1.本技术涉及微型器件技术领域,具体涉及一种微型器件的转移方法。
背景技术:
2.led是一种能发光的半导体电子元件,具有能量转换效率高、反应时间短、使用寿命长等优点,微型led(micro-led)是通过将传统的led结构进行薄膜化、微小化、阵列化所得到的微型器件,由于led显示技术的优点,micro-led越来越多地被用到显示的场合。制成一块大尺寸、高分辨率的micro-led显示屏需要对百万或千万片微米级尺寸的micro-led晶片进行转移组装,巨量转移(mass transfer printing,mtp)要求把微米级大小的micro-led晶片从施主晶圆上精准转移固定到目标基板上,以现有的主流led固晶速度,需要花费数十天时间对一块使用micro-led的手机屏幕进行贴装,与oled可以采用印刷等廉价的生产方法轻易制造出大面积的发光面相比,带来了巨大的制造成本消耗,不能满足产业化的要求。因此,需要提出一种新的微型器件的转移方法。
技术实现要素:
3.针对上述技术问题,本技术提供一种微型器件的转移方法,可以提高转移精度和成功率,且转移过程高效易操作。
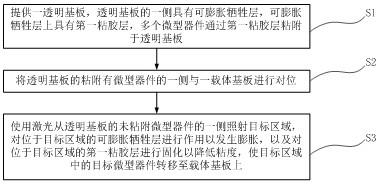
4.为解决上述技术问题,本技术提供一种微型器件的转移方法,包括以下步骤:s1:提供一透明基板,所述透明基板的一侧具有可膨胀牺牲层,所述可膨胀牺牲层上具有第一粘胶层,多个微型器件通过所述第一粘胶层粘附于所述透明基板;s2: 将所述透明基板的粘附有所述微型器件的一侧与一载体基板进行对位;s3: 使用激光从所述透明基板的未粘附所述微型器件的一侧照射目标区域,对位于所述目标区域的可膨胀牺牲层进行作用以发生膨胀,以及对位于所述目标区域的第一粘胶层进行固化以降低粘度,使所述目标区域中的目标微型器件转移至所述载体基板上。
5.可选地,位于所述目标区域的第一粘胶层在吸收激光能量后的粘度为初始粘度的1/10-1/1000。
6.可选地,所述可膨胀牺牲层为包含三氮烯聚合物、聚酰亚胺改性聚合物、云母中至少一种的材料层。
7.可选地,所述s2步骤,包括:提供所述载体基板,所述载体基板的一侧具有第二粘胶层;将所述透明基板的粘附有所述微型器件的一侧与所述载体基板的具有所述第二粘胶层的一侧对位贴靠,或,将所述透明基板的粘附有所述微型器件的一侧与所述载体基板的具有所述第二粘胶层的一侧按照预设距离对位。
8.可选地,所述第二粘胶层为弹性材料,所述第二粘胶层的粘度小于所述第一粘胶层吸收激光能量前的粘度且大于所述第一粘胶层吸收激光能量后的粘度。
9.可选地,所述s3步骤之前,还包括:
确定与位于所述目标区域的可膨胀牺牲层的厚度对应的第一目标激光能量,以及,确定与位于所述目标区域的第一粘胶层在吸收激光能量前后的目标粘度差对应的第二目标激光能量;根据所述第一目标激光能量与所述第二目标激光能量,确定用于照射所述目标区域的目标激光能量;根据所述目标激光能量确定激光的聚焦斑点与所述透明基板之间的距离、激光频率、激光功率中的至少一种。
10.可选地,所述目标激光能量大于或等于所述第一目标激光能量与所述第二目标激光能量之和。
11.可选地,所述s3步骤之后,还包括:s4:将所述载体基板的粘附有所述目标微型器件的一侧与接收基板的接收侧对位贴靠;s5:降低所述第二粘胶层的粘度,使所述目标微型器件转移至所述接收基板上。
12.可选地,所述微型器件为micro-led,所述s5步骤之前,还包括:对所述接收基板进行升温,使所述目标微型器件与所述接收基板的接收侧上的焊点键合。
13.可选地,所述透明基板、所述载体基板与所述接收基板上分别设有对位标记。
14.本技术的微型器件的转移方法,包括以下步骤:提供一透明基板,透明基板的一侧具有可膨胀牺牲层,可膨胀牺牲层上具有第一粘胶层,多个微型器件通过第一粘胶层粘附于透明基板;将透明基板的粘附有微型器件的一侧与一载体基板进行对位;使用激光从透明基板的未粘附微型器件的一侧照射目标区域,对位于目标区域的可膨胀牺牲层进行作用以发生膨胀,以及对位于目标区域的第一粘胶层进行固化以降低粘度,使目标区域中的目标微型器件转移至载体基板上。通过激光精准、快速地对目标区域的可膨胀牺牲层进行局部膨胀作用和对第一粘胶层的局部固化作用,有效减少目标微型器件与第一粘胶层分离时的阻力,提高转移精度和成功率,且转移过程高效易操作。
