1.本发明涉及扬尘检测的技术领域,特别涉及一种基于北斗系统的扬尘监测系统。
背景技术:
2.随着社会的发展,城市化进程的大力推进,城市扬尘也成了pm2.5的重要来源之一。科技的发展带动经济的提高,城市到处可见城市整改,如修路、建公用设备,或建高楼大厦,空气质量日趋变差,扬尘随处可见。而城市中的扬尘以建筑工地的扬尘为重中之重。目前,工地扬尘中的重要污染物大都有总悬浮颗粒物、pm10以及pm2.5组成,尤其是pm10以及pm2.5的人体能够吸入体内的颗粒物,对人体的健康产生严重的影响。
3.现有技术中也对扬尘监测有做出了一定的研究,如公开号cn108760594a专利名称实时扬尘监测系统、公开号cn205317256u专利名称一种基于自组网的扬尘监测系统、公开号cn206696144u专利名称扬尘监测及自动降尘系统。但是这些扬尘监测系统中,一般检测范围小,检测效率低,或是不能够精确的检测出空气中的扬尘系数,以及不能够对检测后的数据进行有效的应对。
4.公开号cn213032120u,专利名称一种扬尘检测喷淋系统,包括一对立柱,一对立柱之间设有横梁,横梁上架设有喷淋系统,横梁上还设有扬尘检测器;喷淋系统包括固定于其中一个立柱上的数值水管和固定于横梁上的水平水管,竖直水管与所述水平水管相通,水平水管上设有多个喷头,竖直水管上设有球阀。该喷淋系统通过观察扬尘监测器上的数值来控制球阀开启的大小,从而控制喷淋系统中水流量的大小。
5.然而虽然有对扬尘进行监测的系统由于通过监测系统的监测而做出相应对策的喷淋系统,但是其监测的准确度不够,检测范围有限以及检测后不能有效的对检测的数据进行做出判断,有效降低空气中的扬尘。
技术实现要素:
6.本发明的目的在于克服上述现有技术的不足,提供一种基于北斗系统的扬尘监测系统,集扬尘监测、喷淋于一体,准确高效的降低空气中的扬尘颗粒,且便于实时查看。
7.为实现上述目的,本发明提出了一种基于北斗系统的扬尘监测系统,包括云服务平台,北斗通信模块,多个数据采集模块,每个所述数据采集模块通过北斗通信模块与云服务平台连接,所述数据采集模块包括信息处理单元、北斗定位信息接收模块、多组传感器模块、报警模块和喷射控制单元;各组传感器模块呈三角形矩阵分布放置于被监测的区域中,用于采集不同位置的空气质量信息并将该信息传送至信息处理单元,在传感器模块处还设置有报警模块,用于在对应位置处的传感器模块采集到异常数据时通过信息处理单元控制其发出报警信号,所述北斗定位信息接收模块与报警模块连接,用于接收报警模块的位置信息,并将该位置信息传送至信息处理单元,信息处理单元根据接收到的位置信息控制对应处的喷射控制单元的工作。
8.本发明的创新点在于:通过利用北斗通信模块,结合云服务平台、传感器模块、报
警模块和喷射控制单元,能够实时监控各个区域的扬尘监测情况,并做出相应的报警和喷射对策,相应及时;各个传感器以三角形矩阵分布在被监测区域中,与信息处理单元、报警模块向结合,保证了监测能够更加可靠,监测数据更加准确。
9.作为优选,所述传感器模块为pm2.5颗粒物传感器、pm10颗粒物传感器、tsp扬尘传感器中的两种或三种,且多个所述传感器呈阵列分布,其数据由信息处理单元统一处理,以综合判别空气含尘度;多种传感器同时对空气进行监测,弥补各自传感器之间的缺陷,提高空气扬尘的准确性。
10.作为优选,所述数据采集模块还包括遥感影像单元,所述遥感影像单元设置在传感器模块处,所述遥感影像单元与信息处理单元连接,信息处理单元将遥感影像单元所拍摄的影像和对应处的传感器模块采集到的数据做对比,并控制信息处理单元作出是否报警的动作,实现数据分析和信号报警的双重功能,具备更高的抗误报能力。
11.作为优选,每个所述传感器模块、报警模块和遥感影像单元均通过地址编码的形式记录于信息处理单元中;用于信息处理单元识别传感器模块、遥感影像模块的对应位置,并可通过寻址向某一报警模块发出报警信号。
12.作为优选,所述喷射控制单元包括喷射装置,所述喷射装置包括平台、喷射管和喷射头,所述喷射管竖直安装在平台上,所述喷射管的进水端与吸水泵的水管连接,所述喷射管的出水端通过连接部分与喷射头垂直连接,所述射喷头包括进水管、雾化部分和水柱部分,所述进水管与喷射管的出水端连接,所述进水管的下侧设置有多个雾化部分,所述雾化部分上设置有电磁阀一,所述进水管远离喷射管的一端与水柱部分连接,所述水柱部分上设置有电磁阀二,所述电磁阀一、电磁阀二、吸水泵分别与信息处理单元连接;通过设置喷射装置,喷射装置设有雾化部分和水柱部分,在水柱部分上设置电磁阀一,在水雾部分设置电磁阀二,电磁阀一、电磁阀二和吸水泵分别与信息处理单元连接,实现对目标区域的实时监测的同时,根据监测情况做出水柱和水雾之间的自由切换,既可以近距离水雾覆盖,又可以远距离水柱喷射。
