1.本发明涉及神经网络技术领域,具体涉及基于人工智能的液压设备智能控制系统。
背景技术:
2.人工神经网络(artificial neural networks,简写为anns)也简称为神经网络(nns)或称作连接模型(connection model),它是一种模仿动物神经网络行为特征,进行分布式并行信息处理的算法数学模型。这种网络依靠系统的复杂程度,通过调整内部大量节点之间相互连接的关系,从而达到处理信息的目的。
3.现今在液压控制系统中采用神经网络模型进行参数调整或系统状态的估计已经形成常态,但神经网络存在较大的不可解释性,在进行系统状态估计的过程中,神经网络预测结果的可信度是一个不确定因素,因而不能判断神经网络的输出结果是否准确,进一步导致液压设备的智能控制没有准确的依据,控制过程不合理。
技术实现要素:
4.为了解决上述技术问题,本发明的目的在于提供一种基于人工智能的液压设备智能控制系统,所采用的技术方案具体如下:
5.本发明一个实施例提供了一种基于人工智能的液压设备智能控制系统,该系统包括以下模块:
6.神经网络训练模块,用于获取液压缸每个时刻下的压力数据,利用多个预设时间段的压力数据序列以及对应的泄露状态训练状态判断神经网络;通过每个压力数据对应的系统误差计算该压力数据对应的置信度,利用不同状态下的所述压力数据及其对应的置信度分别训练置信度神经网络;
7.神经网络应用模块,用于将采集的压力数据输入训练完成的状态判断神经网络,输出对应的状态,然后将该压力数据输入训练完成的对应状态的置信度神经网络中,输出对应的置信度;
8.可信度获取模块,用于获取当前时刻前预设时间段的置信度序列,筛选出大于置信度阈值的置信度的数量占比;同时分析所述置信度序列的变化趋势,根据变化趋势和所述数量占比获取数据可靠性;通过将筛选前后的所述置信度序列转换为压力数据范围分别输入状态判断神经网络,根据前后两次的输出结果得到可靠性系数,基于所述数据可靠性和所述可靠性系数获取状态判断神经网络的可信度;
9.智能控制模块,用于根据状态判断神经网络的结果和对应的可信度评估液压设备智能控制系统的稳定性,以基于所述稳定性对液压设备进行智能控制。
10.优选的,所述神经网络训练模块包括:
11.置信度计算单元,用于获取每个压力数据对应的液压缸中阀芯的理论位移,以及液压缸的实际位移,以所述理论位移与实际位移的差值作为所述系统误差,依据所述系统
误差与理论位移的比值获取所述置信度;所述置信度与所述系统误差呈负相关关系。
12.优选的,所述神经网络训练模块包括:
13.置信度神经网络训练单元,用于通过状态判断神经网络获取压力数据序列的状态,并根据不同的状态将压力数据序列区分为不同的组,分别利用每组的压力数据和对应的置信度训练该组状态下的置信度神经网络。
14.优选的,所述可信度获取模块包括:
15.数量占比获取单元,用于通过对置信度序列进行阈值分割获取所述置信度阈值,筛选出置信度序列中大于置信度阈值的置信度数量,以其与置信度序列的所有元素的数量的比值作为所述数量占比。
16.优选的,所述可信度获取模块包括:
17.变化趋势分析单元,用于以时刻为横坐标,以每个时刻下压力数据对应的置信度为纵坐标建立坐标系,获取置信度序列在该坐标系中的坐标点,并获取这些坐标点的主成分方向向量,根据主成分方向向量的方向判断其增减变化趋势,根据主成分方向向量与水平方向的夹角获取其变化幅度。
18.优选的,所述可信度获取模块包括:
19.数据可靠性获取单元,用于根据所述变化幅度和所述数量占比获取所述数据可靠性;当所述主成分方向向量为增加趋势时,所述变化幅度与所述数据可靠性呈正相关关系;当所述主成分方向向量为减小趋势时,所述变化幅度与所述数据可靠性呈负相关关系。
20.优选的,所述可信度获取模块包括:
21.可信度系数获取单元,用于将所述置信度序列转换为压力数据范围输入所述状态判断神经网络,输出对应的第一状态;将所述置信度序列中不大于置信度阈值的元素置零,得到筛选序列,将其转换为压力数据范围输入所述状态判断神经网络,输出对应的第二状态;根据第一状态与第二状态是否一致获取所述可信度系数。
22.优选的,所述智能控制模块包括:
23.稳定性评估单元,用于当状态判断神经网络的输出结果为正常且可信度大于可信阈值时,该液压设备智能控制系统稳定;否则该液压设备智能控制系统不稳定,需要进行智能调节。
24.本发明实施例至少具有如下有益效果:
25.通过置信度网络的输出结果计算状态判断网络的置信度,进而评估状态判断网络的可信度,利用状态判断网络的判断结果和可信度评估当前液压设备的泄露结果,以对液压设备进行压力调节。本发明实施例能够采用神经网络模型及时对液压设备的泄露状态进行检测,并能够通过智能控制做出相应的预警反应,提高系统的灵敏度,对系统的状态进行更加准确的预测和评估。
附图说明
26.为了更清楚地说明本发明实施例或现有技术中的技术方案和优点,下面将对实施例或现有技术描述中所需要使用的附图作简单的介绍,显而易见地,下面描述中的附图仅仅是本发明的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其它附图。
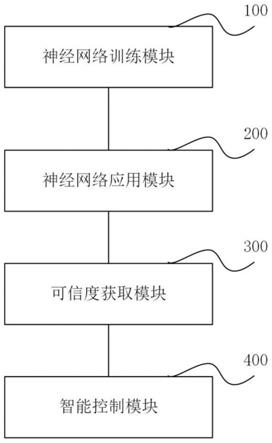
27.图1为本发明一个实施例提供的基于人工智能的液压设备智能控制系统的系统框图;
28.图2为阀控液压缸位置伺服系统原理图。
具体实施方式
29.为了更进一步阐述本发明为达成预定发明目的所采取的技术手段及功效,以下结合附图及较佳实施例,对依据本发明提出的基于人工智能的液压设备智能控制系统,其具体实施方式、结构、特征及其功效,详细说明如下。在下述说明中,不同的“一个实施例”或“另一个实施例”指的不一定是同一实施例。此外,一或多个实施例中的特定特征、结构、或特点可由任何合适形式组合。
30.除非另有定义,本文所使用的所有的技术和科学术语与属于本发明的技术领域的技术人员通常理解的含义相同。
31.下面结合附图具体的说明本发明所提供的基于人工智能的液压设备智能控制系统的具体方案。
32.请参阅图1,其示出了本发明一个实施例提供的基于人工智能的液压设备智能控制系统的系统框图,该系统包括以下模块:
33.神经网络训练模块100、神经网络应用模块200、可信度获取模块300、智能控制模块400。
34.神经网络训练模块100,用于获取液压缸每个时刻下的压力数据,利用多个预设时间段的压力数据序列以及对应的泄露状态训练状态判断神经网络;通过每个压力数据对应的系统误差计算该压力数据对应的置信度,利用不同状态下的压力数据及其对应的置信度分别训练置信度神经网络。
35.具体的,神经网络训练模块100包括压力数据获取单元110、状态判断神经网络训练单元120、置信度计算单元130以及置信度神经网络训练单元140。
36.压力数据获取单元110用于获取液压缸每个时刻下的压力数据。
37.通过安装在液压泵附近的压力传感器获得液压缸内部每个时刻下的压力数据。
38.状态判断神经网络训练单元120用于利用多个预设时间段的压力数据序列以及对应的泄露状态训练状态判断神经网络。
39.在历史数据中,选取多个预设时间段的压力数据序列,同时获取其对应的泄露状态作为标签,对事件性质进行标号,用0和1作为标签数据,0表示没有发生泄露,1表示发生了泄露,通过交叉熵损失函数训练分类网络,得到状态判断神经网络。
40.置信度计算单元130,用于获取每个压力数据对应的液压缸中阀芯的理论位移,以及液压缸的实际位移,以理论位移与实际位移的差值作为系统误差,依据系统误差与理论位移的比值获取置信度;置信度与系统误差呈负相关关系。
41.根据现有技术中阀控液压缸的原理,如图2所示,系统发送指令信号ur后经过控制器以及伺服放大器,产生控制信号用以控制伺服阀阀芯的位移xv,通过伺服阀阀芯的位移进而控制液压缸活塞杆的位移x