附图说明
15.图1是根据第一实施例示出的微型器件的转移方法的流程示意图。
16.图2是根据第一实施例示出的微型器件的转移方法中s1步骤的示意图。
17.图3是图2中区域i的放大示意图。
18.图4是根据第一实施例示出的微型器件的转移方法中s2与s3步骤的示意图。
19.图5是图4中区域ii的放大示意图。
20.图6是激光照射前后的对比图,其中,(a)为激光照射前的俯视图,(b)为激光照射后的俯视图。
21.图7是根据第一实施例示出的微型器件的转移方法中s3步骤得到的结构示意图。
具体实施方式
22.以下由特定的具体实施例说明本技术的实施方式,熟悉此技术的人士可由本说明书所揭露的内容轻易地了解本技术的其他优点及功效。
23.在下述描述中,参考附图,附图描述了本技术的若干实施例。应当理解,还可使用其他实施例,并且可以在不背离本技术的精神和范围的情况下进行机械组成、结构、电气以及操作上的改变。下面的详细描述不应该被认为是限制性的,这里使用的术语仅是为了描述特定实施例,而并非旨在限制本技术。
24.虽然在一些实例中术语第一、第二等在本文中用来描述各种元件,但是这些元件不应当被这些术语限制。这些术语仅用来将一个元件与另一个元件进行区分。
25.再者,如同在本文中所使用的,单数形式“一”、“一个”和“该”旨在也包括复数形式,除非上下文中有相反的指示。应当进一步理解,术语“包含”、“包括”表明存在所述的特征、步骤、操作、元件、组件、项目、种类、和/或组,但不排除一个或多个其他特征、步骤、操作、元件、组件、项目、种类、和/或组的存在、出现或添加。此处使用的术语“或”和“和/或”被解释为包括性的,或意味着任一个或任何组合。因此,“a、b或c”或者“a、b和/或c”意味着“以下任一个:a;b;c;a和b;a和c;b和c;a、b和c”。仅当元件、功能、步骤或操作的组合在某些方式下内在地互相排斥时,才会出现该定义的例外。
26.第一实施例图1是根据第一实施例示出的微型器件的转移方法的流程示意图。如图1所示,本技术的微型器件的转移方法,包括以下步骤:s1:提供一透明基板,透明基板的一侧具有可膨胀牺牲层,可膨胀牺牲层上具有第一粘胶层,多个微型器件通过第一粘胶层粘附于透明基板;s2: 将透明基板的粘附有微型器件的一侧与一载体基板进行对位;s3: 使用激光从透明基板的未粘附微型器件的一侧照射目标区域,对位于目标区域的可膨胀牺牲层进行作用以发生膨胀,以及对位于目标区域的第一粘胶层进行固化以降低粘度,使目标区域中的目标微型器件转移至载体基板上。
27.其中,请参考图2,s1步骤中,透明基板10可为蓝宝石衬底或其它透明材料,透明基板10的一侧具有可膨胀牺牲层11,可膨胀牺牲层11可在激光照射下发生体积膨胀,优选地,可膨胀牺牲层11为可裂解材料层,从而可在激光照射下发生裂解而定向膨胀,通过可膨胀牺牲层11内部能量传递,产生背向透明基板10的推力。可选地,可膨胀牺牲层11为包含三氮烯聚合物、聚酰亚胺改性聚合物、云母中至少一种的材料层,从而,在激光照射下可以发生裂解而体积膨胀。
28.可膨胀牺牲层11的背向透明基板10的一侧具有第一粘胶层12,第一粘胶层12可利用诸如旋涂或静电纺丝等涂覆方式形成。第一粘胶层12可采用光感应材料,例如为对紫外、红外等光敏胶材,本实施例采用的第一粘胶层12为紫外敏感胶材,可选地,紫外敏感胶材包含以下重量百分比组成:20-50%(甲基)丙烯酸烷基酯、15-40%(甲基)丙烯酸羟烷基酯、10-15%n原子极性单体、10-20%活性稀释剂、0.1-2%链转移剂、0.5-1%热引发剂、0.5-1%光引发剂。
