1.本发明涉及电动汽车充电负荷系统,是一种电动汽车充电负荷的估算与建模方法。
背景技术:
2.目前,准确的电动汽车充电负荷估算模型能够为配电网优化运行与控制提供可靠的实时 充电预估信息,为配电网规划提供精细化的充电负荷时空特性输入。现有电动汽车充电负荷 技术,如中国专利文献中披露的申请号201710952465.0,申请公布日2018.02.13,发明名称
ꢀ“
一种考虑时空分布的电动汽车充电负荷预测方法”;再如中国专利文献中披露的申请号 202110978765.2,申请公布日2021.12.31,发明名称“一种考虑数据相关性的电动汽车充电 负荷预测方法”。但除上述方法之外,当前大多数的电动汽车充电负荷估算模型研究一般采用 单一模型,比如蒙特卡洛模型进行用户出行行为的预测,该模型较难很好地体现不同用户充 电需求多样性的特征,从而导致模拟误差。因此需要对用户的出行模式进行深入研究,结合 出行模式来预测用户的充电需求,而不是仅仅关注电动汽车自身电量变化规律。同时,现有 同类模型较少针对现有电动汽车渗透率较高场景下充电行为具有随机性和分散性的特点,提 出融合cnn和lstm电动汽车充电负荷估算模型,实现分时段估算充电负荷。
技术实现要素:
3.为克服上述不足,本发明的目的是向本领域提供一种电动汽车充电负荷的估算与建模方 法,使其主要解决现有同类方法较少采用cnn和lstm会快速获取不同时间段不同场景的充电 时空特征,导致模型评估的精度较低,及较少采用bp神经网络,拟合用户的充电偏好,建立 畅通的充电站处充电路段通道的技术问题。其目的是通过如下技术方案实现的。
4.一种电动汽车充电负荷的估算与建模方法,该方法通过获取电动汽车的出行轨迹,挖掘 电动汽车用户出行模式和充电模式,采用融合cnn和lstm分别对不同场景和不同时间段的出 行模式数据、充电模式数据进行时空特征提取,基于上述时空特征采用bp神经网络综合交通 路网状态实现分时段估算充电负荷;其特征在于所述cnn对数据进行获得某个时间段和某个 场景的空间特征,原始输入是以t为时间长度,n个样本所有接入的电动汽车在充电前一刻 的行驶里程数量、充电时长、充电前一刻的剩余电量、充电开始时间、充电结束时间的数据; 经过cnn的一系列处理,最后由n个神经元得到1
×
n维的空间特征向量:n维的空间特征向量:
5.接着,将充电接入的时间先后排列出行模式数据和充电模式数据,出行模式数据和充电 模式数据包括充电前一刻的行驶里程数量、充电时长、充电前一刻的剩余电量、充电开始时 间和充电结束时间,通过lstm提取某个时间段和某个场景的时间特征;
6.经过lstm处理后,在lstm的隐含层单元数量为n,最后隐含层输出n
×
m维时间特征
向 量:
7.在得到cnn和lstm的原始表达之后,引入注意力特征对特征表达进行融合,形成融合后 的时空特征表达f
map
,特征融合的表示方法为:
8.基于公式7,得到:
[0009][0010][0011]fmap
就是当前表达的出行模式和充电模式的时空特征。
[0012]
所述bp神经网络以当前交通状态和出行模式和充电模式时空特征为输入,估算电动汽车 在某一个时间段、某一个场景下充电负荷。
[0013]
所述获取电动汽车的出行轨迹,挖掘电动汽车用户出行模式和充电模式通过电动汽车的 gps点获取电动汽车的出行时间、出行地点、行驶时长、驻留时间和驻留地点,结合停驻位 置与充电站的重合度,判定用户是否存在充电行为和电动汽车充电时的电池荷电状态(soc), 获取用户的充电模式,所述充电模式包括行驶特性、充电方式、行驶行为和充电行为。
[0014]
所述电动汽车的gps点获取电动汽车的出行时间、出行地点、行驶时长、驻留时间和驻 留地点基于车联网平台的电动汽车轨迹的gps数据提取,即车联网平台对电动汽车轨迹数据 采用gps的方式记录,首先需要对电动汽车轨迹数据进行提取,包括gps点的时间和地理信 息;
[0015]
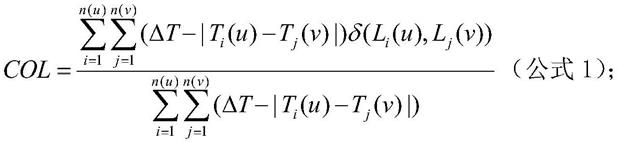
对gps数据进行预处理,由于gps数据受到随机因素的影响,因此gps点与道路之间的 垂直距离肯定是不相同的,接着需要对gps点进行预处理,并把gps点反映在道路的中心线 上;结合时间和地理因素,采用lcss算法的方法获取用户的充电模式,包括充电开始、充电 结束时间和充电地点;
[0016][0017]
其中,
△
