1.本发明涉及医疗器械技术领域,具体来说,涉及一种骨科手肘康复训练装置。
2.
背景技术:
3.当患者手臂受伤后,肘关节长期不能转动,会导致手臂活动困难,甚至出现肌肉萎缩现象。目前的手肘康复锻炼的方式主要有人工和康复锻炼辅助装置两种,人工方式虽然可以根据患者手臂不同状况采取不同的康复锻炼方式,以满足其不同的需求,以免长久吊着导致上肢肌肉萎缩退化,一般通过上肢训练为手臂拉动骨折专用床上的把手进行,但有的病人在训练时容易出现手滑情况,身体直接后仰躺在床上,对病人造成二次伤害。
4.人工方式效率低,而且还占用了大量辅助人员的时间;而且现有的手肘康复锻炼装置大多结构比较固定,功能单一,操作不便,而且价格昂贵,患者需在医务人员的辅助与指导下才能完成手臂锻炼操作,不仅额外占用医务人员较多的时间,而且也给患者带来较高的医疗费用;另外现有的手肘康复锻炼装置主要是对患者的手臂进行支撑并使其转动,这种支撑方式患者的手臂处于被动运动,患者无法选择性的对支撑力进行调节,从而实现主动锻炼。
5.针对相关技术中的问题,目前尚未提出有效的解决方案。
6.
技术实现要素:
7.针对相关技术中的问题,本发明提出一种骨科手肘康复训练装置,以克服现有相关技术所存在的上述技术问题。
8.为此,本发明采用的具体技术方案如下:一种骨科手肘康复训练装置,包括电控箱、第一护具及第二护具;第一护具卡接于电控箱的顶端中部,第一护具的一端通过调节组件转动设置有第二护具,第一护具及第二护具的内侧均匀设置有若干按摩球,且第一护具及第二护具的外侧等距设置有若干绑带;电控箱的一侧底部设置有支撑架,支撑架远离电控箱的一端顶部对称设置有两组支撑柱,支撑柱的顶端转动设置有第一转动杆;第一转动杆的一端竖直设置有支撑组件,第一转动杆的另一端与第二转动杆的一端转动连接,第二转动杆的另一端与第三转动杆的中部转动连接,第三转动杆的一端通过固定座与支撑架的顶端转动连接,且两组第三转动杆的另一端之间转动设置有转轴,转轴的中部外侧套设有滚筒,滚筒的外壁与第二护具的外壁相贴合,其中一组第一转动杆的中部固定连接设置有限位棘轮,限位棘轮的下方竖直设置有限位组件,限位组件与支撑柱的侧面固定连接。
9.进一步的,为了实现智能控制,电控箱的顶端一侧依次设置有数字显示屏、开关按钮及电流调节旋钮,电控箱的侧面连接设置有电源线,电控箱的内部固定设置有plc控制芯片,电控箱的内部并位于第一护具的正下方螺旋设置有加热丝,且电控箱的两侧均开设有
散热孔。
10.进一步的,为了克服现有训练装置只能实现单一平面转动的缺陷,调节组件包括水平套设于第一护具一侧底部的蜗杆,蜗杆的中部套设有转动架,转动架的中部内侧转动设置有与蜗杆相啮合的蜗轮,蜗轮的两端通过连接杆转动设置有支撑座,支撑座的顶端与第二护具的外壁固定连接,且蜗杆的端部均套设有转轮。
11.进一步的,为了对患者手臂提供大小可调的支撑力,支撑组件包括与支撑架顶端固定连接的套筒,套筒的内部从下至上依次设置有第一铁芯、第一压缩弹簧、第二铁芯及活塞,且套筒的顶端设置有封盖;活塞的顶端固定设置有t形块,t形块的外侧套设有滑块,滑块的顶端与第一转动杆的一端转动连接。
12.进一步的,为了实现第一铁芯与第二铁芯的相互吸引,第一铁芯及第二铁芯的外侧均缠绕设置有线圈,且第一铁芯与套筒的内底端固定连接,第二铁芯与活塞固定连接并滑动设置于套筒的内部,滑块的底部开设有与t形块相配合的槽口,且滑块与t形块之间为间隙配合。
13.进一步的,为了保证在患者手臂不施力时,第二护具仍具有稳定的支撑力,限位组件包括与第一转动杆中部固定连接的壳体,壳体的内部从下至上依次设置有第二压缩弹簧及伸缩块,且壳体的底端设置有挡块;伸缩块的中部开设有梯形槽口,梯形槽口的内部穿插设置有按压块,按压块的一端旋接设置有限位螺丝,梯形槽口及按压块的截面均为梯形结构,且按压块与伸缩块垂直;伸缩块的顶端设置有斜切面结构,且斜切面朝向远离电控箱的方向。
14.本发明的有益效果为:1、本发明通过设置支撑组件,可以实现对第一转动杆进行支撑,第一转动杆将支撑力分别通过第二转动杆及第三转动杆传送至转轴上,从而利用滚筒对第二护具进行支撑,其中支撑组件的支撑力可调,从而实现患者对手臂进行主动锻炼,进而加快康复时间。