29.多个微型器件通过转印的方式从蓝宝石衬底上剥离并转移至第一粘胶层12上,微型器件包括不需要转移到载体基板的非目标微型器件31和需要转移到载体基板的目标微型器件32。可选地,微型器件包括micro-led。如图3所示,以目标微型器件32所在区域举例,由于目标微型器件32转移到第一粘胶层12上时,第一粘胶层12不是固化状态,在第一粘胶层12的表面张力作用下,目标微型器件32的边角会陷入第一粘胶层12中,形成底部被第一
粘胶层12包裹的状态,此时,如对第一粘胶层12进行固化,固化后的第一粘胶层12将包住目标微型器件32的底部而对目标微型器件32的剥离产生阻力。
30.请参考图4,在s2步骤中,提供载体基板40,载体基板40的一侧具有第二粘胶层41,将透明基板10的粘附有微型器件的一侧与载体基板40的具有第二粘胶层41的一侧按照预设距离对位,也即,第二粘胶层41与微型器件之间留有一定的距离,例如30~70nm,该距离可以根据可膨胀牺牲层11膨胀前后的厚度差进行设置,以使得在激光50照射后,目标微型器件32可以被推动至与第二粘胶层41接触而粘附在第二粘胶层41上,获得合适的粘附力,且可以减少第一粘胶层12对目标微型器件32的底部边角的包裹程度,便于分离。或者,也可以将透明基板10的粘附有微型器件的一侧与载体基板40的具有第二粘胶层41的一侧对位贴靠,也即,第二粘胶层41与微型器件直接接触,从而在激光50照射后,目标微型器件32可以被推动至与第二粘胶层41更紧密粘附的状态,便于分离。可选地,透明基板10与载体基板40设有对位标记,以使透明基板10与载体基板40之间更准确对位。
31.第二粘胶层41的粘度小于第一粘胶层12吸收激光能量前的粘度且大于第一粘胶层12吸收激光能量后的粘度,从而在第一粘胶层12被激光50照射而粘度降低后,被激光50照射位置的第一粘胶层12上的目标微型器件32与第一粘胶层12的粘合力小于与第二粘胶层41的粘合力,实现目标微型器件32从透明基板10到载体基板40的转移。可选地,第二粘胶层41为弹性材料,一方面可固定微型器件,另一方面还可作为缓冲层,在微型器件与第二粘胶层41接触时吸收部分应力减少微型器件破碎。
32.请结合图4与图5,在s3步骤中,使用激光50从透明基板10的未粘附微型器件的一侧进行照射,对位于目标区域的可膨胀牺牲层11进行作用,使目标区域的可膨胀牺牲层11朝向目标微型器件32膨胀凸起,将目标微型器件32顶起,在此过程中,目标微型器件32的底部边角与第一粘胶层12发生分离,使得第一粘胶层12不再包住目标微型器件32的底部边角或减少了包住目标微型器件32的底部边角的程度。从图6中(a)可以看出,目标微型器件32转移到第一粘胶层12上时,第一粘胶层12不是固化状态,在第一粘胶层12的表面张力作用下,目标微型器件32的边角会陷入第一粘胶层12中,形成底部被第一粘胶层12包裹的状态,从而目标微型器件32的边角周围的第一粘胶层12凹陷并呈弧形状态,从图6中(b)可以看出,在激光50照射后,目标微型器件32的边角周围的第一粘胶层12的凹陷消失且不再呈弧形状态,这是因为可膨胀牺牲层11朝向目标微型器件32膨胀凸起,将目标微型器件32顶起后,第一粘胶层12不再包住目标微型器件32的底部边角或减少了包住目标微型器件32的底部边角的程度。此外,目标微型器件32被可膨胀牺牲层11向前推动后,减少了第一粘胶层12对目标微型器件32的表面张力作用。
33.在此基础上,激光50还对目标微型器件32所在目标区域的第一粘胶层12进行固化,降低位于目标区域的第一粘胶层12的粘度。如此,在可膨胀牺牲层11的局部膨胀和第一粘胶层12的局部固化作用下,有效减少目标微型器件32与第一粘胶层12分离时的阻力,目标微型器件32转移至载体基板40上,提高了转移成功率,并且,当可膨胀牺牲层11通过裂解的方式进行体积定向膨胀时,对周围区域影响小,转移精度更高。通过设置第二粘胶层41的载体基板40从透明基板10上以接触目标微型器件32的方式拾取目标微型器件32,可以避免目标微型器件32在转移过程中移位,定位精度更高。如图7所示,转移后的目标微型器件32之间的距离相对微型器件在透明基板10上的原始距离增大,实现扩大晶片阵列距离的目
