一种svd求逆分裂布雷格曼的扫描雷达前视成像方法
技术领域
1.本发明属于雷达成像技术领域,涉及一种适用于前视扫描雷达快速成像的方位角高分辨方法,可用于前视扫描雷达成像算法中的方位向聚焦快速处理。
背景技术:
2.雷达前视区域高分辨成像是实现对地搜索、自主导航、环境勘测等的重要技术,传统的单站合成孔径雷达和多普勒波束锐化等技术须利用多普勒信息实现方位向聚焦,但在前视区域,雷达平台航迹与天线的波束指向重合使得多普勒带宽为零,无法实现方位向聚焦,形成前视盲区。
3.扫描雷达是一种常用的雷达工作模式,通过天线扫描的方式先后照射成像区域,获得目标散射系数信息,不依赖多普勒频率,因此可以适用于前视区域的成像。实现扫描雷达前视区域高分辨成像要求图像在距离向和方位向同时具有相匹配的高分辨率,通过发射大时宽带宽积的线性调频信号,然后对距离向进行距离脉冲压缩可实现距离向高分辨,方位向分辨率依赖于天线的孔径宽度,由于天线孔径宽度受平台限制导致无法满足实际工程中方位向高分辨率的需求,目前扫描雷达提高方位向分辨率方法主要有解卷积前视成像算法和单脉冲前视成像算法。
4.申请公布号为cn105607055a,名称为“一种基于天线方向图的机载雷达单脉冲前视成像方法”的专利申请,公开了一种基于天线方向图的机载雷达单脉冲前视成像方法,该方法补偿了实际天线与理想天线相位误差角,再综合和、差单脉冲实现对回波方位角的测量,测角精度高,能够对单目标实现方位向高分辨率,但是该方法是建立在单脉冲测角的基础上,受限于多数散射中心合成的角闪烁效应影响,不能区分在同一距离分辨单元或同一波束内的多个目标,导致对多目标的分辨率差。
5.申请公布号为cn108333587a,名称为“基于分裂bregman的前视扫描雷达超分辨成像方法”的专利申请,公开了一种基于分裂布雷格曼解卷积前视成像算法,该方法将前视扫描雷达方位向角超分辨问题转化为数学中的l1正则化问题的求解,根据分bregman算法进行变量分离,再通过交叉迭代,提高方位向分辨率,能够实现同一波束覆盖范围内多个目标的区分,但是该方法每次迭代都涉及复杂的矩阵求逆运算,单次迭代的运算量较大,不利于快速成像。
技术实现要素:
6.本发明的目的在于克服上述技术中存在的不足,提出了一种svd求逆分裂布雷格曼的扫描雷达前视成像方法,在保证方位向成像分辨率的情况下,用于解决现有技术中涉及复杂矩阵求逆导致前视扫描雷达成像效率较低的技术问题。
7.为实现上述目的,本发明的技术方案包括如下步骤:
8.(1)对回波矩阵进行预处理:
9.(1a)扫描雷达获取线性调频信号的回波矩阵s:
10.对扫描雷达天线方向图的幅度调制信号进行l点采样,得到长度为l的采样值向量距离单元数为n的扫描雷达获取其向前视成像区域发射m个脉冲的线性调频信号,经过每个距离单元分布的(m l-1)个目标点反射的由采样值向量幅度加权的维数为n
×
m的回波矩阵s,其中,n≥2,m≥2,l≥2;
11.(1b)对回波矩阵s进行预处理:
12.对回波矩阵s进行距离向脉冲压缩,并对距离向脉冲压缩后的回波矩阵进行距离向徙动校正,得到距离向徙动校正后的回波矩阵y,y=[y1,y2,
…yn
,
…
,yn]
t
,其中,yn为长度为m的第n个距离单元的方位向回波向量,[
·
]
t
为转置操作;
[0013]
(2)构建类卷积测量矩阵a,以及每个距离单元的目标散射幅度向量xn和噪声幅度向量gn:
[0014]
由采样值向量构造维数为m
×
(m l-1)类卷积测量矩阵a,由方位向回波向量yn中(m l-1)个目标点的散射幅度构建每个距离单元的长度为(m l-1)目标散射幅度向量xn,由方位向回波向量yn中包含噪声的幅度构建每个距离单元的长度为(m l-1)的噪声幅度向量gn;
[0015]
(3)建立每个距离单元前视高分辨成像类卷积模型χn:
