1.本发明涉及一种内窥镜装置,更具体而言,涉及一种构成为能够将内窥镜悬挂于吊架上的内窥镜装置。
背景技术:
2.在内窥镜领域,已知有一种内窥镜装置,其包括构成为能远程操作的治疗工具(机器人治疗工具)。治疗工具由医生在远离内窥镜的主系统中进行控制。插入内窥镜内部的治疗工具根据来自主系统的控制内容而操作。
3.例如,在专利文献1中记载有如下的内窥镜手术系统。
4.(1)在使用能够远程操作的治疗工具的内窥镜中,在其操作部设置接合部。
5.(2)使用能够远程操作的治疗工具的内窥镜手术系统具有可悬挂内窥镜的专用吊架。专用吊架具有相对于所述接合部可拆装的连接器部。接合部经由连接器部可拆装于专用吊架上。
6.(3)手术中将内窥镜经由接合部安装到专用吊架上,手术中操作者就无需持续握住内窥镜,既缓解了操作者的疲劳,又能进行稳定的内窥镜手术。
7.(4)能够远程操作的治疗工具由主从系统控制。
8.但是,在使用治疗工具进行手术时,为了确保内窥镜观察到的视野范围,有时需要对悬挂在专用吊架上的内窥镜操作部旋转、摆动而使用。这样的旋转、摆动会对接合部造成机械负荷,因此,要求设置于内窥镜操作部的接合部具备与各个操作相符的机械强度。
9.另外,在这样的内窥镜手术系统中,在每次手术时都需要将设置于内窥镜操作部的接合部连接到专用吊架再使用,因此,要求设置于内窥镜操作部的接合部具备能够承受这种反复拆装的机械强度。
10.现有技术文献
11.专利文献
12.专利文献1:日本特表2018-509267号公报
技术实现要素:
13.发明所要解决的课题
14.本发明的目的在于提供一种内窥镜装置,其在能够将内窥镜悬挂于吊架上的内窥镜装置中,能够提高拆装于吊架、连接到吊架时各种内窥镜操作所要求的机械强度及耐久性。
15.用于解决课题的技术方案
16.为了解决上述课题,本发明所涉及的内窥镜装置具备:插入部;操作部,其具有构成为可悬挂于吊架上的接合部,经由所述接合部连接到所述吊架;治疗工具管路,其配置于所述接合部及所述操作部的内部,供治疗工具通过;板,其固定于所述操作部上;以及框架,其设置于所述接合部的内部,包括互相连结且沿所述治疗工具管路的配设方向具有长度方
向的多个隔断构件,并且所述框架固定于所述板上。
17.发明效果
18.根据本发明的内窥镜,可以提供如下所述的内窥镜装置:在能够将内窥镜悬挂于吊架上的内窥镜装置中,能够提高拆装于吊架、连接到吊架时各种内窥镜操作所要求的机械强度及耐久性。
附图说明
19.图1是说明发明实施方式所涉及的内窥镜手术系统整体结构的概要图。
20.图2是说明内窥镜100的前端部1011的结构的概要立体图。
21.图3是说明手动操作部102及接合部103的结构细节的立体图。
22.图4是说明手动操作部102及接合部103的结构细节的平面图。
23.图5是说明手动操作部102及接合部103的结构细节的截面图。
24.图6是说明手动操作部102及接合部103的结构细节的截面图。
25.图7是说明框架304的一例结构的立体图。
26.图8是说明框架304的一例结构的平面图。
27.图9是说明框架304的一例结构的正视图。
28.图10是说明框架304的一例结构的截面图。
29.图11是说明板303的一例结构的立体图。
30.图12是说明板303的一例结构的立体图。
31.图13是螺钉s2的安装部分附近的截面图。
32.图14是螺钉s4的安装部分附近的截面图。
具体实施方式
33.下面,参照附图对本实施方式进行说明。在附图中,相同的附图标记表示功能相同的元件。另外,附图示出了根据本公开的原理的实施方式和安装示例,但是这些实施方式是为了理解本公开而不是用于限定地解释本公开。本说明书的描述仅是示例性的,并不旨在以任何方式限制本公开的权利要求或实施例。
34.在本实施方式中,虽然本领域技术人员已充分详细地描述了本公开的实施,但是有必要了解,其他安装、形态也是可以的,在不脱离本公开技术构思的范围和精神的情况下,可以进行构成/结构的改变及各种元件的替换。因此,以下描述不应仅限于此。
35.参照图1,说明发明实施方式所涉及的内窥镜手术系统(内窥镜装置)的整体结构。该内窥镜手术系统大致由内窥镜100和主系统200构成。
36.内窥镜100是将插入部插入受试者的体内拍摄被检部图像的摄像装置,如后所述,构成为能够将各种治疗工具插入内部。治疗工具包括手动治疗工具和机器人治疗工具(机械手)。手动治疗工具是在常规内窥镜中使用的治疗工具(例如,止血或局部注射等常规内窥镜手术时所使用的治疗工具),并且可以从后述治疗工具插入口102f插入。另一方面,机器人治疗工具(机械手)是由后述主系统200的控制器204控制的治疗工具(从机)。可以从后述治疗工具插入口102d或102e插入机器人治疗工具。