13.作为优选,所述雾化部分在内径轴向方向上设有多个凹槽,所述凹槽的方向与喷射管的径向方向一致,相邻两个所述凹槽之间设置有凸台。
14.作为优选,所述喷射装置还设有防外溅部分,所述防外溅部分设置为喇叭状腔体,所述水柱部分置于喇叭状腔体内。
15.作为优选,所述平台上设置有旋转装置,所述旋转装置包括旋转电机和旋转支架,所述旋转支架设有内腔,所述内腔中心设有中空,所示中空内设有齿轮,所述旋转电机通过齿盘与齿轮连接,所述传感器模块、报警模块均安装在旋转支架的表面;实现了旋转装置360度的自由旋转,进一步扩大了检测视野,提高了实用性和检测的准确度,适用范围广,实用性强。
16.作为优选,所述传感器模块还包括风向传感器和风速传感器,所述风向传感器和风速传感器置于平台的上端部,所述喷射管与喷射头的连接部分设置为万向旋转接头,所述风向传感器、风速传感器和万向旋转接头分别与信息处理单元连接;通过风向传感器、风速传感器的实时气象监测,信息处理单元控制喷射头及时旋转至合适角度进行喷淋作业。
17.本发明的有益效果:(1)通过设置数据采集模块,数据采集模块包括信息处理单元、北斗定位信息接收模块、传感器模块、报警模块、遥感影像单元和喷射控制单元,实现了
对目标区域的实时监测并及时做出响应;(2)遥感影像单元与云服务平台连接,可以清晰的查看目标区域的状况,如工地裸露、垃圾以及工地人员设备工作情况,使监管人员能够更全面、高效、科学的精准掌握各个目标区域的情况,实现全方位、立体式、无死角覆盖,弥补人工巡查工作量大、周期长、取证难以及不易发现的盲点问题;(3)喷射装置通过信息处理单元的控制进行实时响应,既可以近距离水雾覆盖,又可以远距离水柱喷射。
18.本发明的特征及优点将通过实施例结合附图进行详细说明。
附图说明
19.图1是本发明的系统组成框图。
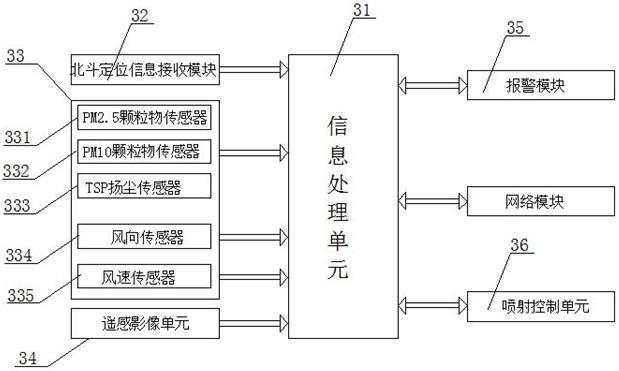
20.图2是数据采集模块的组成框图。
21.图3是喷射装置的结构示意图。
22.图4是雾化部分的截面图。
23.图5是旋转装置的爆炸结构示意图。
24.图中:1-云服务平台、2-北斗通信模块、3-数据采集模块、4-平台、5-喷射管、6-喷射头、7-吸水泵、8-万向旋转接头、9-蓄水池、31-信息处理单元、32-北斗定位信息接收模块、33-传感器模块、34-遥感影像单元、35-报警模块、36-喷射控制单元、41-旋转装置、61-进水管、62-雾化部分、63-水柱部分、64-防外溅部分、331-pm2.5颗粒物传感器、332-pm10颗粒物传感器、333-tsp扬尘传感器、334-风向传感器、335-风速传感器、411-旋转电机、412-旋转支架、413-齿轮、414-齿盘、621-电磁阀一、622-凹槽、623-凸台、631-电磁阀二。
具体实施方式
25.为使本发明的目的、技术方案和优点更加清楚明了,下面通过附图及实施例,对本发明进行进一步详细说明。但是应该理解,此处所描述的具体实施例仅仅用以解释本发明,并不用于限制本发明的范围。此外,在以下说明中,省略了对公知结构和技术的描述,以避免不必要地混淆本发明的概念。
26.如图1至图5所示,本实施例提出了一种基于北斗系统的扬尘监测系统,包括云服务平台1、北斗通信模块2和多个数据采集模块3,每个目标监测区域设置一个数据采集模块3,采集模块通过北斗通信模块2与云服务平台1连接,云服务平台1可以为pc端、手机端或平板端等,用于实时查看目标区域的实际状况;数据采集模块3包括信息处理单元31、北斗定位信息接收模块32、多组传感器模块33、遥感影像单元34、报警模块35和喷射控制单元36;各组传感器模块33呈三角形矩阵分布放置于被监测的区域中,用于采集不同位置的空气质量信息并将该信息传送至信息处理单元31;具体的,传感器模块33为pm2.5颗粒物传感器331、pm10颗粒物传感器332、tsp扬尘传感器333中的两种或三种,其数据由信息处理单元31统一处理,综合判别空气含尘度;遥感影像单元34设置在传感器模块33处,与信息处理单元31连接,采用超高分辨率的遥感影像对目标区域实时拍摄并传送至信息处理单元31,信息处理单元31根据传感器模块33和遥感影像单元34传送的信息进行识别、分析后作出响应,若传感器模块33传送的数据信息结果与遥感影像单元34传送的信息结果一致,超出预设值,则信息处理单元31控
