1.本发明涉及一种检测器的检测信号的实时处理方法。
背景技术:
2.在称重物体通过传输皮带的过程中,通过光电检测器检测到的物体的上秤时刻和下秤时刻,从而将物体完全停留在传输皮带上的称重阶段识别出来,再根据该称重阶段的称重数据计算检重重量。
3.光电检测器的信号的准确可靠是检重秤称重准确可靠的先决条件。在称重过程中,光电检测器的检测信号受到电气干扰和机械振动干扰,从而影响光电检测器信号的准确可靠。电气干扰是由于干扰的周期或短期冲击特性,从而导致干扰信号存在周期和冲击干扰特性;机械振动干扰是由于光电检测器的反光板与光发射器之间对准关系,通常光发射器的光线射到反光板外而出现的信号被遮挡情况,从而形成干扰信号。
4.通常采用滤波方法实现光电检测器信号抗干扰处理数据处理,但这些滤波方法的延迟特性会导致被处理信号在时域上出现定位延迟,并且这些延迟受干扰信号宽度和频率等因素影响,这些延迟的大小会不断变化,从而导致根据光电检测信号获得的定位信号出现位置偏差,进而导致识别的称重数据出现位置偏差,因此降低检重秤称重性能。
技术实现要素:
5.本发明的目的是针对上述不足,本发明提供一种检测信号处理方法,可以同时分析处理不同种类的干扰信号,避免了滤波对信号的延迟影响,提高检重秤称重数据识别精度,提高检重秤性能。
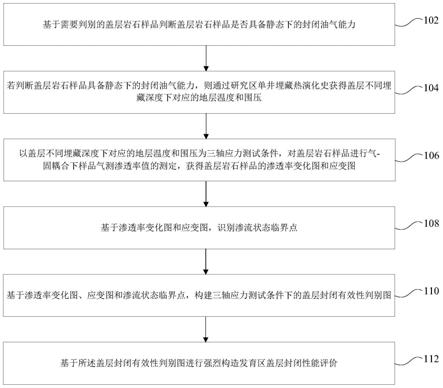
6.本发明提出一种检测信号的实时处理方法,在检测信号从高电平转为低电平、或低电平转为高电平时分别进行信号处理,包括:记录检测信号的电平转换的时刻点为起始点,实时获取当前时刻点的检测信号的状态,并比较当前的时间宽度与预设的干扰信号的最大间隔宽度,判断并记录从起始点到当前的时刻点的信号电平。
7.进一步的,上述干扰信号包括遮挡干扰信号或应用干扰信号。
8.本发明根据信号转换的类型,结合不同干扰信号的特点,对不同的干扰信号采取不同的分析方法,并有针对性的剔除这些干扰信号,从而提高了称重信号的识别精度,提高了检重秤的性能。
9.当检测信号从低电平转为高电平时,记录电平转换的时刻点为起始点,实时获取当前时刻点的检测信号的电平状态,并比较当前的高电平信号宽度和遮挡干扰信号的最大间隔宽度,若判断为有遮挡,则将高电平变为低电平;若判断为无遮挡,检测信号为高电平。
10.若无法判断有无遮挡或有无间隔,则不对信号做任何处理。
11.当检测信号从低电平转为高电平时,记录电平转换的时刻点为起始点,实时检测当前时刻点的检测信号的电平状态,并比较当前的低电平信号宽度和应用干扰信号的最大间隔宽度,若判断有间隔,则将低电平变为高电平;若判断为无间隔,检测信号为低电平。
12.进一步的,实时检测包括等时间间隔、或不定时间间隔检测。
13.据信号电平的变换,分别采用对应的分析方法、以及与预设的干扰信号的最大间隔宽度进行分析判断,提高了分析准确性和精度;同时,通过实时检测,加快了分析判断的进度。
14.本发明还提出一种检测器,包括检测开关和信号处理器,其中检测开关用于获得初始信号,信号处理器应用如上所述的检测信号的实时处理方法对初始信号进行处理。
15.本发明还提出一种存储介质,包括存储的程序,其中,在程序运行时控制所述存储介质所在装置执行上述的检测信号的实时处理方法。
16.综上所述,本发明提供一种依据不同干扰信号的特点、采用针对性的边沿定位并且宽度识别的方法进行抗干扰处理,从而避免了滤波对信号的延迟影响,进而提高检重秤称重数据识别精度,提高检重秤性能。同时,通过实时检测,加快了分析判断的进度。
附图说明
17.包括附图是为提供对本发明进一步的理解,它们被收录并构成本技术的一部分,附图示出了本发明的实施例,并与本说明书一起起到解释本发明原理的作用。附图中:
18.图1示出了检测器的输出信号示意图。
19.图2示出了检测信号的实时处理方法的流程图一。
20.图3示出了检测信号的实时处理方法的流程图二。
具体实施方式
21.为了使本领域的人员更好地理解本发明实施例中的技术方案,下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅是本发明实施例一部分实施例,而不是全部的实施例。基于本发明实施例中的实施例,本领域普通技术人员所获得的所有其他实施例,都应当属于本发明实施例保护的范围。
22.图1示出了检测器的输出信号示意图。图2示出了检测信号的实时处理方法的流程图一。图3示出了检测信号的实时处理方法的流程图二。
23.如图1所示,信号1为理想情况下的检测信号,尚未有称重物体时,检测器未检测到称重物体,则输出信号为低电平101;当检测器检测到称重物体时,输出信号为高电平102。
24.而实际情况下,如信号2,当称重物体或检测器抖动时,例如检测信号会落在检测屏的外部,也会输出高电平,即为毛刺信号103。毛刺信号103是由于称重物体或检测器抖动时产生的,是遮挡干扰信号,把遮挡干扰信号的最大时间宽度设置为最大间隔宽度为bw。基于检测器的振动频率和幅度,毛刺信号一般时长不超过50ms。
25.又如信号3,当称重物体是不规则形状时,比如双驼峰形状,则检测信号是断开的,如信号102被应用干扰信号分为信号1021和1022,应用干扰信号的最大时间宽度为最大间隔宽度为aw。
26.利用图2的检测信号处理方法,根据步骤1,对信号2记录由低电平变为高电平的时刻点sp。
27.根据步骤2,从sp位置开始从0计时,定时检测从sp位置到当前位置的时间宽度sw,例如,设置每隔2ms检测一次,则高电平信号的时间宽度sw依次为2ms、4ms、6ms,依此类推。
28.根据步骤3,进入高电平状态下的信号分析。检测当前的sw时刻点的信号状态,并比较当前的高电平信号宽度sw和遮挡干扰信号的最大间隔宽度bw,并判断是否进入步骤4。
29.若当前的高电平信号的时间宽度sw为2ms,其小于遮挡干扰信号的最大间隔宽度bw 50ms,且信号未变成低电平,此时无法判断是否有遮挡,则不对信号做任何处理。
30.重复上述步骤,当高电平信号的时间宽度sw为52ms,大于遮挡干扰信号的最大间隔宽度bw 50ms,且信号未变成低电平,仍然记录sp位置到此时的状态为未遮挡,并记录从sp位置到此时的信号为高电平。
31.直到出现下列任一情形时,进入步骤4的低电平状态下的信号分析,如图3所示。情形一:当高电平信号宽度sw为30ms,小于遮挡干扰信号的最大间隔宽度bw 50ms,但若此时信号变成低电平,则sp位置到此时的状态为有遮挡,并记录从sp位置到此时的信号为低电平。情形二:当高电平信号宽度sw为60ms,大于遮挡干扰信号的最大间隔宽度bw 50ms,若此时信号变为低电平,则记录从sp位置到此时的状态为未遮挡,并记录从sp位置到此时的信号为低电平。对于情形一或情形二,都记录信号变为低电平的时刻点nsp,接着进入步骤4的低电平状态下的信号分析。
32.根据步骤4,进入低电平状态下的信号分析。设置应用干扰信号的最大间隔宽度aw,例如30ms。
33.接着进入步骤5,从nsp位置开始从0计时,定时检测从nsp位置到当前位置的时间宽度nsw,例如,设置每隔3ms检测一次,则低电平信号的时间宽度nsw依次为3ms、6ms、9ms,依此类推。
34.接着,进入步骤6,分析判断不同的时间宽度nsw时的信号。检测当前的nsw时刻点的信号状态,并比较当前的低电平信号宽度nsw和应用干扰信号的最大间隔宽度aw,并判断是否进入步骤3。