[0016]
通过每个距离单元的目标散射幅度向量xn,以及方位向回波向量yn和噪声幅度向量gn,利用矩阵向量运算建立每个距离单元前视高分辨成像类卷积模型χn:
[0017]yn
=axn gn;
[0018]
(4)将前视高分辨成像问题转换为无约束凸优化问题:
[0019]
(4a)将求解目标散射幅度向量xn的问题作为前视高分辨成像问题:
[0020]
在噪声幅度向量gn服从高斯分布的特性前提下,将求解每个距离单元前视高分辨成像类卷积模型χn中目标散射幅度向量xn的问题作为前视高分辨成像问题;
[0021]
(4b)将不等式约束凸优化问题转化为等式约束凸优化问题:
[0022]
通过前视高分辨成像问题中噪声幅度向量gn的能量二范数以及目标散射幅度向量xn的误差值一范数||xn||1,将前视高分辨成像问题转化为不等式约束凸优化问题,通过每个距离单元的噪声均衡的正则化参数ξn,将不等式约束凸优化问题转化为等式约束凸优化问题;
[0023]
(4c)将等式约束凸优化问题转化为无约束凸优化问题:
[0024]
通过惩罚系数η,将等式约束凸优化问题转化为无约束凸优化问题,无约束凸优化问题为:
[0025][0026]
其中:为目标散射幅度向量xn的二范数项,||
·
||2为二范数,||
·
||1为一范数,wn为长度为m的第n个距离单元的第一隐藏变量向量;
[0027]
(5)获取托普利茨矩阵(ξn[a]
t
a ηi):
[0028]
求无约束凸优化问题中的目标散射幅度向量xn的二范数项
对目标散射幅度向量xn的导数,提取导数{(ξn[a]
t
a ηi)x
n-ξ
natyn-ηwn}中的目标散射幅度向量xn的一次项,得到维数为(m l-1)
×
(m l-1)的托普利茨矩阵(ξn[a]
t
a ηi),其中,i为维数(m l-1)
×
(m l-1)的单位矩阵;
[0029]
(6)对类卷积测量矩阵a进行奇异值分解,以获取托普利茨矩阵(ξn[a]
t
a ηi)的逆矩阵:
[0030]
(6a)将类卷积测量矩阵a进行奇异值分解svd,得到维数为m
×
m的左酉矩阵u,以及维数为(m l-1)
×
(m l-1)的右酉矩阵v以及长度为(m l-1)的奇异值向量σ,其中,σ=[σ1,σ2,
…
,σu…
,σ
p
,0,0
…
0]
t
且σ1≥σ2≥
…
σu≥
…
≥σ
p
,σu为矩阵a的第u个非零的奇异值,p为类卷积测量矩阵a的非零奇异值个数,p≥l;
[0031]
(6b)将通过奇异值向量σ、左酉矩阵u、右酉矩阵v和v的转置矩阵[v]
t
表示的类卷积测量矩阵a、a的转置矩阵[a]
t
和单位矩阵i带入托普利茨矩阵(ξn[a]
t
a ηi)中,得到(ξn[a]
t
a ηi)的逆矩阵vdiag(1/(ξnσ2 ηi1))[v]
t
,其中:
[0032]
a=udiag(σ)v
t
[0033]at
=vdiag(σ)u
t
[0034]
i=vdiag(i1)v
t
[0035]
其中:diag(
·
)为将向量对角化为对角矩阵的操作,i1=[1,1,
…
,1]
t
为长度为(m l-1)的向量;
[0036]
(7)采用裂布雷格曼bregman求解无约束凸优化问题,以获取扫描雷达前视高分辨图像:
[0037]
(7a)令距离单元n=1;
[0038]
(7b)初始化迭代次数为k,最大迭代次数为k,k≥48,迭代终止阈值ε,ε》0,惩罚系数η=0.01,初始化k=0时第一隐藏变量向量的值,第二隐藏变量向量的值以及目标散射幅度向量xn的值均为i0,并令k=1,其中,i0=[0,0,
…
,0]
t
为长度为(m l-1)的向量;
[0039]
(7c)更新目标散射幅度向量计算公式并计算其值:
[0040]