15.2、通过设置通电后相互吸引的第一铁芯及第二铁芯,可以实现通过转动电流调节旋钮对患者手臂提供大小可调的支撑力,其中第一压缩弹簧可以实现第二护具的复位,从而达到更好且更有效的训练效果。
16.3、本发明通过设置调节组件,不仅可以对第二护具进行支撑,而且还可以对第二护具的横向方向进行调节,从而实现患者手臂的多角度转动,克服了现有训练装置只能实现单一平面转动的缺陷。
17.4、通过设置限位棘轮及限位组件,可以实现第二护具在纵向平面上的单向转动,从而保证在患者手臂不施力时,第二护具仍具有稳定的支撑力,从而防止对患者的手臂造成二次伤害。
18.5、本发明通过在第一护具及第二护具上设置按摩球,可以保证对患者手臂进行挤压,从而增加训练装置按摩功能,其中第一护具下方的加热丝可以对患者手臂进行加热,这样不仅保证患者的舒适性,而且还可以加快患者手臂的血液循环,有助于康复训练。
19.附图说明
20.为了更清楚地说明本发明实施例或现有技术中的技术方案,下面将对实施例中所
需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本发明的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。
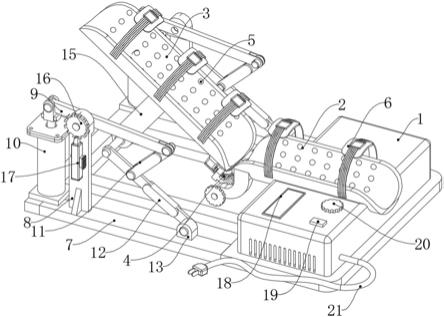
21.图1是根据本发明实施例的一种骨科手肘康复训练装置的轴测图;图2是根据本发明实施例的一种骨科手肘康复训练装置中支撑组件与转动杆的配合示意图;图3是根据本发明实施例的一种骨科手肘康复训练装置中电控箱的仰视图;图4是根据本发明实施例的一种骨科手肘康复训练装置中调节组件与护具的配合示意图;图5是根据本发明实施例的一种骨科手肘康复训练装置中调节组件的结构示意图;图6是根据本发明实施例的一种骨科手肘康复训练装置中支撑组件的剖视图;图7是根据本发明实施例的一种骨科手肘康复训练装置中支撑组件的爆炸图;图8是根据本发明实施例的一种骨科手肘康复训练装置中限位组件的剖视图;图9是根据本发明实施例的一种骨科手肘康复训练装置中限位组件的爆炸图;图10是图2中a处的局部放大图。
22.图中:1、电控箱;2、第一护具;3、第二护具;4、调节组件;401、蜗杆;402、转动架;403、蜗轮;404、连接杆;405、支撑座;406、转轮;5、按摩球;6、绑带;7、支撑架;8、支撑柱;9、第一转动杆;10、支撑组件;1001、套筒;1002、第一铁芯;1003、第一压缩弹簧;1004、第二铁芯;1005、活塞;1006、封盖;1007、t形块;1008、滑块;1009、线圈;11、第二转动杆;12、第三转动杆;13、固定座;14、转轴;15、滚筒;16、限位棘轮;17、限位组件;1701、壳体;1702、第二压缩弹簧;1703、伸缩块;1704、挡块;1705、梯形槽口;1706、按压块;1707、限位螺丝;18、显示屏;19、开关按钮;20、电流调节旋钮;21、电源线;22、plc控制芯片;23、加热丝;24、散热孔。
23.具体实施方式
24.为进一步说明各实施例,本发明提供有附图,这些附图为本发明揭露内容的一部分,其主要用以说明实施例,并可配合说明书的相关描述来解释实施例的运作原理,配合参考这些内容,本领域普通技术人员应能理解其他可能的实施方式以及本发明的优点,图中的组件并未按比例绘制,而类似的组件符号通常用来表示类似的组件。
25.根据本发明的实施例,提供了一种骨科手肘康复训练装置。
26.现结合附图和具体实施方式对本发明进一步说明,如图1-2所示,根据本发明实施例的骨科手肘康复训练装置,包括电控箱1、第一护具2及第二护具3;第一护具2卡接于电控箱1的顶端中部,第一护具2的一端通过调节组件4转动设置有第二护具3,第一护具2及第二护具3的内侧均匀设置有若干按摩球5,且第一护具2及第二护具3的外侧等距设置有若干绑带6;电控箱1的一侧底部设置有支撑架7,支撑架7远离电控箱1的一端顶部对称设置有两组支撑柱8,支撑柱8的顶端转动设置有第一转动杆9;第一转动杆9的一端竖直设置有支撑组件10,第一转动杆9的另一端与第二转动杆11的一端转动连接,第二转动杆11的另一端与第