37.内窥镜100具备插入部101、手动操作部102、通用线缆105及连接器部106。插入部
101进而具备前端部1011、弯曲部1012以及柔性管部1013。另外,手动操作部102具备接合部103。
38.前端部1011设置于插入部101的端部,其内部具备摄像元件并且具有各种管路的端部。此外,弯曲部1012是构成为能够通过手动操作部102的弯曲调整旋钮102a的操作而主动地弯曲的部分。柔性管部1013是能够因外力而被动地弯曲的部分,与手动操作部102的操作无关。
39.柔性管部1013在其一端与手动操作部102连接。手动操作部102具备例如弯曲调整旋钮102a及操作按钮102b,供操作者进行各种操作以便利用内窥镜100实施观察及拍摄。
40.接合部103构成手动操作部102的一部分,属于连接构件,构成为能够以悬挂于吊架104(后述)的状态进行连接并连接到手动操作部102,以便悬挂内窥镜100。接合部103的结构细节将在后面描述。另外,接合部103及壳体102c中设置有用于插入治疗工具的治疗工具插入口102d~102f。
41.另外,关于接合部103与吊架104之间的连接部的具体结构,可以采用例如日本特表2018-509267号公报中公开的结构。
42.通用线缆105从手动操作部102的相反侧朝向连接器部106延伸。和插入部101一样,通用线缆105在其内部包括光导、各种配线及各种管路。连接器部106包括用于将内窥镜100连接到后述处理器211的各种连接器。
43.作为一例,主系统200具备输入设备202、显示器203及控制器204。作为一例,也可以由不同于握住内窥镜100并操作手动操作部102的内窥镜医生b的医生a来操作主系统200。
44.省略关于控制器204的详细图示,作为一例,由操作杆、按钮、脚踏板等的组合构成,为了对内窥镜100内的机器人治疗工具进行操作、定位等,由医生a进行操作。内窥镜医生b保持内窥镜100并且按照医生a的指示执行手动操作部102的操作以及插入部101的操作,以便将内窥镜100的前端部1011移动到期望的位置。医生a基于由内窥镜100拍摄并显示于显示器203上的图像,操作控制器204,执行机器人治疗工具的操作。
45.内窥镜手术系统具备处理器211、供气供水部212、抽吸部213、电动机箱214、主从系统用处理器215以及显示器216等。
46.处理器211接收来自内窥镜100的图像信号并执行预定的信号处理。处理器211可以在其内部具备发出照射光以照射被摄体的光源。供气供水部212执行控制以排出要供应给被检体的水流或空气流。抽吸部213包括泵和罐(未图示),用于对经由内窥镜100从受试者体内抽吸的体液及切除物进行抽吸。
47.电动机箱214收纳有各种电动机,用于产生驱动力以驱动内窥镜100的机器人治疗工具。根据从主系统200发送的控制信号生成驱动信号,各种电动机基于该驱动信号进行操作。主从系统用处理器215根据来自主系统200的指示,经由电动机箱214执行针对机器人治疗工具的各种控制。显示器216是用于基于例如处理器211中的数据处理结果等进行显示的显示装置。
48.所述处理器211、供气供水部212、抽吸部213、电动机箱214、主从系统用处理器215收纳于机架l中。机架l进而具备吊架104,用于与所述接合部103相连接,悬挂内窥镜100。
49.参照图2,说明内窥镜100的前端部1011的结构。在内窥镜100的前端部1011配置有
配光透镜112a、112b,在插入部101的内部,光导lga、lgb从前端部1011沿连接器部106延伸。来自处理器211内的光源装置的光被该光导lga、lgb引导,通过配置于前端部1011的配光透镜112a、112b朝向被检体照射。
50.另外,如图2所示,内窥镜100在前端部1011具备物镜113和摄像元件117。设于前端部1011的物镜113对来自被检体的散射光或反射光进行聚光,在摄像元件117的受光面上形成被检体的图像。
51.作为一例,摄像元件117可以由ccd(charge coupled device,电荷耦合器)或cmos传感器(complementary metal oxide semiconductor sensor,互补金属氧化物半导体传感器)构成。根据经由电气配线118从处理器211提供的信号(增益控制信号、曝光控制信号、快门速度控制信号等)控制摄像元件117,并且经由电气配线118及a/d转换电路(未图示)将所拍摄图像的图像信号提供给处理器211。