通过长度为m的第n个距离单元的第二隐藏变量向量zn,得到在分裂bregman迭代策略条件下的无约束凸优化问题,根据分裂bregman算法对在分裂bregman迭代策略条件下的无约束凸优化问题求解时获得的目标散射幅度向量计算公式,将矩阵vdiag(1/(ξσ2 ηi1))[v]
t
带入目标散射幅度向量计算公式中,得到更新后的目标散射幅度向量的计算公式:
[0041][0042]
(7d)估计噪声均衡的正则化参数和计算第一隐藏变量向量与第二隐藏变量向量的值:
[0043]
根据更新后的目标散射幅度向量第一隐藏变量向量以及第二隐藏变量向量利用曲线参数估计法估计噪声均衡的正则化参数根据分裂bregman算法对的
无约束凸优化问题求解时获得的第一隐藏变量向量和第二隐藏变量向量的计算公式,计算第一隐藏变量向量和第二隐藏变量向量的值;
[0044]
(7e)判断k》k且是否成立,若是,得到第n个距离单元的目标散射幅度向量值执行步骤(7f),否则令k=k 1,执行步骤(7c);
[0045]
(7f)判断n》n是否成立,若是,将n个距离单元的目标散射幅度向量拼接得到维数为n
×
(m l-1)前视成像区域目标散射幅度矩阵即扫描雷达前视高分辨图像,否则,令n=n 1,并执行步骤(7b)。
[0046]
本发明与现有技术相比,具有如下优点:
[0047]
本发明在采用分裂bregman算法对无约束凸优化问题进行求解的时候,利用类卷积测量矩阵a的奇异值分解,将托普利茨矩阵(ξn[a]
t
a ηi)求逆转化为酉矩阵与对角矩阵乘积的形式,避免了传统的分裂bregman算法对无约束凸优化问题求解时伴随着复杂的托普利茨矩阵(ξn[a]
t
a ηi)求逆导致前视扫描雷达成像效率低的问题;同时,在设置噪声均衡的正则化参数时,利用曲线参数估计法估计每个距离单元的噪声均衡的正则化参数避免了手动调整正则化参数导致噪声抑制能力不强引起前视扫描雷达成像质量差的问题,从而在保证方位向高分辨的情况下,提高了前视扫描雷达成像的效率,有助于前视扫描雷达高分辨的快速成像。
附图说明
[0048]
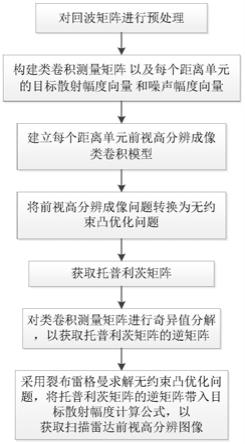
图1是本发明的实现流程图;
[0049]
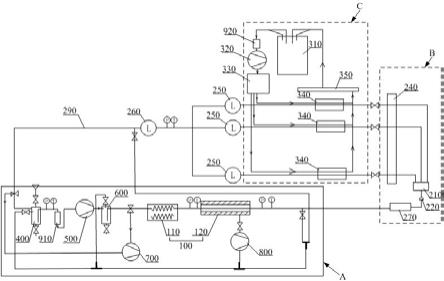
图2是本发明中前视扫描雷达成像结构图;
[0050]
图3是本发明与现有技术点目标仿真方位向分辨对比图。
具体实施方式
[0051]
下面结合附图和具体实施例,对本发明作进一步详细描述。
[0052]
参照图1,一种svd求逆分裂布雷格曼的扫描雷达前视成像方法,包括如下步骤:
[0053]
步骤1)对回波矩阵s进行预处理:
[0054]
步骤1a)扫描雷达获取线性调频信号的回波矩阵s:
[0055]
前视扫描雷达成像结构图如图2所示,假设以扫描雷达平台垂直与地面的交点为原点建立笛卡尔坐标系xoyz,扫描雷达平台以沿着y轴的方向做速度为v的匀速直线运动,平台的飞行高度为h,ω为扫描雷达天线扫描角速度,θ0为扫描雷达初始时刻空间方位角,r0为扫描雷达距在初始时刻的斜距历程,扫描雷达对正前面区域进行扫描观测,对扫描雷达天线方向图的幅度调制信号进行l点采样,得到长度为l的采样值向量距离单元数为n的扫描雷达获取其向前视成像区域发射m个脉冲的线性调频信号,经过每个距离单元分布的(m l-1)个目标点反射的由采样值向量幅度加权的维数为n
×
m的回波矩阵s,其中,n≥2,m≥2,l≥2,a
l
为幅度调制信号的第l个采样值,本实施例中n设置为
1024,m设置为512,l设置为64;
[0056]
(1b)对回波矩阵s进行预处理:
[0057]
为了实现目标的距离向聚焦,而且考虑到运动扫描雷达平台下的目标回波存在超越距离单元的徙动,对回波矩阵s进行距离向脉冲压缩,并对距离向脉冲压缩后的回波矩阵进行距离向徙动校正,使得目标能量更好的在距离向聚集起来,得到距离向徙动校正后的回波矩阵y,y=[y1,y2,