p
,活塞杆的位移x
p
通过位移传感器检测后得到位移反馈信号uf,随即与指令信号ur相比较产生偏差ue并代入控制器中对活塞杆位移进行调节。
42.图2来自《基于神经网络的阀控液压缸系统故障诊断_闻中翔》论文,具体见该论文
24页。
43.液压缸在受推力作用下,系统发送的指令信号ur和位移传感器的位移信号uf存在误差,因此往往需要根据指令信号ur对应的理论活塞杆位移xv与活塞杆的实际位移x
p
的差值对活塞杆进行调整,但调整之后仍然存在误差,该误差的大小作为系统误差δ=x
v-x
p
,即活塞杆的理论位移与真实位移的差值。同时内部压力变化和活塞杆的位置呈正相关关系,因此可以通过计算位移误差进而表示压力误差。
44.活塞杆位移值和压力值随泄露量的变化而变化,系统误差δ越大,位移数据可信度越小。通过系统误差与理论位移得到置信度,误差越大,置信度越小,得到压力数据对应置信度的公式如下:
[0045][0046]
其中,s表示置信度,δ表示系统误差,xv表示指令数据对应的活塞杆理论位移。
[0047]
系统误差占比越小,置信度越大,通过反比例函数模拟置信度和系统误差之间的关系。
[0048]
置信度神经网络训练单元140,用于通过状态判断神经网络获取压力数据序列的状态,并根据不同的状态将压力数据序列区分为不同的组,分别利用每组的压力数据和对应的置信度训练该组状态下的置信度神经网络。
[0049]
将历史数据输入训练完成的状态判断神经网络,获取压力数据序列的状态,将发生泄漏的数据和为发生泄漏的数据分别作为一组,各自进行置信度神经网络的训练,训练置信度神经网络时,以每个时刻下的压力数据作为训练集,以其对应的置信度作为标签训练置信度神经网络,损失函数为交叉熵损失函数。最终得到训练完成的未泄露状态的第一置信度神经网络和泄露状态的第二置信度神经网络。
[0050]
神经网络应用模块200,用于将采集的压力数据输入训练完成的状态判断神经网络,输出对应的状态,然后将该压力数据输入训练完成的对应状态的置信度神经网络中,输出对应的置信度。
[0051]
具体的,实时采集压力数据,将当前时刻前预设时间段的压力数据序列作为当前时刻的压力序列,输入训练完成的状态判断神经网络中,得到输出结果。通过状态判断神经网络的输出结果来决定选择哪个置信度神经网络进行数据的置信度计算。如果稳定性神经网络的输出结果为0,说明系统没有发生泄露事件,选择第一置信度神经网络进行置信度的计算;如果稳定性神经网络的输出结果为1,说明发生了泄露事件,选择第二置信度神经网络进行置信度计算。
[0052]
需要说明的是,由于系统误差比理论位移小,得到的置信度的值小于1,因此获取置信度之后,根据置信度最大值对所有获取的置信度进行归一化,将其取值范围调整为[0,1]。
[0053]
可信度获取模块300,用于获取当前时刻前预设时间段的置信度序列,筛选出大于置信度阈值的置信度的数量占比;同时分析置信度序列的变化趋势,根据变化趋势和数量占比获取数据可靠性;通过将筛选前后的置信度序列转换为压力数据范围分别输入状态判断神经网络,根据前后两次的输出结果得到可靠性系数,基于数据可靠性和可靠性系数获
取状态判断神经网络的可信度。
[0054]
具体的,可信度获取模块300包括数量占比获取单元310、变化趋势分析单元320、数据可靠性获取单元330数据可靠性获取单元340、可信度系数获取单元350以及可信度评估单元360。
[0055]
数量占比获取单元310,用于通过对置信度序列进行阈值分割获取置信度阈值,筛选出置信度序列中大于置信度阈值的置信度数量,以其与置信度序列的所有元素的数量的比值作为数量占比。
[0056]
