一种ct扫描的智能化换样系统
技术领域
1.本发明涉及x射线ct无损检测技术,具体公开了一种ct扫描的智能化换样系统。
背景技术:
2.x射线ct成像作为一种先进的三维无损检测技术,能够在不破坏材料结构的情况下呈现出其内部结构,已经广泛应用于众多行业,如工业制造、材料科学、生物医学、考古研究等领域。锥形束ct工作站凭借其扫描视场大、扫描时间短、光束利用率高等优势在无损检测行业中扮演重要角色,同时也存在诸多改进空间。当检测样品较多,需要频繁开关x射线源和屏蔽箱进行换样操作,会影响样品批量检测效率,并增加了检测人员频繁暴露在电离辐射环境中的风险。
3.传统ct扫描装置在完成对样品扫描后,一般需要人工将已测样品从样品台上取下,然后换上待测样品,为了避免检测人员频繁接触x射线所引起的电离辐射,在换样期间需要暂时关闭射线源,打开屏蔽箱门,换好样品之后,再重新启动门锁并打开射线源。当待测样品过多时,这种换样方式就显得复杂繁琐且效率不高,还增加了检测人员接触空气电离的风险。
4.尤其大批量的同属性检测样品,其实验参数固定,频繁地开关系统会增加了实验误差可能性,不仅增加人员安全风险,还会影响设备使用寿命,这对ct扫描换样的智能化控制提出新的要求。
5.传统ct数据采集由实验参数设定、多轴运动控制、射线源控制、图像采集控制等多个子系统联动完成,缺乏对样品更换环节控制的考虑,控制系统之间布局较为分散,增加了操作复杂性和实验不确定性,需要发展ct数据采集全周期控制系统。
技术实现要素:
6.针对上述现有技术平台中存在的不足和新需求,本发明的目的在于提供一种ct扫描的智能化换样系统,开发了ct数据采集的全周期控制软件,提高了ct工作站检测效率,同时避免了检测人员频繁接触电离辐射风险。
7.为了达到上述目的,本发明的技术方案如下。
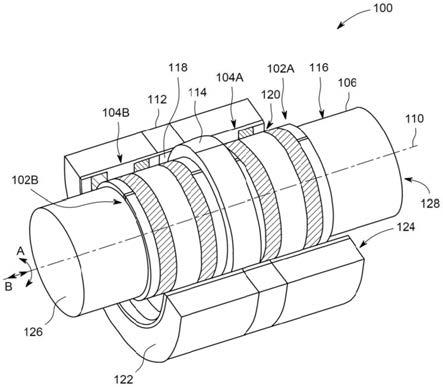
8.一种ct扫描的智能化换样系统,该系统放置在x射线屏蔽箱内部,包括样品支架、托盘、机械手、机械臂、换样控制模块,参见图1所示。
9.样品支架上部用于放置待测样品,其底部具有吸合设计,可与托盘、样品台基座相吸合,中部卡槽用于与机械手卡钳咬合,参见图2所示。
10.托盘用于放置样品支架,并设有多个支架位,每个支架位可放置一个样品支架,可与其底部相吸合。
11.机械手固定在机械臂上,用于咬合样品支架。
12.机械臂与机械手相连,通过执行升、转、落操作,完成样品转移动作。
13.换样系统控制模块用于驱动和控制机械臂的各种启停、旋转、位移操作,设定换样
操作固定化控制程序,实现自动化换样任务。
14.ct扫描的智能化换样控制系统,集成了上述各子系统的信号通讯,实现了软件化智能控制,具体包括以下步骤。
15.步骤(1),查看硬件是否连接正常,开启控制软件。
16.步骤(2),检查机械手、托盘、样品台的初始化位置。
17.步骤(3),输入待测样品数。
18.步骤(4),运行机械手将待测样品放置到样品台。
19.步骤(5),机械手归0
#
位。
20.步骤(6),进行ct扫描实验任务直到结束。
21.步骤(7),运行机械手将2
#
已测样品放置到1
#
位。
22.步骤(8),检查当前托盘样品数量,如果实验样品已经扫描完毕则机械手归0
#
位,否则转至步骤(4)继续运行。
23.步骤(9),换样任务结束。
附图说明
24.为了更清楚地说明本发明实施例的技术方案,下面对实施例描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本发明的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其它的附图。
25.图1是本发明所公开的一种ct扫描的智能化换样系统结构示意图。
26.图2是本发明所公开的一种ct扫描的智能化换样支架、托盘、机械手示意图。
27.图3是本发明所公开的一种ct扫描的智能化换样系统的控制流程图。
28.图4是本发明所公开的一种ct扫描的智能化换样系统的控制软件界面。
具体实施方式
29.下面结合附图,给出本发明的较佳实施例,并予以详细描述,使能更好地理解本发明的功能、特点,并不用于限定本发明。