t为时间精度,设为半个小时,δ(li(u),lj(v))是一个重合性公式,当两个 用户的充电站重合时,值为1,否则为0;如果col大于1/3,那么说明电动汽车在同一个充 电站内进行充电,假设有n个用户在某个
△
t为时间精度内充电;
[0018]
电动汽车电池剩余电量计算,在充电模式下,电动汽车剩余电量与日行驶距离;
[0019]qr,u
(t)=q
0,u-du(t)wuꢀꢀꢀ
(公式2);
[0020]
其中,q
0,u
其实电池电量,q
r,u
(t)充电前一个时刻的剩余电量;接着,通过大数据的方法, 统计每一周每一个时刻,以半小时为一个统计周期;某一个充电站的所有电动汽车充电前一 个时刻的平均剩余电量;
[0021][0022]
某一个充电站的站点在某一个时刻的充电负荷统计,获取该站点某
△
t时间精度开始充 电到该时刻结束时用户充电的平均时长:
[0023][0024]
其中,c表示
△
t时间精度结束时刻时n个用户电池的平均容量,当
△
t取30分钟,每 个
△
t开始时刻认为i是1,每个
△
t结束时刻认为是30得出结束时刻时n个用户电池的平 均容量;η时充电站的充电效率,pc是充电站的平均功率。
[0025]
该方法针对现有电动汽车渗透率较高场景下充电行为具有随机性和分散性的特点,提出 融合cnn和lstm电动汽车充电负荷估算模型,该模型有效提取不同场景和不同时间段的出行 模式数据、充电模式数据进行时空特征不同时间段、不同场景电动汽车行驶特性、行驶行为 (行驶特性和行驶行为统称为出行模式)、充电方式和充电行为(充电方式和充电行为统称为 充电模式)的时空特征,基于上述时空特征采用bp神经网络综合交通路网状态实现分时段估 算充电负荷。
[0026]
本发明的建模方式科学,模型精度高,符合使用者充电偏好,能很好户避开拥塞路段, 节约通行时间,减轻电动汽车的充电负荷;其适合作为电动汽车充电负荷的估算与建模方法, 及其同类模型和方法的技术改进。
具体实施方式
[0027]
现通过具体实施步骤进一步对本发明进行具体描述。
[0028]
(1)获取电动汽车的出行轨迹,挖掘电动汽车用户出行模式和充电模式
[0029]
通过电动汽车的gps点获取电动汽车的出行时间、出行地点、行驶时长、驻留时间和驻 留地点(形成用户出行模式的获取),结合停驻位置与充电站的重合度,判定用户是否存在充 电行为和电动汽车充电时的电池荷电状态(soc),获取用户的充电模式,所述充电模式包括 行驶特性、充电方式、行驶行为和充电行为。同时,由于电动汽车的电池变化规律复杂、数 据非线性程度高,很难建立精确的数学模型来对其进行描述,该方法通过融合cnn和lstm方 法对电动汽车的行驶特性、充电方式、行驶行为和充电行为的特征进行描述,并通过获取不 同时间段电动汽车行驶特性、充电方式、行驶行为和充电行为的时空分布特征,为充电负荷 的短期预测提供数据支撑。
[0030]
1、基于车联网平台的电动汽车轨迹的gps数据提取,即车联网平台对电动汽车轨迹数据 采用gps的方式记录,首先需要对电动汽车轨迹数据进行提取,包括gps点的时间和地理信 息。
[0031]
2、对gps数据进行预处理,由于gps数据受到随机因素的影响,因此gps点与道路之间 的垂直距离肯定是不相同的,接着需要对gps点进行预处理,并把gps点反映在道路的中心 线上。
[0032]
用户的gps轨迹点与道路中心线进行垂直处理,其垂足可视为用户的位置;同时,由于 用户的gps点在红绿灯路口或者塞车的时候会有大量的点出现,需要将道路中心线的
垂足进 行合并,如果点与点之间的距离小于100米,则将上述的点进行合并,合并后的点的位置在 两边垂足的中心位置上,合并点的时间取两边垂足的时间平均值。
[0033]
3、结合时间和地理因素,采用lcss算法的方法获取用户的充电模式,包括充电开始、 充电结束时间和充电地点;
[0034][0035]
其中,
△
t为时间精度,设为半个小时,δ(li(u),lj(v))是一个重合性公式,当两个 用户的充电站重合时,值为1,否则为0;如果col大于1/3,那么说明电动汽车在同一个充 电站内进行充电,假设有n个用户在某个
△
t为时间精度内充电。
[0036]
4、电动汽车电池剩余电量计算,在充电模式下,电动汽车剩余电量与日行驶距离;
[0037]qr,u
(t)=q
0,u-du(t)wuꢀꢀꢀ
(公式2);
[0038]
其中,q
0,u
其实电池电量,q
r,u