通过最大类间方差法对获取的置信度序列进行阈值分割,得到最佳的置信度阈值,在置信度序列中筛选出大于置信度阈值的置信度,作为高置信度,获取高置信度的数量在置信度序列中的数量占比r,数量占比r越大,置信度序列中高置信度越多,状态判断神经网络的判断结果越准确。
[0057]
变化趋势分析单元320,用于以时刻为横坐标,以每个时刻下压力数据对应的置信度为纵坐标建立坐标系,获取置信度序列在该坐标系中的坐标点,并获取这些坐标点的主成分方向向量,根据主成分方向向量的方向判断其增减变化趋势,根据主成分方向向量与水平方向的夹角获取其变化幅度。
[0058]
获取坐标点的坐标,利用pca算法获得这些数据的主成分方向,可获得k个主成分方向,每个主成分方向都是一个2维的单位向量,每个主成分方向对应一个特征值。将特征值最大的主成分方向作为数据的主方向,表示这些数据投影方差最大的方向,即这些数据的主要分布方向,数据主方向为一个向量,该向量与水平方向的夹角记为α。
[0059]
根据主成分方向向量与水平方向的夹角的角度区间分布对序列的变化趋势进行判断,如果主成分方向向量与水平方向的夹角α落在了0
°‑
90
°
之间,则置信度是增大趋势。如果主成分方向向量与水平方向的夹角α落在了-90
°‑0°
之间,则置信度是减小趋势。
[0060]
以主成分方向向量与水平方向的夹角α的绝对值与90
°
的比值作为变化幅度t:
[0061]
数据可靠性获取单元330,用于根据变化幅度和数量占比获取数据可靠性;当主成分方向向量为增加趋势时,变化幅度与数据可靠性呈正相关关系;当主成分方向向量为减小趋势时,变化幅度与数据可靠性呈负相关关系。
[0062]
将主成分方向向量的变化趋势和变化幅度组成一个二元组,第一个元素表示增大或减小趋势,用0表示减小趋势,用1表示增大趋势;第二个元素为变化幅度t,即趋势的大小。二元组的表示为(0,t)或(1,t)。
[0063]
例如:(1,0.9),表示增大趋势且增大幅度是0.9。变化幅度越接近1,说明数据置信度的变化速度越快。
[0064]
数据可靠性获取单元340,用于根据变化趋势和数量占比获取数据可靠性。
[0065]
当变化趋势为增大时,将1 t作为数量占比r的增大比例,该数据序列的数据可靠性u=(1 t)
×
r;当变化趋势为减小时,将1-t作为数量占比r的减小比例,该数据序列的数据可靠性u=(1-t)
×
r。
[0066]
理想情况下的置信度为1,在增大趋势的前提下,增大趋势越大,置信度越能快速地增加到理想趋势,数据可靠性越大;在减小趋势的前提下,减小趋势越大,置信度越远离
理想趋势,数据可靠性越小。
[0067]
可信度系数获取单元350,用于将置信度序列转换为压力数据范围输入状态判断神经网络,输出对应的第一状态;将置信度序列中不大于置信度阈值的元素置零,得到筛选序列,将其转换为压力数据范围输入状态判断神经网络,输出对应的第二状态;根据第一状态与第二状态是否一致获取可信度系数。
[0068]
根据压力数据的值将置信度序列等比例转换至压力数据范围,作为状态判断神经网络的输入,输出第一状态,若输出状态为没有泄露,则第一状态为0,若输出状态为泄露状态,则第一状态为1。
[0069]
将筛选序列同样等比例转换至压力数据范围,作为状态判断神经网络的输入,输出第二状态,若输出状态为没有泄露,则第二状态为0,若输出状态为泄露状态,则第二状态为1。
[0070]
如果第一状态和第二状态相同,说明置信度小的数据的对结果可信度的影响较小,即状态判断神经网络的输出结果较准确,此时的可信度系数v为1;否则,状态判断神经网络的输出结果准确性较低,此时的可信度系数v为0.8。
[0071]
可信度评估单元360用于基于数据可靠性和可靠性系数获取状态判断神经网络的可信度。
[0072]
以状态判断神经网络的置信度和可信度系数的乘积作为状态判断神经网络的可信度。可信度越大,状态判断神经网络的判断结果越准确。
[0073]
