1.本发明涉及积木玩具信号传感器用途研发技术领域,尤其涉及一种积木玩具信号传感器的新用法及积木玩具遥控器。
背景技术:
2.信号传感器通常包括惯性传感器、光传感器、声音传感器、触摸传感器、超声波传感器、陀螺仪传感器、视觉传感器、霍尔磁传感器、颜色传感器、压力传感器、动作传感器、激光传感器、人体红外传感器等。所述积木玩具信号传感器就是在这些种类的信号传感器制作成一个积木玩具模块,使其能够直接参与积木玩具造型的拼接。例如,在信号传感器的外壳上设置一些颗粒类积木玩具的“圆柱凸粒”或“圆柱凸粒嵌入口”,这样的信号传感器就变成“颗粒积木玩具信号传感器”。
3.所述颗粒积木玩具是指“乐高经典颗粒”类积木玩具,所述“乐高经典颗粒”类积木玩具的各种积木模块中,“板”或“砖”是两种最基础的积木模块;所述“板”和“砖”都是方形壳体,在方形壳体的顶部设有“圆柱凸粒”,如图7、图8中的附图标记a所示的圆柱凸粒;方形壳体空腔的开口处设有“圆柱凸粒的嵌入口”,如图7、图8中附图标记b所示的虚线圆形部位;所述“板”和“砖”顶部的圆柱凸粒的数量与方形壳体空腔开口处的圆柱凸粒嵌入口的数量对应设置,且公称直径相等,均为4.8毫米;圆柱凸粒与圆柱凸粒嵌入口之间采取微量过盈配合,利用“穴、柱连接原理”,一个积木模块的圆柱凸粒挤压进另一个积木模块的圆柱凸粒嵌入口中,两个积木模块即可牢靠的拼接在一起,通过这样的拼接,可以拼装成各种各样的玩具造型;本发明将所述圆柱凸粒、圆柱凸粒嵌入口统称为积木模块上的拼接结构。
4.现有技术中,所述积木玩具信号传感器通常是作为智能积木玩具主控系统的一个启动信号模块使用的,例如:浇花器、宠物喂食器等智能积木玩具的智能控制装置主控系统中都配置了一个积木玩具光传感器,通过积木玩具光传感器发出的光感信号控制浇花器、宠物喂食器开始工作。这样引发的实际问题是:当主人每天都在家的时候,会及时打开窗帘,让自然光照射到浇花器、宠物喂食器的积木玩具光传感器上,浇花器、宠物喂食器等就会按设定的程序完成工作,但是,当主人出差的时候,通常会将窗帘关闭起来,这种情况下,这些智能家居每天就无法自动启动进行工作了;
5.另一种情况:如果若干个智能家居积木玩具的智能装置都是用积木玩具触摸传感器控制的,当需要这些积木玩具智能装置同时工作时,就要去触摸每一个积木玩具智能装置的积木玩具触摸传感器,显然,这样操作起来就很麻烦。
6.由此可见,现有技术中积木玩具信号传感器的使用方法还存在着亟待解决的技术问题。
技术实现要素:
7.为解决现有技术中积木玩具信号传感器的使用中存在的技术问题,本发明提出一种积木玩具信号传感器的新用法及积木玩具遥控器的技术方案如下:
8.一种积木玩具信号传感器的新用法,所述积木玩具信号传感器的新用法包括以下步骤:
9.步骤1:设置一个积木玩具信号传感器;所述积木玩具信号传感器设有一个带供电通讯插头的供电通讯数据线;
10.步骤2:设置一个积木玩具遥控器;所述积木玩具遥控器设有供电通讯插口,所述供电通讯插口与所述积木玩具遥控器主控系统的遥控mcu连接,所述供电通讯插口与步骤1所述积木玩具信号传感器的供电通讯插头匹配,所述积木玩具遥控器主控系统的遥控mcu可以储存、接收、识别并通过积木玩具遥控器主控系统的2.4g通讯模块发送所述积木玩具信号传感器产生的感应信号;
11.步骤3:在每一个积木玩具智能装置的主控系统中,都设置有接收、识别步骤2所述积木玩具遥控器发送的所述感应信号的工作程序,并驱动所述积木玩具智能装置执行所述感应信号代表的工作程序。
