1.本发明属于健身器材,尤其涉及一种激光投射跳绳机。
背景技术:
2.在学习,工作压力越来越大的现代生活中,人们也更加注重身体的锻炼和 健康的保证。当然,在快节奏的生活中,人们更需要的是一种尽可能方便,快 捷的运动方式。跳绳就是一项极佳的健体运动,能有效训练个人的反应和耐力,保有助保持个人体 态健美和协调性,从而达到强身健体的目的。但是传统的跳绳运动必须有人来摇绳才可以完成。
3.现有一些机器,能够代替人工进行自动甩绳,但是这些机器进行甩绳的时候,人们容易被绳子误伤,存在较大的安全隐患。
技术实现要素:
4.本发明针对现有技术中的不足,提供了一种激光投射跳绳机,采用无绳化的设计,从而能够避免误伤;并且结构简单,使用方面,并且占用面积小,便于推广使用。
5.为了解决上述技术问题,本发明通过下述技术方案得以解决:一种激光投射跳绳机,包括底座,所述底座上设置有动力源和模拟组件,所述动力源驱动所述模拟组件进行旋转;所述模拟组件设置有激光雷达组件,所述激光雷达组件设置有光线发射器、信号发射器和信号接收器。
6.上述技术方案中,优选地,所述模拟组件上还设置有调整机,所述调整机调节所述激光雷达组件的垂直角度;所述调整机设置有主轴,所述激光雷达组件的两侧设置有转轴,所述主轴和其中同侧的转轴之间设置有联动机构,所述调整机带动主轴转动,在通过所述联动机构的传动从而驱使转轴转动,以此驱使所述激光雷达组件改变角度。
7.上述技术方案中,优选地,所述联动机构包括主转盘和从转盘,所述主转盘安装于所述主轴上,所述从转盘安装于所述转轴上,所述主转盘和从转盘之间设置有连接杆,且连接杆和两个盘之间为转动连接。
8.上述技术方案中,优选地,所述底座上设置有支撑筒,所述支撑筒内固定设置有所述动力源,所述动力源的输出轴设置有输出轴套,所述输出轴套上设置有所述模拟组件。
9.上述技术方案中,优选地,所述支撑筒正中设置有安装孔,所述安装孔上部设置有隔板,所述安装孔内位于所述隔板下方通过螺栓连接的方式安装有所述动力源。
10.上述技术方案中,优选地,所述模拟组件包括转动盘,所述转动盘正中设置有中孔,所述中孔内设置有定位块,所述输出轴套上设置有定位凹槽,所述定位块卡入所述定位凹槽内,从而使得转动盘和输出轴套连接一体实现同步转动。
11.上述技术方案中,优选地,所述输出轴套外套设有轴承,且利用挡环避免其脱离;所述轴承上方设置有所述转动盘;所述中孔上方盖设有盖板,所述盖板穿设有螺栓,该螺栓下端拧入所述输出轴套内。
12.上述技术方案中,优选地,所述转动盘上设置有轴座,所述轴座用于支撑所述转
轴,苏搜狐轴座上可拆卸设置有上压块。
13.上述技术方案中,优选地,所述主转盘和所述从转盘沿着径向设置有若干个插孔,所述连接杆的两端插入两个盘上的插孔内。
14.上述技术方案中,优选地,所述支撑筒上设置有电路板,所述电路板信号连接所述调整机和激光雷达组件;所述电路板设置有无线通讯模块,用于接收外界控制信号,并进行相关操作。
15.本发明提供了一种激光投射跳绳机,利用激光雷达组件发射光线模拟绳子,再利用动力源驱动激光雷达组件转动,从而使得光线旋转,进行地面圆周扫绳作业,以此能够代替人力甩绳的动作,使用者只需跳起躲开扫过来的光线可实现跳绳运动。并且激光雷达组件还具有检测功能,能够检测使用者是否触碰到光线。采用本方案的跳绳机,光束能够无限延长,能够同时满足众多人们的跳绳需求;因此从设计角度分析,可满足的人数是无上限的。
附图说明
16.为了更清楚地说明本发明实施例或现有技术中的技术方案,以下将对 实施例或现有技术描述中所需要使用的附图进行论述,显然,在结合附图进行 描述的技术方案仅仅是本发明的一些实施例,对于本领域普通技术人员而 言,在不付出创造性劳动的前提下,还可以根据这些附图所示实施例得到其它 的实施例及其附图。
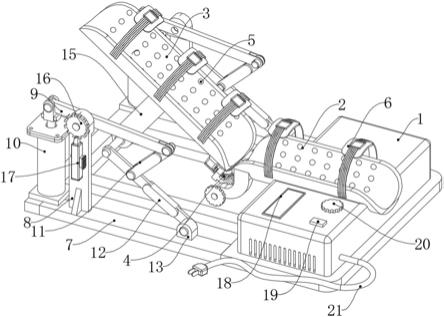
17.图1是本发明示意图。
18.图2是本发明的结构爆炸图。
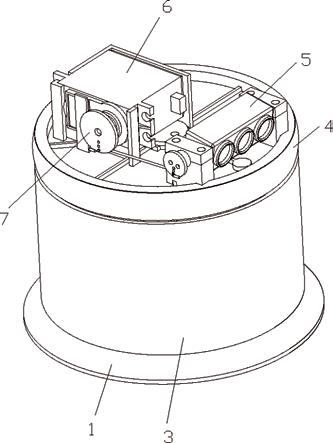
19.图3是本发明支撑筒的结构示意图。
20.图4是本发明模拟组件的结构爆炸图。
21.图5是本发明转动盘的结构示意图。
22.图6是本发明输出轴套的结构示意图。
23.图中:底座1,模拟组件10,动力源2,输出轴套21,定位凹槽211,挡环212,轴承22,支撑筒3,安装孔31,隔板32,电路板33,转动盘4,中孔41,定位块411,盖板412,轴座42,上压块421,激光雷达组件5,转轴51,调整机6,主轴61,联动机构7,主转盘71,从转盘72,连接杆73。