的。
34.为更精确实现转移,在s3步骤之前,还包括:确定与位于目标区域的可膨胀牺牲层的厚度对应的第一目标激光能量,以及,确定与位于目标区域的第一粘胶层在吸收激光能量前后的目标粘度差对应的第二目标激光能量;根据第一目标激光能量与第二目标激光能量,确定用于照射目标区域的目标激光能量;根据目标激光能量确定激光的聚焦斑点与透明基板之间的距离、激光频率、激光功率中的至少一种。
35.其中,第一目标激光能量与位于目标区域的可膨胀牺牲层11的厚度对应。具体地,激光光子与可膨胀牺牲层11的相互作用从透明基板10和可膨胀牺牲层11的界面开始,入射激光脉冲在可膨胀牺牲层11内引起突然的局部光分解,考虑到吸收光强度随着传播长度的增加而衰减,激光50触发的体积膨胀是否足以穿孔和烧蚀整个可膨胀牺牲层11,或是否足以剥离和向前喷射剩余的顶层,取决于可膨胀牺牲层11的厚度和激光50的能量密度,要求膨胀时释放的压力推力的影响足以克服剩余的覆盖材料的机械阻力和内聚力。以三氮烯发色团的光分解过程为例,根据激光能量密度在30mj/cm2~180mj/cm2之间的烧蚀深度d(f)值,可以得到很好地与唯象方程拟合的特征烧蚀曲线:,其中,α
eff
是有效吸收系数,α
eff
≈56000cm-1
;f是注量,f
th
是阈值注量,注量也即激光50的能量密度,f
th
≈28mj/cm2。如此,在可膨胀牺牲层11的厚度确定后,烧蚀深度d(f)值即可确定,进而可以确定所需的激光能量f。
36.第二目标激光能量与位于目标区域的第一粘胶层12在吸收激光能量前后的目标粘度差对应。通过平衡衍射和光斑效应得到激光50在特定透镜的最小光斑尺寸的聚焦斑点,使激光50作为第一粘胶层12的光感应材料的聚合起始剂,局部固化特定间距的目标微型器件32所在目标区域的第一粘胶层12,使位于目标区域的第一粘胶层12的粘度降低。可选地,激光50可为紫外、红外等有源激光,位于目标区域的第一粘胶层12在吸收激光能量后的粘度优选为初始粘度的1/10~1/1000。
37.具体地,可以基于预设模型确定第二目标激光能量,预设模型为基于实验数据优化得到的模型,用于表征激光50的激光能量、第一粘胶层12在吸收激光能量前后的粘度差、目标微型器件32从透明基板10到载体基板40的转移结果之间的关系。可根据第一粘胶层12的材料类型、第一粘胶层12的厚度、目标微型器件32的尺寸等参考因素确定第一粘胶层12在吸收激光能量前后的目标粘度差,进而,将目标粘度差输入预设模型中,基于预设模型输出的激光能量和转移结果,确定转移结果为成功时可以选择的激光能量,即为第二目标激光能量。
38.可选地,为得到所述预设模型,本技术的方法,还包括:进行多组实验;采集多组实验数据,实验数据包括激光能量、第一粘胶层的粘度差和微型器件从透明基板到载体基板的转移结果;
将多组实验数据作为训练数据训练svm模型,并采用pso算法优化svm模型的参数,得到预设模型。
39.可选地,为了区分微型器件从透明基板10到载体基板40的转移结果是否成功,需要一个基于svm(support vector machine,支持向量机)的分类器模型。本实施例引入高斯核函数作为基于svm的分类器模型的核函数来识别特征信号,微型器件从透明基板10到载体基板40的转移实验重复执行数百次,从实验数据中提取激光能量、第一粘胶层12在吸收激光能量前后的粘度差作为特征信号,训练数据包括大量的激光能量、第一粘胶层12的粘度差、微型器件从透明基板10到载体基板40的转移结果。为了改进分类,采用pso(particle swarm optimization,粒子群优化算法)算法优化svm模型的参数。pso算法通过迭代搜索最优解,利用局部最优值可以实现全局最优。最后,基于svm模型可以达到分类精度,通过调整模型的传递参数来优化传递过程。基于svm模型的预测结果能够优化微型器件的转移过程,并有益于微型器件的自动大规模转移。