三转动杆12的中部转动连接,第三转动杆12的一端通过固定座13与支撑架7的顶端转动连接,且两组第三转动杆12的另一端之间转动设置有转轴14,转轴14的中部外侧套设有滚筒15,滚筒15的外壁与第二护具3的外壁相贴合,其中一组第一转动杆9的中部固定连接设置有限位棘轮16,限位棘轮16的下方竖直设置有限位组件17,限位组件17与支撑柱8的侧面固定连接,电控箱1的顶端一侧依次设置有数字显示屏18、开关按钮19及电流调节旋钮20,电控箱1的侧面连接设置有电源线21。
27.借助于上述技术方案,本发明通过设置支撑组件10,可以实现对第一转动杆9进行支撑,第一转动杆9将支撑力分别通过第二转动杆11及第三转动杆12传送至转轴14上,从而利用滚筒15对第二护具3进行支撑,其中支撑组件10的支撑力可调,从而实现患者对手臂进行主动锻炼,进而加快康复时间;通过设置限位棘轮16及限位组件17,可以实现第二护具3在纵向平面上的单向转动,从而保证在患者手臂不施力时,第二护具3仍具有稳定的支撑力,从而防止对患者的手臂造成二次伤害。
28.在一个实施例中,如图3所示,电控箱1的内部固定设置有plc控制芯片22,电控箱1的内部并位于第一护具2的正下方螺旋设置有加热丝23,且电控箱1的两侧均开设有散热孔24,从而可以对患者手臂进行加热,这样不仅保证患者的舒适性,而且还可以加快患者手臂的血液循环,有助于康复训练。
29.在一个实施例中,如图4-5所示,对于上述调节组件4包括水平套设于第一护具2一侧底部的蜗杆401,蜗杆401的中部套设有转动架402,转动架402的中部内侧转动设置有与蜗杆401相啮合的蜗轮403,蜗轮403的两端通过连接杆404转动设置有支撑座405,支撑座405的顶端与第二护具3的外壁固定连接,且蜗杆401的端部均套设有转轮406。
30.调节组件4的工作原理为:转动蜗杆401,蜗杆401带动蜗轮403转动,蜗轮403通过连接杆404带动支撑座405转动,从而支撑座405带动第二护具3在滚筒15上转动一定角度。
31.在一个实施例中,如图6-7所示,对于上述支撑组件10包括与支撑架7顶端固定连接的套筒1001,套筒1001的内部从下至上依次设置有第一铁芯1002、第一压缩弹簧1003、第二铁芯1004及活塞1005(套筒1001及第一压缩弹簧1003均为非金属材质),且套筒1001的顶端设置有封盖1006;活塞1005的顶端固定设置有t形块1007,t形块1007的外侧套设有滑块1008,滑块1008的顶端与第一转动杆9的一端转动连接,第一铁芯1002及第二铁芯1004的外侧均缠绕设置有线圈1009(第一铁芯1002与第二铁芯1004上线圈1009的缠绕方向相同),且第一铁芯1002与套筒1001的内底端固定连接,第二铁芯1004与活塞1005固定连接并滑动设置于套筒1001的内部,滑块1008的底部开设有与t形块1007相配合的槽口,且滑块1008与t形块1007之间为间隙配合。
32.支撑组件10的工作原理为:线圈1009通电后第一铁芯1002及第二铁芯1004分别带有磁性并相互吸引,此时第二铁芯1004带动活塞1005向下移动,活塞1005为滑块1008提供支撑力。
33.在一个实施例中,如图8-10所示,对于上述限位组件17包括与第一转动杆9中部固定连接的壳体1701,壳体1701的内部从下至上依次设置有第二压缩弹簧1702及伸缩块1703,且壳体1701的底端设置有挡块1704;伸缩块1703的中部开设有梯形槽口1705,梯形槽口1705的内部穿插设置有按压块1706,按压块1706的一端旋接设置有限位螺丝1707(限位螺丝1707可防止按压块1706脱落),梯形槽口1705及按压块1706的截面均为梯形结构,且按
