数,其中,所述阀控液压缸采用比例阀实现控制,所述开环传递函数s表示复数变量,k表示开环增益,ζ表示阻尼比,ω
n
表示无阻尼自然频率,所述开环传递参数包含有所述开环增益k、所述阻尼比ζ和所述无阻尼自然频率ω
n
;所述闭环函数推导模块,用于根据比例-积分-微分pid控制算法和所述开环传递函数g
a
(s),推导得到所述阀控液压缸的闭环传递函数;所述特征方程获取模块,用于根据所述闭环传递函数中的分母多项式,得到闭环极点特征方程d(s)=0,其中,d(s)表示所述分母多项式;所述pid参数整定模块,用于根据所述开环传递参数,对所述闭环极点特征方程d(s)=0进行求解,并整定得到所述pid控制算法的且使所有闭环极点的解位于复平面中负实轴上的pid参数,其中,所述pid参数包含有比例增益k
p
和微分时间常数t
d
;所述控制信号生成模块,用于在获取所述阀控液压缸的目标伸缩量后,应用已导入所述pid参数的所述闭环传递函数,生成连续控制信号,以便所述阀控液压缸在收到所述连续控制信号时,根据所述连续控制信号进行伸缩调整,直到完成所述目标伸缩量。5.一种计算机设备,其特征在于,包括有依次通信连接的存储器、处理器和收发器,其中,所述存储器用于存储计算机程序,所述收发器用于收发信息,所述处理器用于读取所述计算机程序,执行如权利要求1~3中任意一项所述的阀控液压缸控制方法。6.一种推土机推土铲自动控制系统,其特征在于,包括有推土机控制盒和阀控液压缸,其中,所述阀控液压缸包括有推土铲倾斜液压缸和/或推土铲抬升液压缸;所述推土机控制盒的输出端通信连接所述阀控液压缸的受控端,用于执行如权利要求1~3中任意一项所述的阀控液压缸控制方法,生成连续控制信号,并将所述连续控制信号传送至所述阀控液压缸,以便所述阀控液压缸根据所述连续控制信号进行伸缩调整,直到完成目标伸缩量。7.如权利要求6所述的推土机推土铲自动控制系统,其特征在于,还包括有全球导航卫星系统gnss收发器、第一惯性测量单元和第二惯性测量单元,其中,所述gnss收发器用于固定安装在推土机的机体顶端,所述第一惯性测量单元用于固定安装在所述推土机的机体上,所述第二惯性测量单元用于固定安装在所述推土机的推土铲上;所述gnss收发器、所述第一惯性测量单元和所述第二惯性测量单元的输出端分别通信连接所述推土机控制盒的输入端;所述推土机控制盒还用于根据施工设计面的三维坐标信息以及实时获取的定位信息、第一姿态信息和第二姿态信息,计算得到所述阀控液压缸的实时目标伸缩量,其中,所述定位信息来自所述gnss收发器且包含有机体顶端安装点的三维坐标以及偏航角,所述第一姿态信息来自所述第一惯性测量单元且包含有所述机体的横滚姿态角以及俯仰姿态角,所述第二姿态信息来自所述第二惯性测量单元且包含有所述推土铲的横滚姿态角以及俯仰姿态角。8.如权利要求7所述的推土机推土铲自动控制系统,其特征在于,根据施工设计面的三维坐标信息以及实时获取的定位信息、第一姿态信息和第二姿态信息,计算得到所述阀控
液压缸的实时目标伸缩量,包括:获取来自所述gnss收发器的定位信息、来自所述第一惯性测量单元的第一姿态信息和来自所述第二惯性测量单元的第二姿态信息,其中,所述定位信息包含有机体顶端安装点的三维坐标以及偏航角,所述第一姿态信息包含有所述机体的横滚姿态角以及俯仰姿态角,所述第二姿态信息包含有所述推土铲的横滚姿态角以及俯仰姿态角;根据所述定位信息、所述第一姿态信息和所述机体顶端安装点与第一顶推梁链接点的相对位置关系,解算出所述第一顶推梁链接点的三维坐标,其中,所述第一顶推梁链接点包括有所述推土机的左侧顶推梁与所述机体的铰接点和右侧顶推梁与所述机体的铰接点;根据所述第一姿态信息和所述第二姿态信息,计算出所述推土铲相对于所述机体的横滚姿态角以及俯仰姿态角;根据所述第一顶推梁链接点的三维坐标、所述推土铲相对于所述机体的横滚姿态角以及俯仰姿态角、顶推梁长度尺寸信息和所述推土铲的铲体尺寸信息以及所述第二姿态信息,推算出所述推土铲的左侧铲刀点及右侧铲刀点的三维坐标;根据施工设计面的三维坐标信息和所述左侧铲刀点及所述右侧铲刀点的当前三维坐标,计算得到倾斜液压缸的倾斜目标伸缩量。9.如权利要求8所述的推土机推土铲自动控制系统,其特征在于,根据施工设计面的三维坐标信息以及实时获取的定位信息、第一姿态信息和第二姿态信息,计算得到所述阀控液压缸的实时目标伸缩量,还包括:在控制所述倾斜液压缸完成所述倾斜目标伸缩量之后,根据所述施工设计面的三维坐标信息、所述第一顶推梁链接点的当前三维坐标和所述左侧铲刀点及所述右侧铲刀点的当前三维坐标,计算得到抬升液压缸的抬升目标伸缩量,其中,所述抬升液压缸包括有所述推土机的左侧抬升液压缸和右侧抬升液压缸。10.一种计算机可读存储介质,其特征在于,所述计算机可读存储介质上存储有指令,当所述指令在计算机上运行时,执行如权利要求1~3中任意一项所述的阀控液压缸控制方法。
技术总结
本发明涉及数字化施工技术领域,公开了一种阀控液压缸控制方法及推土机推土铲自动控制系统,其中的方法通过先根据辨识所得的开环传递参数,对闭环极点特征方程进行求解,并整定得到PID控制算法的且使所有闭环极点的解位于复平面中负实轴上的PID参数,可保证闭环系统的稳定性能,最终在得到目标伸缩量后,可应用已导入所述PID参数的闭环传递函数来生成连续控制信号,以便通过该连续控制信号来使阀控液压缸快准稳地完成所述目标伸缩量,进而在应用到推土机推土铲自动控制系统中时,即使在铲刀位置控制上存在非线性因素,导致控制目标不够清晰分明,也能降低控制参数的整定难度,实现在阀控液压缸控制过程中达成快、准和稳的控制目的。制目的。制目的。
技术研发人员:陈焕斌 林捷满 袁永虎
受保护的技术使用者:北京合众鼎新信息技术有限公司
技术研发日:2022.02.21
技术公布日:2022/5/31
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。