…yn
,
…
,yn]
t
,yn为长度为m的第n个距离单元的方位向回波向量,其中第n个距离单元的第m个脉冲的距离向徙动校正后的回波为y
n,m
:
[0058][0059][0060]
其中,[
·
]
t
为转置操作,r
n,m,q
为扫描雷达距在第n个距离单元的第m个脉冲与第q个目标点的瞬时斜距历程,θ
n,m
为扫描雷达在第n个距离单元的第m个脉冲的瞬时空间方位角,exp(
·
)表示以自然常数为底的指数操作,j表示虚数单位,为扫描雷达在第n个距离单元的第m个脉冲的瞬时俯仰角,为幅度调制信号的第个采样值,个采样值,为向下取整操作,sinc(
·
)为辛格函数,b为发射信号的带宽,c为光速,λ为发射信号波长,x(r
n,m,q
,θ
n,m
)为前视成像区域第n个距离单元的第m个脉冲的第q个目标点的散射幅度值,g(r
n,m,q
,θ
n,m
)为第n个距离单元的第m个脉冲的第q个目标点的回波信号中噪声幅度值;
[0061]
步骤2)构建类卷积测量矩阵a,以及每个距离单元的目标散射幅度向量xn和噪声幅度向量gn:
[0062]
由采样值向量构造维数为m
×
(m l-1)类卷积测量矩阵a,由方位向回波向量yn中(m l-1)个目标点的散射幅度构建每个距离单元的长度为(m l-1)目标散射幅度向量xn,由方位向回波向量yn中包含噪声的幅度构建每个距离单元的长度为(m l-1)的噪声幅度向量gn;
[0063]
步骤3)建立每个距离单元前视高分辨成像类卷积模型χn:
[0064]
对于每个距离单元,扫描雷达的方位向回波yn可以视为采样值向量与目标散射幅度向量xn的卷积,因为两个向量卷积可以利用矩阵与向量的乘积运算实现,所以通过每个距离单元的目标散射幅度向量xn,方位向回波向量yn和噪声幅度向量gn以及类卷积测量矩阵a,利用矩阵向量运算建立每个距离单元前视高分辨成像类卷积模型χn:
[0065]yn
=axn gn;
[0066]
步骤4)将前视高分辨成像问题转换为无约束凸优化问题:
[0067]
步骤4a)将求解目标散射幅度向量xn的问题作为前视高分辨成像问题:
[0068]
由于类卷积观测矩阵a为低秩矩阵,所以无法直接通过前视高分辨成像类卷积模
型χn求解目标散射幅度向量xn,所以要引入前视高分辨成像类卷积模型χn其它的先验信息,利用在噪声幅度向量gn服从高斯分布的特性前提下,将求解每个距离单元前视高分辨成像类卷积模型χn中目标散射幅度向量xn的问题作为前视高分辨成像问题;
[0069]
(4b)将不等式约束凸优化问题转化为等式约束凸优化问题:
[0070]
要准确求解前视高分辨成像类卷积模型χn中目标散射幅度向量xn,需要将噪声的能量控制最小而且要将求解目标散射幅度向量xn的误差控制最小,通过前视高分辨成像问题中噪声幅度向量gn的能量二范数以及目标散射幅度向量xn的误差值一范数||xn||1,将前视高分辨成像问题转化为不等式约束凸优化问题,通过每个距离单元的噪声均衡的正则化参数ξn,将不等式约束凸优化问题转化为等式约束凸优化问题,下面为不等式约束凸优化问题和等式约束凸优化问题:
[0071]
不等式约束凸优化问题为:
[0072][0073][0074]
等式约束凸优化问题为:
[0075][0076]
subject to:wn=xn[0077]
其中:ε1为噪声能量最小容限,wn为长度为m的第n个距离单元的第一隐藏变量向量;
[0078]
(4c)将等式约束凸优化问题转化为无约束凸优化问题:
[0079]
通过惩罚系数η,将等式约束凸优化问题转化为无约束凸优化问题,无约束凸优化问题为:
[0080][0081]
其中:为目标散射幅度向量xn的二范数项,||
·