30.实施例1。
31.一种ct扫描的智能化换样系统,置于x射线屏蔽箱中ct扫描平台上完成自动换样功能,包括样品支架、托盘、机械手、机械臂、换样系统控制模块及其附件。
32.样品支架上部承载样品,底部有3颗钢珠和3个磁饼,可以准确的将其固定在样品台上面,样品支架中心腰部向内凹陷,其规格与机械手的卡钳相吻合,在换样操作时,机械手卡钳卡住样品支架进行移动。
33.托盘内含有多个支架位,每个支架位内部含有钢珠凹槽和磁饼,用于与样品支架底部相连,对样品起到固定作用,在换样操作时,机械手将扫描完的样品放到托盘内,然后再从中抓取一个待测样品进行扫描。
34.机械手主要由一个卡钳组成,连接在机械臂的一端,卡钳的规格大小与样品支架的凹槽相匹配,在换样操作时,机械手在机械臂的驱动下进行旋转、升降等位移操作,从而将样品移动到指定位置。
35.机械臂一端与机械手相连,另一端固定在光学平台上面,机械臂上有3个机械关节,可以进行升降、伸缩动作,完成取样、归位等动作。
36.换样系统控制模块负责驱动和控制整个换样过程,它能够控制机械臂、机械手的各种位移动作,在完成一次换样任务之后,控制机械手回到初始位置,等待下一次换样任务。
37.一种ct扫描的智能化换样控制流程,参见图3所示,实现了实验样品的自动化更换,具体包括以下步骤。
38.步骤(1),查看系统硬件是否完备且连接正常。
39.步骤(2),初始化状态检查。
40.步骤(3),输入待测样品数。
41.步骤(4),启动放样品操作,机械手在1
#
位顺序夹取待测样品支架,通过执行升、转、落操作,将样品放置在2
#
位。
42.步骤(5),机械手回到0
#
位。
43.步骤(6),等待该样品扫描结束。
44.步骤(7),启动取样品操作,机械手顺序在2
#
位夹取测后样品支架,通过执行升、转、落操作,顺序将其放回1
#
位。
45.步骤(8),顺序执行样品转移操作,直至所有样品扫描完毕。
46.步骤(9),机械手归0
#
位。
47.步骤(10),实验任务结束。
48.进一步的,所述步骤(2)包括以下步骤。
49.步骤(21),检查机械手在0
#
位就绪。
50.步骤(22),检查托盘在1
#
位就绪。
51.步骤(23),检查样品台在2
#
位就绪。
52.进一步的,所述步骤(2)包括以下步骤。
53.步骤(81),未完成所有样品扫描,循环执行步骤(4)至步骤(7)。
54.步骤(82),已完成所有样品扫描,实行步骤(9)。
55.实施例2。
56.一种ct扫描的智能化换样系统控制软件(x-ray tomo),参见图4所示,实现了ct数据采集和智能化换样功能,具体包括以下步骤。
57.步骤(1),初始化检查并开启控制软件。
58.步骤(2),在软件换样控制模块中"sample num"编辑框中输入待测样品数n。
59.步骤(3),启动放样品操作,点击"place sample"。
60.步骤(4),点击"robotic arm 0"将机械手归0
#
位。
61.步骤(5),在预览模式选择模块中打开"live"模式,根据投影图显示和直方图显示调整射线源模块、多维运动控制模块及曝光时间使二维投影图像满足实验要求。
62.步骤(6),进入"fdk"扫描模块进行相关参数设定。
63.步骤(7),点击"run"进行等角度间隔扫描至ct扫描进度条结束。
64.步骤(8),关闭射线源,进行"dark"图像拍摄。
65.步骤(9),启动取样品操作,点击"remove sample"。
66.步骤(10),赋值n=n-1,顺序执行样品转移操作,直至所有样品扫描完毕。
67.步骤(11),点击"robotic arm 0"将机械手归0
#
位。
68.步骤(12),实验任务结束。
69.该软件界面设计与功能布局同样属于本发明的保护范围,其实施过程与实施例1中控制流程相同部分,在此不再赘述。
70.以上所述的仅是本发明的优选实施方式,应当指出,对于本领域的普通技术人员来说,在不脱离本发明创造构思的前提下,还可以做出若干变形和改进,这些都属于本发明的保护范围。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。