12.一种积木玩具遥控器,所述积木玩具遥控器是在一个普通的积木玩具遥控器上设置供电通讯插口,所述供电通讯插口与所述积木玩具遥控器主控系统的遥控mcu连接,所述供电通讯插口可以插接所述积木玩具信号传感器的供电通讯插头,所述积木玩具遥控器主控系统的遥控mcu可以储存、接收、识别并通过积木玩具遥控器主控系统的2.4g通讯模块发送所述积木玩具信号传感器产生的感应信号。
13.所述一种积木玩具信号传感器的新用法及积木玩具遥控器的应用场景示例一:
14.将一个所述积木玩具遥控器的供电通讯插口上插接一个所述积木玩具光传感器,将所述积木玩具遥控器放置在不易被窗帘或其他物件遮挡的室外光线的地方,例如窗外的窗台上;将若干个积木玩具智能装置控制系统中的积木玩具光传感器拆除,并在每一个积木玩具智能装置的主控系统中设置接收、识别所述积木玩具遥控器发送的所述感应信号的工作程序,以及执行所述感应信号代表的工作程序的指令;这样,无论当主人每天是否在家,自然光都会照射到所述积木玩具遥控器的积木玩具光传感器上,所述积木玩具遥控器就会按时启动各个所述积木玩具智能装置。
15.所述一种积木玩具信号传感器的新用法及积木玩具遥控器的应用场景示例二:
16.将一个所述积木玩具遥控器的供电通讯插口上插接一个所述积木玩具触摸传感器,将所述积木玩具遥控器放置在一个便于操作的地方,例如茶几台面上;将若干个积木玩具智能装置控制系统中的积木玩具触摸传感器拆除,并在每一个积木玩具智能装置的主控系统中设置接收、识别所述积木玩具遥控器发送的所述感应信号的工作程序,以及执行所述感应信号代表的工作程序的指令;这样,如果主人需要这些积木玩具智能装置工作时,只要触摸一下所述积木玩具遥控器上的积木玩具触摸传感器,就可以启动这些积木玩具智能装置,操作非常简捷方便。
17.所述一种积木玩具信号传感器的新用法及积木玩具遥控器的应用场景示例三:
18.现有技术中,所述普通遥控器的遥控功能都是通过触动面板上的按键选择遥控指令的;通常,遥控器面板上设置有八个遥控按键。但是,随着科技的发展进步,遥控积木玩具的复杂程度越来越高,需要遥控的功能也越来越多;按传统的思维习惯,对这类玩具的遥控,就需要在遥控器面板上增加足够多的遥控按键;这样的解决方案,虽然能够实现遥控的目的,但同时也增加了遥控器的设计与使用难度:在设计方面,控制系统的结构变得复杂;
在使用方面,遥控器面板上大量的按键令人眼花缭乱,很难符合人体工程学的设计要求,同时,产品的成本也会相应的增加。
19.但是,使用本发明所述一种积木玩具信号传感器的新用法及积木玩具遥控器,这个问题就可以得到有效地解决;例如:一种遥控积木玩具坦克车,现有技术中设置的动作功能通常包括前进、后退、左转、右转、机枪发射、火炮发射、炮塔左转、炮塔右转等八个动作,在积木玩具遥控器上对应的设置有八个遥控按键,每个遥控按键控制一个动作;如果为遥控积木玩具坦克车再增加其他的动作,例如火炮炮管的俯仰动作,按惯常的思维,需要在积木玩具遥控器上增加按键,相应的,积木玩具遥控器的遥控系统也要做相应的改进。从遥控器面板设计的角度看,新增遥控按键的布局比较困难,从人体工程学的角度看,即使在遥控器面板上布设了新增加的遥控按键,也不便于灵活操作。