||2为二范数,||
·
||1为一范数;
[0082]
步骤5)获取托普利茨矩阵(ξn[a]
t
a ηi):
[0083]
由于在求解无约束凸优化问题时,存在复杂托普利茨矩阵的求逆,所以在进行迭代求解前,先获取复杂托普利茨的矩阵并且根据托普利茨矩阵求取其逆矩阵,能够避免在迭代过程中进行反复的复杂矩阵求逆导致成像效率低的问题,所以求无约束凸优化问题中的目标散射幅度向量xn的二范数项对目标散射幅度向量xn的导数,提取导数{(ξn[a]
t
a ηi)x
n-ξ
natyn-ηwn}中的目标散射幅度向量xn的一次项,这时得到了现有技术中需要求逆的复杂矩阵,得到维数为(m l-1)
×
(m l-1)的托普利茨矩阵(ξn[a]
t
a ηi),其中,i为维数(m l-1)
×
(m l-1)的单位矩阵;
[0084]
步骤6)对类卷积测量矩阵a进行奇异值分解,以获取托普利茨矩阵(ξn[a]
t
a ηi)的
逆矩阵:
[0085]
步骤6a)因为每次迭代过程中噪声均衡的正则化参数都在更新,直接将托普利茨矩阵(ξn[a]
t
a ηi)的奇异值分解求其逆矩阵会导致运算效率降低,通过将类卷积测量矩阵a进行奇异值分解svd,得到维数为m
×
m的左酉矩阵u,以及维数为(m l-1)
×
(m l-1)的右酉矩阵v以及长度为(m l-1)的奇异值向量σ,其中,σ=[σ1,σ2,
…
,σu…
,σ
p
,0,0
…
0]
t
且σ1≥σ2≥
…
σu≥
…
≥σ
p
,σu为矩阵a的第u个非零的奇异值,p为类卷积测量矩阵a的非零奇异值个数,p≥l;
[0086]
步骤6b)通过托普利茨矩阵的逆矩阵形式推导出来,对于噪声均衡的正则化参数更新也无需反复的对类卷积观测矩阵进行求逆,只需将更新后的噪声均衡的正则化参数带入即可,可以避免复杂矩阵奇异值分解反复迭代求逆从而提高运算效率,将通过奇异值向量σ、左酉矩阵u、右酉矩阵v和v的转置矩阵[v]
t
表示的类卷积测量矩阵a、a的转置矩阵[a]
t
和单位矩阵i带入托普利茨矩阵(ξn[a]
t
a ηi)中,得到(ξn[a]
t
a ηi)的逆矩阵vdiag(1/(ξnσ2 ηi1))[v]
t
,其中:
[0087]
a=udiag(σ)v
t
[0088]at
=vdiag(σ)u
t
[0089]
i=vdiag(i1)v
t
[0090]
其中:diag(
·
)为将向量对角化为对角矩阵的操作,i1=[1,1,
…
,1]
t
为长度为(m l-1)的向量;
[0091]
步骤7)采用裂布雷格曼bregman求解无约束凸优化问题,以获取扫描雷达前视高分辨图像:
[0092]
步骤7a)令距离单元n=1;
[0093]
步骤7b)初始化迭代次数为k,最大迭代次数为k,k≥48,迭代终止阈值ε,ε》0,惩罚系数η=0.01,初始化k=0时第一隐藏变量向量的值,第二隐藏变量向量的值以及目标散射幅度向量xn的值均为i0,并令k=1,其中,i0=[0,0,
…
,0]
t
为长度为(m l-1)的向量;
[0094]
步骤7c)更新目标散射幅度向量计算公式并计算其值:
[0095]
通过长度为m的第n个距离单元的第二隐藏变量向量zn,得到在分裂bregman迭代策略条件下的无约束凸优化问题,根据分裂bregman算法对在分裂bregman迭代策略条件下的无约束凸优化问题求解时获得的目标散射幅度向量计算公式:将矩阵vdiag(1/(ξσ2 ηi1))[v]
t
带入目标散射幅度向量计算公式中,得到更新后的目标散射幅度向量的计算公式:
[0096][0097]
其中:(
·
)-1
为求逆操作;
[0098]
步骤7d)估计噪声均衡的正则化参数和计算第一隐藏变量向量与第二隐藏变量向量的值:
[0099]