40.可选地,本实施例使用的激光器为固体激光器,由激光工作物质、抽运源、聚光腔和光学谐振腔组成,工作物质是作为基质材料的晶体或玻璃种均匀掺入少量激活离子。本实施例中所选用的为可调谐ce
3
激光器,通过反射镜来完成聚焦激光束,将大光束聚焦到单个精确点,且该点的热密度极高。可选地,激光调焦的装置可为一个或者多个。
41.可选地,考虑到可膨胀牺牲层11向前喷射时目标微型器件32受到的推力大小,结合第一粘胶层12的能量需求,目标激光能量大于或等于第一目标激光能量与第二目标激光能量之和,例如为79~125mj/cm2。进而,根据目标激光能量确定激光50的聚焦斑点与透明基板10之间的距离、激光频率、激光功率中的至少一种。其中,激光50作为可膨胀牺牲层11的膨胀激发能量以及第一粘胶层12的聚合起始剂,通过调整激光50的聚焦斑点与透明基板10的距离,可以调整可膨胀牺牲层11的膨胀范围以及第一粘胶层12的聚合程度及波动范围,尤其聚合起始剂的波动范围应不能影响到邻近的微型器件,尤其不能影响到不需要转移的非目标微型器件31,因而在确定所需要的目标激光能量后,通过调控最佳距离,进而确定相应的激光频率与激光功率,可以保证目标微型器件32转移而邻近的非目标微型器件31不发生转移,提高转移精度。
42.可选地,s3步骤之后,还包括:s4:将载体基板的粘附有目标微型器件的一侧与接收基板的接收侧对位贴靠;s5:降低第二粘胶层的粘度,使目标微型器件转移至接收基板上。
43.可选地,载体基板40与接收基板上分别设有对位标记,载体基板40与接收基板之间通过对位标记进行对位。可选地,第二粘胶层41为粘度可变材料,包括但不限于热敏材料、光敏材料,可为单组分聚合物,也可为多组分聚合物,从而通过对载体基板40进行升温和/或光辐射处理可以降低第二粘胶层41的粘度,目标微型器件32与接收基板之间的连接力大于与载体基板40之间的粘力时,即可将目标微型器件32转移至接收基板上。
44.可选地,微型器件为micro-led,s5步骤之前,还包括:对接收基板进行升温,使目标微型器件与接收基板的接收侧上的焊点键合。
45.当目标微型器件32与接收基板的接收侧上的焊点键合后,目标微型器件32与接收基板之间的连接力将大于与载体基板40之间的粘力,通过将载体基板40与接收基板进行分离,即可将目标微型器件32转移至接收基板上。
46.通过上述方式,本技术改善了激光剥离技术中微型器件转移存在的对位和成功率的难题,在可膨胀牺牲层的局部膨胀和第一粘胶层的局部固化作用下,有效减少目标微型器件与第一粘胶层分离时的阻力,避免激光对第一粘胶层处理后微型器件仍无法顺利脱离第一粘胶层,提高了转移成功率,并利用粘胶层承载局部固化的目标微型器件,可提高对位效果,降低了微型器件的不良率。此外,采用激光局部固化,无需制备掩膜图形,工艺简单易操作,降低成本,是微型器件高效选择性批量转移的有效方法。
47.本技术的微型器件的转移方法,包括以下步骤:提供一透明基板,透明基板的一侧具有可膨胀牺牲层,可膨胀牺牲层上具有第一粘胶层,多个微型器件通过第一粘胶层粘附于透明基板;将透明基板的粘附有微型器件的一侧与一载体基板进行对位;使用激光从透明基板的未粘附微型器件的一侧照射目标区域,对位于目标区域的可膨胀牺牲层进行作用以发生膨胀,以及对位于目标区域的第一粘胶层进行固化以降低粘度,使目标区域中的目标微型器件转移至载体基板上。通过激光精准、快速地对目标区域的可膨胀牺牲层进行局部膨胀作用和对第一粘胶层的局部固化作用,有效减少目标微型器件与第一粘胶层分离时的阻力,提高转移精度和成功率,且转移过程高效易操作。
48.上述实施例仅例示性说明本技术的原理及其功效,而非用于限制本技术。任何熟悉此技术的人士皆可在不违背本技术的精神及范畴下,对上述实施例进行修饰或改变。因此,举凡所属技术领域中具有通常知识者在未脱离本技术所揭示的精神与技术思想下所完成的一切等效修饰或改变,仍应由本技术的权利要求所涵盖。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。