具体实施方式
24.以下将结合附图对本发明各实施例的技术方案进行清楚、完整的描述,显然,所描述的实施例仅仅是本发明的一部分实施例,而不是全部实施例。基于本发明中所述的实施例,本领域普通技术人员在不需要创造性劳动的 前提下所得到的所有其它实施例,都在本发明所保护的范围内。
25.如图1至图6所示,一种激光投射跳绳机,包括底座1,所述底座1上设置有动力源2和模拟组件10,所述动力源2驱动所述模拟组件10进行旋转;所述模拟组件10设置有激光雷达组件5,所述激光雷达组件5设置有光线发射器、信号发射器和信号接收器。
26.所述模拟组件10上还设置有调整机6,所述调整机6调节所述激光雷达组件5的垂直角度。
27.本装置的激光雷达组件设置有光线发射器、信号发射器和信号接收器:一个可以发射一束激光光束,当做旋转的跳绳,一个可以发射一组测距雷达信号,一个是接收返回的雷达信号,算出人体距离。
28.本装置的原理是:数码舵机的舵角带动激光雷达组件,使雷达组件有俯仰角,发射出去的光束和信号会和地面有个焦点,通过通知角度,来控制光束和信号投射的距离,假设光束投射距离为5米,那测距系统就会在5米内采集是否有障碍物,如果检测到有,说明人体没有跳过旋转的光束,意义上就是被绳子绊住,属于不合格的跳绳数,依次类推,相对传统电动跳绳器(带绳子的)来讲,光束可以无线延长,可以多人数一起跳。而且,采用光束代替绳子,就能够避免误伤情况发生了。
29.调整机6能够调整激光雷达组件5的俯仰角,具体的结构设置是:所述调整机6设置有主轴61,所述激光雷达组件5的两侧设置有转轴51,所述主轴61和其中同侧的转轴51之间设置有联动机构7,所述调整机6带动主轴61转动,在通过所述联动机构7的传动从而驱使转轴51转动,以此驱使所述激光雷达组件5改变角度。本装置的调整机6可使用数码舵机。联动机构7包括主转盘71和从转盘72,所述主转盘71安装于所述主轴61上,所述从转盘72安装于所述转轴51上,所述主转盘71和从转盘72之间设置有连接杆73,且连接杆73和两个盘之间为转动连接。
30.所述底座1上设置有支撑筒3,所述支撑筒3内固定设置有所述动力源2,所述动力源2的输出轴设置有输出轴套21,所述输出轴套21上设置有所述模拟组件10。本装置的动力源2采用驱动减速电机,利用该电机带动上面转动盘4旋转。
31.所述支撑筒3正中设置有安装孔31,所述安装孔31上部设置有隔板32,所述安装孔31内位于所述隔板32下方通过螺栓连接的方式安装有所述动力源2。
32.所述模拟组件10包括转动盘4,所述转动盘4正中设置有中孔41,所述中孔41内设置有定位块411,所述输出轴套21上设置有定位凹槽211,所述定位块211卡入所述定位凹槽211内,从而使得转动盘4和输出轴套21连接一体实现同步转动。
33.所述输出轴套21外套设有轴承22,且利用挡环212避免其脱离;所述轴承22上方设置有所述转动盘4;所述中孔41上方盖设有盖板412,所述盖板412穿设有螺栓,该螺栓下端拧入所述输出轴套21内。
34.所述转动盘4上设置有轴座42,所述轴座42用于支撑所述转轴51,苏搜狐轴座42上可拆卸设置有上压块421。
35.所述主转盘71和所述从转盘72沿着径向设置有若干个插孔,所述连接杆73的两端插入两个盘上的插孔内。
36.所述支撑筒3上设置有电路板33,所述电路板3信号连接所述调整机6和激光雷达组件5;所述电路板33设置有无线通讯模块,用于接收外界控制信号,并进行相关操作。
37.此外,本装置还设置有计数机构,该计数机构设置有传感器,用于检测转动盘4转动的圈数,配合激光雷达组件5就能够统计跳绳的次数。
38.技术机构和电路板33信号连接,受其控制。
39.对于本领域技术人员而言,显然本发明不限于上述示范性实施例的细节,而且在不背离本发明的精神或基本特征的情况下,能够以其他的具体形式实现本发明。因此,无论从哪一点来看,均应将实施例看作是示范性的,而且是非限制性的。本发明的范围由所附权
利要求进行限定,而不是上述说明限定,因此旨在将落在权利要求的等同要件的含义和范围内的所有变化囊括在本发明内。不应将权利要求中的任何附图标记视为限制所涉及的权利要求。
40.此外,应当理解,虽然本说明书按照实施方式加以描述,但并非每个实施方式仅包含一个独立的技术方案,说明书的这种叙述方式仅仅是为清楚起见,本领域技术人员应当将说明书作为一个整体,各实施例中的技术方案也可以经适当组合,形成本领域技术人员可以理解的其他实施方式。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。