压块1706与伸缩块1703垂直;伸缩块1703的顶端设置有斜切面结构,且斜切面朝向远离电控箱1的方向。
34.限位组件17的工作原理为:推动按压块1706,由于按压块1706特殊的切面结构带动伸缩块1703下移,从而解除对限位棘轮16的限位,松开按压块1706,伸缩块1703在第二压缩弹簧1702的作用下复位,并对限位棘轮16再次限位。
35.为了方便理解本发明的上述技术方案,以下就本发明在实际过程中的工作原理或者操作方式进行详细说明。
36.在实际应用时,线圈1009、显示屏18、开关按钮19、电流调节旋钮20、电源线21及加热丝23分别与plc控制芯片22电连接,利用电源线21对设备进行供电,患者将手臂放入第一护具2及第二护具3上,并利用绑带6将手臂进行固定,按下开关按钮19为线圈1009通电,线圈1009通电后第一铁芯1002及第二铁芯1004分别带有磁性并相互吸引,此时第二铁芯1004带动活塞1005向下移动,活塞1005通过滑块1008带动第一转动杆9逆时针转动,第一转动杆9带动第二转动杆11上移,第二转动杆11带动第三转动杆12顺时针转动,从而第三转动杆12带动转轴14及第二护具3进行顺时针转动,进而带动手臂上升;其中,电流调节旋钮20可以对线圈1009的电流大小进行调节,从而使转轴14具有不同的支撑力(显示屏18可显示实时支撑力的大小),通过调节不同的支撑力,可以保证患者施加很小的力即可将手臂抬起,另外限位组件17可防止第二护具3下落;当患者手臂转动至最大角度后,推动按压块1706,由于按压块1706特殊的切面结构带动伸缩块1703下移,从而解除对限位棘轮16的限位,松开按压块1706,伸缩块1703在第二压缩弹簧1702的作用下复位,并对限位棘轮16再次限位;转动蜗杆401,蜗杆401带动蜗轮403转动,蜗轮403通过连接杆404带动支撑座405转动,从而支撑座405带动第二护具3在滚筒15上转动一定角度。
37.综上所述,借助于本发明的上述技术方案,本发明通过设置支撑组件10,可以实现对第一转动杆9进行支撑,第一转动杆9将支撑力分别通过第二转动杆11及第三转动杆12传送至转轴14上,从而利用滚筒15对第二护具3进行支撑,其中支撑组件10的支撑力可调,从而实现患者对手臂进行主动锻炼,进而加快康复时间;通过设置通电后相互吸引的第一铁芯1002及第二铁芯1004,可以实现通过转动电流调节旋钮20对患者手臂提供大小可调的支撑力,其中第一压缩弹簧1003可以实现第二护具3的复位,从而达到更好且更有效的训练效果;本发明通过设置调节组件4,不仅可以对第二护具3进行支撑,而且还可以对第二护具3的横向方向进行调节,从而实现患者手臂的多角度转动,克服了现有训练装置只能实现单一平面转动的缺陷;通过设置限位棘轮16及限位组件17,可以实现第二护具3在纵向平面上的单向转动,从而保证在患者手臂不施力时,第二护具3仍具有稳定的支撑力,从而防止对患者的手臂造成二次伤害;本发明通过在第一护具2及第二护具3上设置按摩球5,可以保证对患者手臂进行挤压,从而增加训练装置按摩功能,其中第一护具2下方的加热丝23可以对患者手臂进行加热,这样不仅保证患者的舒适性,而且还可以加快患者手臂的血液循环,有助于康复训练。
38.在本发明中,除非另有明确的规定和限定,术语“安装”、“设置”、“连接”、“固定”、“旋接”等术语应做广义理解,例如,可以是固定连接,也可以是可拆卸连接,或成一体;可以是机械连接,也可以是电连接;可以是直接相连,也可以通过中间媒介间接相连,可以是两
个元件内部的连通或两个元件的相互作用关系,除非另有明确的限定,对于本领域的普通技术人员而言,可以根据具体情况理解上述术语在本发明中的具体含义。
39.以上所述仅为本发明的较佳实施例而已,并不用以限制本发明,凡在本发明的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本发明的保护范围之内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。