技术特征:
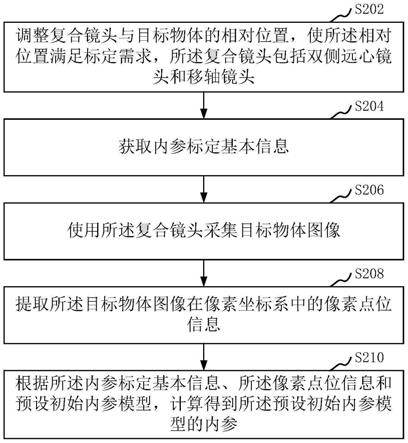
1.一种复合镜头内参标定方法,其特征在于,所述方法包括:调整复合镜头与目标物体的相对位置,使所述相对位置满足标定需求,所述复合镜头包括双侧远心镜头和移轴镜头;获取内参标定基本信息;使用所述复合镜头采集目标物体图像;提取所述目标物体图像在像素坐标系中的像素点位信息;根据所述内参标定基本信息、所述像素点位信息和预设初始内参模型,计算得到所述预设初始内参模型的内参。2.根据权利要求1所述的方法,其特征在于,所述预设初始内参模型包括下述预设初始内参矩阵:其中,k
x
表示内参矩阵,m表示镜头倍率,c
τ
表示cosτ,c
ρ
表示cosρ,s
τ
表示sinτ,s
ρ
表示sinρ,τ表示移轴镜头倾斜角,ρ表示移轴镜头旋转角,s
x
表示感光芯片的像素在x方向的间距,s
y
表示感光芯片的像素在y方向的间距。3.根据权利要求1所述的方法,其特征在于,当τ=0
°
,ρ=90
°
时,所述预设初始内参模型包括下述内参矩阵:其中,k
x
表示内参矩阵,m表示镜头倍率,s
x
表示感光芯片的像素在x方向的间距,s
y
表示感光芯片的像素在y方向的间距。4.根据权利要求1所述的方法,其特征在于,所述调整复合镜头与目标物体的相对位置包括:将所述目标物体调整至所述复合镜头的视野中心。5.根据权利要求1所述的方法,其特征在于,所述调整复合镜头与目标物体的相对位置包括:所述目标物体为十字校准板,运行实时校准程序,调整复合镜头视野的十字校准中心与所述十字校准板的中心对齐。6.根据权利要求1所述的方法,其特征在于,所述根据所述内参标定基本信息、所述像素点位信息和预设初始内参模型,计算得到所述预设初始内参模型的内参包括确定复合镜头的投影矩阵,所述复合镜头的投影矩阵表示如下:
其中,w矩阵表示世界坐标系到相机坐标系的变换矩阵,即复合镜头的外参矩阵,p0矩阵表示相机坐标系到未倾斜图像坐标系的变换矩阵,h0矩阵表示未倾斜图像坐标系到倾斜图像坐标系的变换矩阵,k表示倾斜图像坐标系到像素坐标系的变换矩阵,r表示相机坐标系与世界坐标系的旋转矩阵,t表示相机坐标系与世界坐标系的平移矩阵。7.一种复合镜头内参标定装置,其特征在于,所述装置包括:位置调整模块,用于调整复合镜头与目标物体的相对位置,使所述相对位置满足标定需求,所述复合镜头包括双侧远心镜头和移轴镜头;第一信息获取模块,用于获取内参标定基本信息;图像采集模块,用于使用所述复合镜头采集目标物体图像;第二信息获取模块,用于提取所述目标物体图像在像素坐标系中的像素点位信息;计算模块,用于根据所述内参标定基本信息、所述像素点位信息和预设初始内参模型,计算得到所述初始内参模型的内参。8.根据权利要求7所述的装置,其特征在于,所述计算模块使用的预设初始内参模型包括下述预设初始内参矩阵:其中,k
x
表示内参矩阵,m表示镜头倍率,c
τ
表示cosτ,c
ρ
表示cosρ,s
τ
表示sinτ,s
ρ
表示sinρ,τ表示移轴镜头倾斜角,ρ表示移轴镜头旋转角,s
x
表示感光芯片的像素在x方向的间距,s
y
表示感光芯片的像素在y方向的间距。9.一种相机,所述相机的镜头包括复合镜头,其特征在于,所述复合镜头在被标定时实现权利要求1至6中任一项所述的方法的步骤。10.一种三目光学系统,所述光学系统包括左相机、中相机和右相机,所述左相机和所述中相机的视野重合超过80%,所述中相机和所述右相机的视野重合超过80%,所述左相机、所述中相机和所述右相机在进行镜头内参标定时均实现权利要求1至6中任一项所述的方法的步骤。
技术总结
本公开涉及一种复合镜头内参标定方法、装置、计算机设备、存储介质和计算机程序产品。所述方法包括:调整复合镜头与目标物体的相对位置,使所述相对位置满足标定需求,所述复合镜头包括双侧远心镜头和移轴镜头;获取内参标定基本信息;使用所述复合镜头采集目标物体图像;提取所述目标物体图像在像素坐标系中的像素点位信息;根据所述内参标定基本信息、所述像素点位信息和预设初始内参模型,计算得到所述预设初始内参模型的内参。采用本方法能够实现由双侧远心镜头和移轴镜头构成的复合镜头的内参标定。的内参标定。的内参标定。
技术研发人员:刘梦茹 熊星
受保护的技术使用者:苏州华兴源创科技股份有限公司
技术研发日:2022.02.28
技术公布日:2022/5/30
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。