制报警模块35发出报警信号,并控制喷射单元进行喷淋作业,若未超出预设值,则保持现有状态,若传感器模块33传送的数据信息结果与遥感影像单元34传送的信息结果不一致,则传感器模块33或遥感影像单元34需进行重新监测,以保持监测结果的一致性;具体的,传感器模块33、报警模块35和遥感影像单元34均通过地址编码的形式与北斗定位信息接收模块32连接,并将该信息记录于信息处理单元31中,信息处理单元31根据接收到的位置信息控制对应处的喷射控制单元36的工作。
27.喷射控制单元36包括喷射装置,喷射装置包括平台4、喷射管5和喷射头6,喷射管5竖直安装在平台4上,喷射管5的进水端与吸水泵7的水管连接,喷射管5的出水端通过连接部分与喷射头6垂直连接,喷射头6包括进水管61、雾化部分62和水柱部分63,进水管61与喷射管5的出水端连接,进水管61的下侧设置有多个雾化部分62,雾化部分62上设置有电磁阀一621,进水管61远离喷射管5的一端与水柱部分63连接,水柱部分63上设置有电磁阀二631,电磁阀一621、电磁阀二631、吸水泵7分别与信息处理单元31连接,及时作出喷淋动作,喷射距离大,覆盖面积>50米,本发明喷射装置中采用的吸水泵7为强力吸水泵,大喷雾角≥90度,水平回转角为360度,无线遥控半径≥150,喷射管5材采用80不锈钢,平台41高度达到2500mm;将扬尘污染按严重程度分为一级和二级,若信息处理单元31接收到的信号为一级污染,则信息处理单元31控制吸水泵7、电磁阀一621打开,进行雾化作业,若接收到的信号为二级污染,则信息处理单元31控制吸水泵7、电磁阀一621、电磁阀二631打开,进行水雾、水柱的联合喷射,快速降低目标区域污染程度。
28.作为优选的实施例,雾化部分62在内径轴向方向上设有多个凹槽622,所述凹槽622的方向与喷射管5的径向方向一致,相邻两个所述凹槽622之间设置有凸台623。
29.作为优选的实施例,喷射装置还设有防外溅部分64,防外溅部分64设置为喇叭状腔体,水柱部分63置于喇叭状腔体内,防止水柱部分63的飞溅。
30.作为优选的实施例,喷射装置的平台4上设置有旋转装置41,旋转装置41包括旋转电机411和旋转支架412,旋转支架412设有内腔,内腔中心设有中空,中空内设有齿轮413,旋转电机411通过齿盘414与齿轮413连接,传感器模块33、报警模块35均安装在旋转支架412的表面;可以360度的全方位的进行空气扬尘质量监测,扩大了检测视野,提高了实用性和检测的准确度,适用范围广,实用性强;本发明中的旋转电机411选用步进电机。
31.作为优选的实施例,传感器模块33还包括风向传感器334和风速传感器335,风向传感器334和风速传感器335置于平台4的上端部,喷射管5与喷射头6的连接部分设置为万向旋转接头8,风向传感器334、风速传感器335和万向旋转接头8分别与信息处理单元31连接,根据风向传感器334和风速传感器335监测到的气象信息传送至信息处理单元31,信息处理单元31控制万向旋转接头8旋转至合适角度,以适应风向进行水柱作业。
32.本发明一种基于北斗系统的扬尘监测系统的工作过程,各个传感器模块33和遥感影像单元34对目标区域进行实时监测和拍摄并将相关信息传送至信息处理单元31,信息处理单元31进行对比分析后作出是否控制报警模块35报警的动作,若分析后的结果为空气扬尘质量超过预设值,则控制喷射装置工作,同时遥感影像单元34将拍摄到的影响通过信息处理单元31、北斗通信模块2传送至云服务平台1,用户可以通过pc端、手机端或平板端进行实时查看。
33.以上所述仅为本发明的较佳实施例而已,并不用以限制本发明,凡在本发明的精
神和原则之内所作的任何修改、等同替换或改进等,均应包含在本发明的保护范围之内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。