52.此外,在前端部1011的端面设置有供气供水口114、辅助供水口115以及治疗工具口116a~c作为各种管路的端部或开口。供气供水口114连接到供气供水管路121,以便导入用于清洗前端部1011等的水流或空气流。
53.此外,辅助供水口115连接到辅助供水管路122,以便导入用于去除视野范围内的污垢的辅助供水。管路121、122配置为沿前端部1011、弯曲部1012、柔性管部1013、手动操作部102以及通用线缆105的内部延伸。
54.除了这种管路121~122之外,在内窥镜100的内部还设置有治疗工具管路119a~c。治疗工具管路119a~c配置于手动操作部102以及/或者接合部103的内部,确保钳子等治疗工具能进退自如地通过其内部。在前端部1011,治疗工具管路119a~c的前端构成治疗工具口116a~c。另外,治疗工具管路119a~119c中的2个与治疗工具插入口102d及102e连通,剩余的1个与治疗工具插入口102f连通,也作为抽吸管路使用。另外,治疗工具管路119a~c中的至少1个也可以兼做抽吸管路。
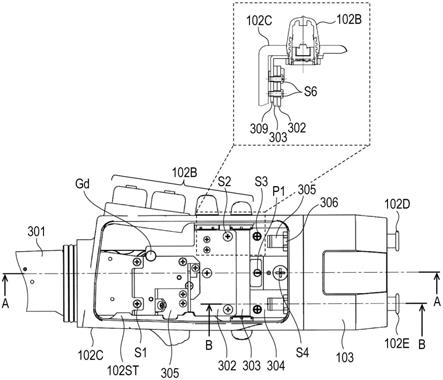
55.参照图3~图6,说明手动操作部102及接合部103的结构细节。图3是手动操作部102及接合部103的立体图,示出了手动操作部102的部分罩体除外的状态。另外,图4是手动操作部102及接合部103的平面图,图5及图6是图4的a-a及b-b截面图。
56.如图3所示,在构成手动操作部102的壳体102c、以及接合部103的内部具备板301~303及框架304。图3仅示出了壳体102c及接合部103的内部结构中的板301~303以及框架304,省略了其他构成要素的图示。
57.板301~303分别具有大致平面的板形状,作为一例,板303可以具有沿治疗工具管路119a~c的配设方向延伸的加强肋结构。此外,如后所述,框架304构成为包括如下所述的隔断构件,即具有互相连结且沿治疗工具管路119a~c的配设方向具有长度方向的多个隔断。
58.如后所述,板301~303通过螺钉等互相连结、固定,框架304也连结到板303,借此,框架304配置于接合部103的内部。另外,板302上还设置有沿与板302的平面大致正交的方向延伸的连接板305。连接板305是用于将通用线缆105连接、固定到手动操作部102的固定构件。
59.如图4所示,板301通过多个螺钉s1固定到板302上。此外,板302通过多个螺钉s2固定到板303上。相对于框架304,板303通过对齐用销p1进行定位,并且通过两个螺钉s3及一
个s4进行固定。然后,通过后述方法将接合部103固定到框架304上。另外,如图4放大所示,板302及303通过从操作按钮102b延伸的l字型固定件309及螺钉s6固定到壳体102c上。
60.如上所述,壳体102c及接合部103被固定到板301~303以及框架304上。板301~303及框架304能以铝或不锈钢为材料而构成。另外,壳体102c中设置有用于抑制板301~303沿垂直于平面的方向移动的止动件102st。
61.图6是图4中的b-b截面图,示出了接合部103连接到框架304及板303的状态。如图6所示,壳体102c在接合部103侧的端部具有突起部ed,按照板303的一端与该突起部ed接触的方式配置板303,借此相对于壳体102c定位板303。另一方面,接合部103安装到固定在板303上的框架304上(利用后述固定环308固定)。
62.参照图7~图10,说明框架304的一例结构。图7是说明框架304的结构的立体图,图8是框架304下表面(底板)的平面图,图9是正视图,图10是截面图。如图9所示,将多个(例如3个)矩形箱型且中空的隔断构件401~403并列排列,构成框架304,所述隔断构件401~403沿着治疗工具管路119a~119c的配设方向(长度方向)具有长度方向。通过具有这种隔断结构,框架304于拉伸方向、旋转方向及相对于摆动被赋予充分的机械强度。
63.位于被隔断构件401及403所夹位置的中央隔断构件402在其上表面具有通孔404。如图8所示,在该通孔404正下方的下表面上设置有所述螺钉s4用螺钉孔408。另外,在该螺钉孔408的前方位置设置有用于插入对齐用销p1的销孔405。
64.为了便于将对齐用销p1插入该销孔405中,将隔断构件402前方侧端面设计成相对于下表面具有预定倾斜的倾斜部409。也就是说,倾斜部409设置在销孔405的附近。此外,如图10所示,在隔断构件402的中空部设置有用于阻断中空部的内部侧面412。该内部侧面412有助于提高隔断构件402的机械强度。