(t)充电前一个时刻的剩余电量;接着,通过大数据的方法, 统计每一周每一个时刻,以半小时为一个统计周期;某一个充电站的所有电动汽车充电前一 个时刻的平均剩余电量;
[0039][0040]
5、某一个充电站的站点在某一个时刻的充电负荷统计,获取该站点某
△
t时间精度开始 充电到该时刻结束时用户充电的平均时长:
[0041][0042]
其中,c表示
△
t时间精度结束时刻时n个用户电池的平均容量,当
△
t取30分钟,每 个
△
t开始时刻认为i是1,每个
△
t结束时刻认为是30得出结束时刻时n个用户电池的平 均容量;η时充电站的充电效率,pc是充电站的平均功率。
[0043]
至此,计算获取到整个城市领域的用户在充电前一刻的行驶里程数量、充电时长、充电 前一刻的剩余电量、充电开始时间、充电结束时间及充电地点。
[0044]
(2)采用融合cnn和lstm分别对不同场景和不同时间段的出行模式数据、充电模式数 据进行时空特征提取。
[0045]
1、通过cnn对数据进行获得某个时间段和某个场景的空间特征,原始输入是以t为时间 长度,n个样本(比如:所有大型购物中心充电站n个电动汽车用户)所有接入的电动汽车 在充电前一刻的行驶里程数量、充电时长、充电前一刻的剩余电量、充电开始时间、充电结 束时间的数据;经过cnn的一系列处理,最后由n个神经元得到1
×
n维的空间特征向量: [0046]
2、将充电接入的时间先后排列出行模式数据和充电模式数据,出行模式数据和充电模式 数据包括充电前一刻的行驶里程数量、充电时长、充电前一刻的剩余电量、充电开始时间和 充电结束时间,通过lstm提取某个时间段和某个场景的时间特征。
[0047]
经过lstm处理后,在lstm的隐含层单元数量为n,最后隐含层输出n
×
m维时间特征
向 量:
[0048]
在得到cnn和lstm的原始表达之后,引入注意力特征对特征表达进行融合,形成融合后 的时空特征表达f
map
,特征融合的表示方法为:
[0049]
基于公式7,得到:
[0050][0051][0052]fmap
就是当前表达的出行模式和充电模式的时空特征。
[0053]
(3)采用bp神经网络,以当前交通状态和出行模式和充电模式时空特征为输入,估算 电动汽车在某一个时间段、某一个场景下充电负荷。
[0054]
至此,根据实际的时空特征和交通状态即可预测整个城市领域内每一个场景在每个时刻 (
△
t时间精度)的充电负荷。该发明采用融合cnn和lstm提取某一个时间段、某个场景的 出行模式和充电模式数据的时空特征;由于充电数据具有随机性和周期性,采用cnn和lstm 会快速获取不同时间段不同场景的充电时空特征,提升模型评估的精度。同时,该方法采用 bp神经网络,结合交通状态实现不同场景和不同时间段充电负荷预测,交通状态分为四种: 畅通、轻度拥堵、拥堵、严重拥堵,充电用户和配电网在某一个时间段的充电负荷预测提供 数据支持。这种结合交通状态的方法,会很好地拟合用户的充电偏好,在交通道路比较拥挤 的情况下,为用户避开拥塞路段,通往路段相对畅通的充电站处充电,实现分时段估算充电 负荷。
[0055]
上述卷积神经网络(convolutional neural networks,cnn)是一类包含卷积计算且具 有深度结构的前馈神经网络,是深度学习的代表算法之一,具有表征学习能力,能够按其阶 层结构对输入信息进行平移不变分类,因此也被称为“平移不变人工神经网络”。卷积神经网 络仿造生物的视知觉机制构建,可以进行监督学习和非监督学习,其隐含层内的卷积核参数 共享和层间连接的稀疏性使得卷积神经网络能够以较小的计算量对格点化特征,例如像素和 音频进行学习、有稳定的效果且对数据没有额外的特征工程要求。
[0056]
上述长期短期记忆网络(long short-term memory,lstm)是递归神经网络的延伸,是 rnn的一种,比普通rnn高级,基本一般情况下说使用rnn都是使用lstm,现在很少有人使 用最基础版的rnn,因为lstm效果更好。长期短期记忆网络适合从中间有很长时间滞后的重 要经历中学习,lstm的单元被用作一个rnn层的构建单元,该rnn层通常被称为lstm网络, lstm使rnn能够长时间记住他们的输入,lstm将他们的信息包含在内存中,这很像计算机的 内存,因为lstm可以从内存读取、写入和删除信息。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。