根据更新后的目标散射幅度向量第一隐藏变量向量以及第二隐藏变量向量利用曲线参数估计法估计噪声均衡的正则化参数将更新后的目标散射幅度向量带入到点中,得到由表示的点,将噪声均衡的正则化参数的取值范围设置为(σ
p
,σ1),对取值范围(σ
p
,σ1)进行等间距的250点插值,得到由250个正则化参数值构成的正则化参数集合ω,用曲线拟合由正则化参数集合ω表示的点,得到250个点拟合的曲线,将曲线曲率最小时的ξ
omp
作为估计的正则化参数的值;根据分裂bregman算法对的无约束凸优化问题求解时获得的第一隐藏变量向量计算公式和第二隐藏变量向量的计算公式计算第一隐藏变量向量和第二隐藏变量向量的值,其中sgn(
·
)为符号函数,max(
·
)为最大值函数,|
·
|为取绝对值操作,ω={ξ1,ξ2,
…
,ξ
omp
,
…
ξ
250
},ξ
omp
为当曲线曲率最小时正则化参数集合ω中的元素;
[0100]
步骤7e)判断k》k且是否成立,若是,得到第n个距离单元的目标散射幅度向量值执行步骤(7f),否则令k=k 1,执行步骤(7c);
[0101]
步骤7f)判断n》n是否成立,若是,将n个距离单元的目标散射幅度向量拼接得到维数为n
×
(m l-1)前视成像区域目标散射幅度矩阵即扫描雷达前视高分辨图像,否则,令n=n 1,并执行步骤(7b)。
[0102]
以下通过仿真实验,对本发明的技术效果作进一步说明:
[0103]
1、仿真条件和内容:
[0104]
在扫描雷达的同一距离单元里面,布置575个目标点其中4个点目标的散射幅度设置为1,其余的目标点的散射幅度设置为0,4个散射幅度为1的目标点的方位角度分别为0.06
°
,-0.06
°
,0.17
°
,-0.17
°
,信噪比设置为25db,在同一台计算机上,利用matlab r2018b进行仿真,计算机的运行系统参数如表1所示:
[0105]
表1
[0106]
硬件或软件参数cpuinter(r)core(tm)i7-9700cpu内存64gb平台matlab 2018b
[0107]
获取回波的扫描雷达前视成像系统仿真参数如表2所示:
[0108]
表2
[0109]
波长31.25mm波束中心斜距5000m
扫描范围-3
°
~3
°
飞行速度(0,350,0)m/s高度350m信号带宽30mhz天线宽度3
°
重复频率2khz
[0110]
对本发明与现有技术中基于分裂bregman的前视扫描雷达超分辨成像方法的方位向分辨率和成像效率进行对比仿真,其方位向分辨率的仿真结果如图3所示。
[0111]
2、仿真结果分析:
[0112]
参照图3,横坐标表示目标的方位向角度,单位为度,方位向成像场景范围-3
°
~3
°
,纵坐标表示目标的归一化幅度,其中图3(a)为575个目标点的分布图,图3(b)为实孔径成像结果图,图3(c)为传统分裂bregman算法前视扫描成像结果,图3(d)为本发明实验结果;
[0113]
从图3中可以看出,图3(b)中的实孔径图像由于孔径限制,无法分辨同一距离单元里面,方位角比较近的4个散射幅度为1的目标点,图3(c)和图3(d)能够实现方位向角超分辨,没有假点出现,与实孔径的(a)比,成像结果在目标的位置以及幅度上面具有很好的效果;
[0114]
在处理一个距离单元所需要的时间上,传统分裂bregman算法需要15.21秒,本发明只需要7.98秒;在保证方位向高分辨成像的同时,本方法比传统分裂bregman算法效率高,本发明通过类卷积测量矩阵a的奇异值分解,将托普利茨矩阵求逆转化为酉基矩阵与对角矩阵的乘积,显著提升了成像效率,并且使用曲线对噪声平衡的正则化参数进行估计,对噪声抑制的效果具有稳定性,为实现前视扫描雷达快速成像提供了新思考。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。