65.此外,如图8及图9所示,左右两侧的隔断构件401及403具备内部侧面411及413。和内部侧面412一样,该内部侧面411及413有助于提高隔断构件401及403的机械强度。
66.除此之外,隔断构件401及403在其内部还具备用于连接治疗工具管路119b及119c的插口306。插口306贯穿内部侧面411及413,并被固定环307固定到框架304的端面,具体为内部侧面411及413。在接合部103的端面利用固定环308固定框架304,从而将接合部103及插口306固定到框架304上。另外,关于隔断构件401~403下表面的厚度,中央隔断构件402下表面422的厚度大于左右隔断构件401及403下表面421、423的厚度(参照图9)。在将接合部103安装到吊架104的状态下,沿旋转方向对手动操作部102施力时,产生最大负荷的位置是螺钉s4的位置。因此,通过使隔断构件402下表面422的厚度更大,可以提高框架304的强度。另外,关于隔断构件402较厚的下表面422所采用的螺钉,最好使用比下表面421、423所采用的螺钉大的螺钉。
67.此外,左右两侧的隔断构件401及403在下表面的端部具备用于插入所述螺钉s3的螺钉孔406及407。另外,尽管螺钉孔406及407的位置任意,但优选配置成与螺钉s4用螺钉孔408构成等腰三角形。此外,在图7所示的结构例中,在左右两侧的隔断构件401及403的上表面,为了便于将螺钉s3螺合到螺钉孔406及407中,在与隔断构件402相比后退的位置处具有端部。但是,和隔断构件402一样,通过在上表面设置与通孔404相同的通孔,也可以将上表面的端部设置于更靠前侧。
68.参照图11及图12,说明板303的一例结构。图11是板303的上表面侧向上的立体图,
图12是下表面侧向上的立体图。如图12所示,板303是具有沿管路长度方向延伸的加强肋l1~l3的加强肋结构。通过该具有加强肋结构的板303以及连结多个隔断构件402的框架304,手动操作部102被赋予较高的机械强度,能够获得较高可靠性。另外,框架304的隔断构件的侧面和加强肋结构一样有助于提高拉伸方向的强度。
69.另外,如图13(图5的符号c附近的放大图)所示,板302在用于固定板303的螺钉s2的螺钉孔中具备位置调整用空间g1。利用该位置调整用空间g1,相对于由对齐用销p1定位的框架304及板303,容易安装板302,不受产品间尺寸偏差的影响。
70.此外,如图14(图5的符号d附近的放大图)所示,在壳体102c的端部设置有突起部ed,板303的一端303s抵接于其内侧面。通过该端部303s抵接于突起部ed以及插入对齐用销p1,板303及框架304被定位到壳体102c。为了提高螺钉s4的安装性,通孔404的端面404s优选形成为与壳体102c的端面102s一致。
71.[其他]
[0072]
本发明并不限于上述实施例,还包括各种变形例。例如,为了易于理解本发明,已经详细描述了上述实施例,但并不限于具有所描述的所有结构的实施例。另外,可以将某一实施例的部分结构替换成其他实施例的结构,并且也可以对某一实施例的结构叠加其他实施例的结构。此外,可以对各实施例的部分结构添加、删除或替换成其他结构。
[0073]
附图标记说明
[0074]
100 内窥镜
[0075]
101 插入部
[0076]
1011 前端部
[0077]
1012 弯曲部
[0078]
1013 柔性管部
[0079]
102 手动操作部
[0080]
102a 弯曲调整旋钮
[0081]
102b 操作按钮
[0082]
102c 壳体
[0083]
103 接合部
[0084]
104 吊架
[0085]
105 通用线缆
[0086]
106 连接器部
[0087]
112a、112b 配光透镜
[0088]
113 物镜
[0089]
114 供气供水口
[0090]
115 辅助供水口
[0091]
116a~c 治疗工具口
[0092]
117 摄像元件
[0093]
118 电气配线
[0094]
119a~c 治疗工具管路
[0095]
200 主系统
[0096]
202 输入设备
[0097]
203 显示器
[0098]
204 控制器
[0099]
211 处理器
[0100]
212 供气供水部
[0101]
213 抽吸部
[0102]
214 电动机箱
[0103]
215 主从系统用处理器
[0104]
216 显示器
[0105]
301~303 板
[0106]
304 框架
[0107]
305 连接板
[0108]
306 插口
[0109]
307、308 固定环。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。