35.若当前的低电平信号宽度nsw为3ms,其小于应用干扰信号的最大间隔宽度aw 30ms,且信号未变成高电平,此时无法判断是否有间隔,则不对信号做任何处理。
36.重复上述步骤,当低电平信号宽度nsw为33ms,大于应用干扰信号的最大间隔宽度aw 30ms,且信号未变成高电平,仍然记录nsp位置到此时的状态为未间隔,并记录从nsp位置到此时的信号为低电平。
37.直到出现下列任一情形时,进入步骤3的高电平状态下的信号分析。情形三:当低电平信号宽度nsw为15ms,小于应用干扰信号的最大间隔宽度aw 30ms,且信号已变成高电平,则nsp位置到此时的状态为有间隔,并记录从nsp位置到此时的信号为高电平。情形四:当低电平信号宽度nsw为33ms,大于应用干扰信号的最大间隔宽度aw 30ms,且信号已变成高电平,记录从nsp位置到此时的状态为未间隔,并记录从nsp位置到此时的信号为高电平。对于情形三或情形四,记录信号变为高电平的时刻点为sp,并进入步骤3的高电平状态下的信号分析。
38.本发明中,采用的检测、分析判断都是在实时状态下进行的,因此,在使用中,可以同时进行称重和分析,而不是先称重、再对检测信号进行分析判断,不仅节省了时间,还可以避免使用滤波器导致的时间上的延迟效应。
39.上述实施例中,设定检测器未检测到称重物体时输出信号为低电平,检测器检测到称重物体时输出信号为高电平,反之,若设定检测器未检测到称重物体时输出信号为高
电平,检测器检测到称重物体时输出信号为低电平,则先执行步骤4至6,进行低电平状态下的信号分析,当未检测到称重物体时进行步骤1至3的高电平状态下的信号分析。
40.通过上述分析,获得检测器检测到的物体的上秤时刻和下秤时刻,从而将物体完全停留在传输皮带上的称重阶段识别出来,再根据该称重阶段的称重数据计算检重重量。
41.本发明还提出一种检测器,包括检测开关和信号处理器,其中检测开关用于获得初始信号,信号处理器应用如上所述的检测信号的实时处理方法对初始信号进行处理。
42.本发明根据信号转换的类型,结合不同干扰信号的特点,对不同的干扰信号采取不同的分析方法、以及与预设的干扰信号的最大间隔宽度进行分析判断,提高了分析准确性和精度并有针对性的剔除这些干扰信号,提高了信号处理的识别精度,提高了检重秤的性能。此外,考虑到同一个信号中,会同时存在不同的干扰信号多次重复出现,上述分析方法也可以多次重复使用。
43.通过以上对检测信号的实时处理方法的描述可知,本领域的技术人员可以清楚地了解到本发明可借助软件以及必要的硬件平台的方式来实现,基于这样的理解,本发明的技术方案本质上或者说对于现有技术做出贡献的部分可以以软件产品的方式体现出来,该计算机软件产品可以存储在存储介质中,包括但不限于rom/ram(只读存储器/随机存储存储器)、磁碟、光盘等,包括若干指令用以使得一台或多台计算机设备(可以是个人计算机、服务器、或者网络设备等)执行本发明的各个实施例或者实施例中某些部分所述的方法。
44.本发明的检测信号的实时处理方法可以在由计算机执行的计算机可执行指令的一般上下文中描述,例如程序模块。一般地,程序模块包括执行特定任务或实现特定抽象数据类型的程序、对象、组件、数据结构等等。也可以在分布式计算环境中实践本发明,在这些分布式计算环境中,由通过通信网络而被连接的远程处理设备来执行任务。在分布式计算环境中,程序模块可以位于包括存储设备在内的本地和远程计算机存储介质中。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。