智能控制模块400,用于根据状态判断神经网络的结果和对应的可信度评估液压设备智能控制系统的稳定性,以基于稳定性对液压设备进行智能控制。
[0074]
具体的,智能控制模块400包括稳定性评估单元410。
[0075]
稳定性评估单元410,用于当状态判断神经网络的输出结果为正常且可信度大于可信阈值时,该液压设备智能控制系统稳定;否则该液压设备智能控制系统不稳定,需要进行智能调节。
[0076]
当状态判断神经网络的输出结果为正常,即未泄露状态时,通过状态判断神经网络的可信度作为结果的修正参数,若状态判断神经网络的可信度大于可信阈值时,该液压设备智能控制系统稳定,正常运行;若状态判断神经网络的可信度不大于可信阈值时,说明虽然状态判断神经网络的输出结果为正常,但是该结果的可信度不够高,此时可能泄露轻微,系统未识别出来,因此也需要及时调节,逐渐减小液压缸内部压力使液压设备停止运行,避免泄露严重。
[0077]
当状态判断神经网络的输出结果为异常,即泄露状态时,若状态判断神经网络的可信度大于可信阈值,说明神经网络输出结果准确,此时存在液压泄露,需要对液压设备进行智能控制,逐渐减小液压缸内部压力使液压设备停止运行,同时进行需要人工检修的预警;若状态判断神经网络的可信度不大于可信阈值时,说明此时不仅液压泄露,还有可能造成液压系统的零部件损坏,需要立即停止运行并检修。
[0078]
作为一个示例,本发明实施例中可信阈值的取值为0.8。
[0079]
综上所述,本发明实施例包括神经网络训练模块100、神经网络应用模块200、可信度获取模块300以及智能控制模块400。
[0080]
具体的,神经网络训练模块用于获取液压缸每个时刻下的压力数据,利用多个预
设时间段的压力数据序列以及对应的泄露状态训练状态判断神经网络;通过每个压力数据对应的系统误差计算该压力数据对应的置信度,利用不同状态下的压力数据及其对应的置信度分别训练置信度神经网络;神经网络应用模块用于将采集的压力数据输入训练完成的状态判断神经网络,输出对应的状态,然后将该压力数据输入训练完成的对应状态的置信度神经网络中,输出对应的置信度;可信度获取模块用于获取当前时刻前预设时间段的置信度序列,筛选出大于置信度阈值的置信度的数量占比;同时分析置信度序列的变化趋势,根据变化趋势和数量占比获取数据可靠性;通过将筛选前后的置信度序列转换为压力数据范围分别输入状态判断神经网络,根据前后两次的输出结果得到可靠性系数,基于数据可靠性和可靠性系数获取状态判断神经网络的可信度;智能控制模块用于根据状态判断神经网络的结果和对应的可信度评估液压设备智能控制系统的稳定性,以基于稳定性对液压设备进行智能控制。本发明实施例能够采用神经网络模型及时对液压设备的泄露状态进行检测,并能够通过智能控制做出相应的预警反应,提高系统的灵敏度,对系统的状态进行更加准确的预测和评估。
[0081]
需要说明的是:上述本发明实施例先后顺序仅仅为了描述,不代表实施例的优劣。且上述对本说明书特定实施例进行了描述。其它实施例在所附权利要求书的范围内。在一些情况下,在权利要求书中记载的动作或步骤可以按照不同于实施例中的顺序来执行并且仍然可以实现期望的结果。另外,在附图中描绘的过程不一定要求示出的特定顺序或者连续顺序才能实现期望的结果。在某些实施方式中,多任务处理和并行处理也是可以的或者可能是有利的。
[0082]
本说明书中的各个实施例均采用递进的方式描述,各个实施例之间相同相似的部分互相参见即可,每个实施例重点说明的都是与其他实施例的不同之处。
[0083]
以上所述仅为本发明的较佳实施例,并不用以限制本发明,凡在本发明的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本发明的保护范围之内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。