20.针对这样的技术问题,解决方案包括三个部分:首先,在所述遥控积木玩具坦克车的控制系统中加载炮管俯仰的控制程序及相应的信号编码;第二,在遥控器上设置一个与传感器建立供电通讯连接的供电通讯插口,即成为本发明所述的积木玩具信号传感器的新用法及积木玩具遥控器;第三,在一个惯性传感器中设置好相应的体感动作的编码信号,然后将惯性传感器的供电通讯插头插接在所述积木玩具遥控器的供电通讯插口上,所述的积木玩具遥控器即可投入使用:所述积木玩具遥控器上原有的遥控按键仍保持既定的控制功能,当炮管需要做俯仰动作时,操作者双手端着所述积木玩具遥控器向上扬起,所述惯性传感器即识别该动作的体感信号及对应的编码,并通过所述积木玩具遥控器发射至所述遥控玩具坦克车的控制系统,所述遥控玩具坦克车的控制系统即接收、识别并执行该体感信号编码对应的控制程序,使炮管向上仰起;反之,当操作者双手端着所述积木玩具遥控器向下落,所述惯性传感器即识别该动作的体感信号及对应的编码,并通过所述积木玩具遥控器发射至所述遥控玩具坦克车的控制系统,所述遥控玩具坦克车的控制系统即接收、识别并执行该体感信号编码对应的控制程序,使炮管向下俯落。
21.所述一种积木玩具信号传感器的新用法及积木玩具遥控器的应用场景示例四:
22.现有技术中,一些遥控照明灯组中的灯所处位置的光亮度发生变化时,需要人工通过手动触压遥控器的遥控按键来实现。
23.但是,应用本发明所述一种积木玩具信号传感器的新用法及积木玩具遥控器,即可将所述积木玩具遥控器改变成一种智能遥控器。例如:将所述积木玩具遥控器上插接一个积木玩具光传感器,再将所述遥控照明灯组的控制系统中加载积木玩具光传感器信号接收、识别及执行的控制程序;在一个积木玩具光传感器中设置好相应的光感应信号及编码,然后将其供电通讯插头插接在所述积木玩具遥控器的供电通讯插口上,所述的积木玩具遥控器即可投入使用:将所述积木玩具遥控器放置在所述遥控照明灯组所在环境的适当位置,当所述环境的光亮度发生变化时,所述积木玩具光传感器即会对环境的光亮度状态进行感应、识别,若所识别的光亮状态符合所述积木玩具光传感器预设的光感应信号编码时,所述积木玩具光传感器即通过所述积木玩具遥控器的遥控系统将该光感应信号编码发送至所述遥控照明灯组的控制系统,所述遥控照明灯组的控制系统即接收、识别并执行光感信号编码对应的控制程序,调整遥控照明灯组的亮度。
24.与智能积木玩具现有技术相比,本发明所述一种积木玩具信号传感器的新用法及积木玩具遥控器的创新点是:改进了感应信号的发送途径,即将感应信号的有线发送,改为
通过2.4g通讯网络进行无线发送;所做的创新改进包括两个方面:一方面是利用现有技术积木玩具遥控器的遥控mcu中富余的io接口和存储空间,根据智能积木玩具功能设置的需要,在积木玩具遥控器的遥控mcu上增加1个或若干个供电通讯接口,接入相应的积木玩具信号传感器;另一方面,将所述智能积木玩具控制系统中加载1个或若干个相应的接收与处理感应信号的工作程序;然后,通过智能移动终端分别在所述积木玩具遥控器的遥控mcu中和所述智能积木玩具的主控mcu中编辑、修改、存储相应的控制程序,即完成了本发明所述的创新改进。
25.因此,本发明所述一种积木玩具信号传感器的新用法及积木玩具遥控器的有益效果在于:通过对现有技术的积木玩具遥控器的进行简便易行创新改进,即方便、有效地解决了用普通遥控器对功能复杂的积木玩具进行遥控的技术问题,或者将现有的积木玩具遥控器改进为智能遥控器,创新改进后所获得的产品具有良好的经济效益。
26.在上述核心技术方案的基础上,根据实际情况,对所述一种积木玩具信号传感器的新用法及积木玩具遥控器的一些技术特征做进一步的改进限定,还能够获得多种优化的技术方案。
附图说明
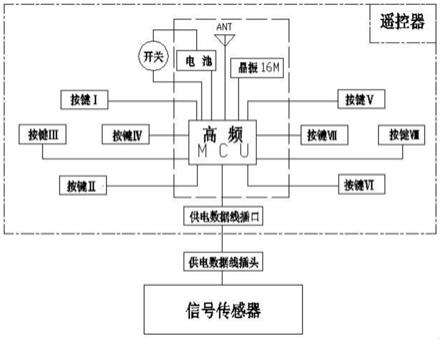
27.图1是现有技术中的一种积木玩具遥控器遥控系统的结构框图。
28.图2是本发明所述一种积木玩具信号传感器的新用法及积木玩具遥控器的遥控系统的结构框图,与图1相比,其遥控系统增加了一个供电通讯插口。
29.图3是图2所述一种积木玩具信号传感器的新用法及积木玩具遥控器的遥控系统与积木玩具信号传感器建立供电通讯连接的结构框图。
30.图4是图3所述一种积木玩具信号传感器的新用法及积木玩具遥控器的遥控系统与积木玩具惯性传感器建立供电通讯连接的结构框图。
31.图5是图3所述一种积木玩具信号传感器的新用法及积木玩具遥控器的遥控系统与积木玩具光传感器建立供电通讯连接的结构框图。
32.图6是图2所述一种积木玩具信号传感器的新用法及积木玩具遥控器的遥控系统改进的结构框图,改进点在于可以设置两个或两个以上的供电通讯插口。
33.图7是所述“乐高经典颗粒”类积木玩具中一种积木模块“板”的示意图,高度为3.2毫米,顶部有四个圆柱凸粒a,底部空腔内有四个圆柱凸粒嵌入口b。
34.图8是所述“乐高经典颗粒”类积木玩具中另一种积木模块“砖”的示意图,高度为9.6毫米,顶部有四个圆柱凸粒a,底部空腔内有四个圆柱凸粒嵌入口b。
35.附图标记说明:
36.a型圆柱凸粒,是指“乐高经典颗粒”类积木玩具的标准型圆柱凸粒,即直径为4.8毫米,高度为1.8毫米;
37.b型圆柱凸粒嵌入口,是指“乐高经典颗粒”类积木玩具的一种标准型的圆柱凸粒嵌入口,即直径为4.8毫米,高度大于1.8毫米。
具体实施方式
38.下面结合具体实施方式,对本发明所述一种积木玩具信号传感器的新用法及积木
玩具遥控器的技术方案做进一步说明:
39.实施例一:
40.如图2至图5所示,一种积木玩具信号传感器的新用法,所述积木玩具信号传感器的新用法包括以下步骤:
41.步骤1:设置一个积木玩具信号传感器;所述积木玩具信号传感器设有一个带供电通讯插头的供电通讯数据线;
42.步骤2:设置一个积木玩具遥控器;在所述积木玩具遥控器上设置供电通讯插口,所述供电通讯插口与所述积木玩具遥控器主控系统的遥控mcu连接,所述供电通讯插口与步骤1所述积木玩具信号传感器的供电通讯插头匹配,所述积木玩具遥控器主控系统的遥控mcu可以储存、接收、识别并通过积木玩具遥控器主控系统的2.4g通讯模块发送所述积木玩具信号传感器产生的感应信号;
43.步骤3:在每一个积木玩具智能装置的主控系统中,都设置有接收、识别步骤2所述积木玩具遥控器发送的所述感应信号的工作程序,并根据所述感应信号驱动所述积木玩具智能装置执行相应的工作程序。
44.实施例二:
45.与实施例一相比,本实施例的区别在于:步骤1所述积木玩具信号传感器的类型包括惯性传感器、光传感器、声音传感器、触摸传感器、超声波传感器、陀螺仪传感器、视觉传感器、霍尔磁传感器、颜色传感器、压力传感器、动作传感器、激光传感器或人体红外传感器;所述积木玩具信号传感器的类型与数量根据遥控积木玩具的功能确定。
46.实施例三:
47.与实施例一相比,本实施例的区别在于:步骤2所述供电通讯插口是指常用的数据线接口,包括mini usb型、micro usb型或type-c型接口。
48.实施例四:
49.如图6所示,与实施例一相比,本实施例的区别在于:步骤2所述主控系统的遥控mcu还可以接入2个或2个以上的同一类型或不同类型的供电通讯插口。
50.实施例五:
51.一种积木玩具遥控器,所述积木玩具遥控器是在一个普通的积木玩具遥控器上设置供电通讯插口,所述供电通讯插口与所述积木玩具遥控器主控系统的遥控mcu连接,所述供电通讯插口与所述积木玩具信号传感器的供电通讯插头匹配,所述积木玩具遥控器主控系统的遥控mcu可以储存、接收、识别并通过积木玩具遥控器主控系统的2.4g通讯模块发送所述积木玩具信号传感器产生的感应信号。
52.实施例六:
53.如图6所示,与实施例五相比,本实施例的区别在于:所述积木玩具遥控器主控系统的遥控mcu还可以接入2个或2个以上的同一类型或不同类型的供电通讯插口。
54.实施例七:
55.与实施例五相比,本实施例的区别在于:所述积木玩具遥控器的供电通讯插口是指常用的数据线接口,包括mini usb型、micro usb型或type-c型接口。
56.实施例八:
57.与实施例五相比,本实施例的区别在于:所述积木玩具信号传感器的类型包括惯
性传感器、光传感器、声音传感器、触摸传感器、超声波传感器、陀螺仪传感器、视觉传感器、霍尔磁传感器、颜色传感器、压力传感器、动作传感器、激光传感器或人体红外传感器;所述积木玩具信号传感器的类型与数量根据遥控积木玩具的功能确定。
58.实施例九:
59.与实施例五相比,本实施例的区别在于:所述一种积木玩具遥控器及所述积木玩具信号传感器的壳体外面设有颗粒类积木玩具的拼接结构,包括圆柱凸粒、圆柱凸粒嵌入口或插销孔。
60.实施例十:
61.一种无线超声波定位系统,所述无线超声波定位系统包括4个实施例五所述的积木玩具遥控器,其中3个所述积木玩具遥控器各接入1个积木玩具超声波接收传感器,第四个积木玩具遥控器接入1个积木玩具超声波发射传感器,;所述1个搭载了积木玩具超声波发射传感器的积木玩具遥控器安装在所述智能移动设备上,3个所述搭载了积木玩具超声波接收传感器的积木玩具遥控器分别布置在所述智能移动设备活动的场地周围,组合成一个无线超声波定位系统,能够即时确定所述智能移动设备所在位置的平面坐标。
62.在智能机器人编程比赛项目中,一种常用的模式是:在一个限定的场地中,设置若干个功能演示点,然后要求参赛的智能机器人按规定的顺序依次到达每个功能演示点完成功能演示,以准确完成全部功能演示并用时最少的智能机器人获胜。现有技术中,参赛的智能机器人从一个演示点向另一个演示点的移动,是通过“巡线法”进行控制的,即依次在各个演示点之间预先设置路线标识,然后在智能机器人上安装路线标识识别装置,智能机器人根据识别装置反馈的信号进行移动,以保证准确地到达预定的演示点;由于参赛的智能机器人的驱动装置都存在有一定的误差,因此,智能机器人从一个演示点向另一个演示点移动的过程中,移动方向经常会出现偏差,智能机器人的控制系统需要根据识别装置反馈的信号及时进行校正,以保证移动方向正确,这样就会消耗许多时间。采用本实施例所述的无线超声波定位系统,其有益效果在于:通过超声波测距定位的方法,智能机器人的控制系统能够根据自己位置的坐标点与需要到达的演示点的坐标,迅速调控并保证准确地移动方向,这样的巡线定位方式,不仅会大大的节约移动时间,而且比赛场地也会相对简单整洁。
63.本发明所述一种积木玩具信号传感器的新用法及积木玩具遥控器的有益效果在于:本发明的实质是将利用现有技术的积木玩具遥控器和传感器,通过对所述积木玩具遥控器做简单的改进,即可有效地解决用普通遥控器遥控功能复杂的积木玩具的技术问题;还可以将现有的积木玩具遥控器改进为智能遥控器,有效地提高遥控器使用率;因此,本发明在技术改进方面的优点是简便易行、在经济方面的优点是成本低廉。
64.以上所述,仅为本发明较佳的具体实施方式,但本发明的保护范围并不局限于此,任何熟悉本技术领域的技术人员在本发明披露的技术范围内,根据本发明的技术方案及其实施例构思加以等同替换或改变,都应涵盖在本发明的保护范围之内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。