技术特征:
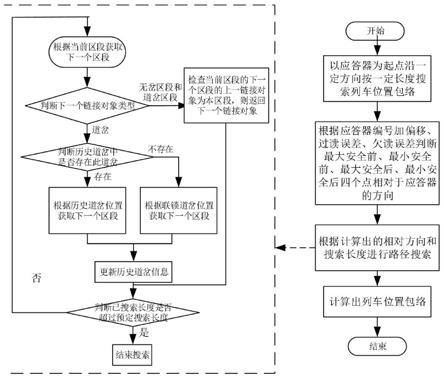
1.一种用于移动闭塞的列车位置包络计算方法,其特征在于,所述方法为:以应答器位置为起点,根据列车估计前端到应答器的距离以及列车定位误差分别确定最大安全前端、最小安全前端、最大安全后端以及最小安全后端相对于应答器的搜索方向和搜索长度;从而确定最大安全前端位置、最小安全前端位置、最大安全后端位置以及最小安全后端位置。2.根据权利要求1所述的方法,其特征在于,所述列车定位误差包括欠读误差和过读误差。3.根据权利要求1或2所述的方法,其特征在于,所述列车最大安全前端的搜索方向为列车运行方向,所述列车最大安全前端的搜索长度为列车估计前端到应答器的距离与欠读误差之和。4.根据权利要求2所述的方法,其特征在于,若所述过读误差大于列车估计前端到应答器的距离,则列车最小安全前端的搜索方向为列车运行方向的反方向,列车最小安全前端的搜索长度为所述过读误差减去列车安全估计前端到应答器的距离;列车最大安全后端的搜索方向为列车运行方向的反方向,列车最大安全后端的搜索长度为列车长度减去所述欠读误差与列车估计前端到应答器的距离;列车最小安全后端的搜索方向为列车运行方向的反方向,列车最大安全后端的搜索长度为列车长度加上所述过读误差再减去列车估计前端到应答器的距离。5.根据权利要求2所述的方法,其特征在于,若所述过读误差小于/等于列车估计前端到应答器的距离,则列车最小安全前端的搜索方向为列车运行方向,列车最小安全前端的搜索长度为列车估计前端到应答器的距离与所述过读误差之差;列车最大安全后端、最小安全后端的搜索方向和搜索长度根据列车长度与列车估计前端到应答器的距离与所述欠读误差之和的大小关系确定。6.根据权利要求5所述的方法,其特征在于,若列车长度大于列车估计前端到应答器的距离加上欠读误差,则列车最大安全后端的搜索方向为列车运行的反方向,列车最大安全后端的搜索长度为列车长度减去列车估计前端到应答器的距离与欠读误差;列车最小安全后端的搜索方向为列车运行的反方向,列车最小安全后端的搜索长度为列车长度加上过读误差再减去列车估计前端到应答器的距离;若列车长度小于/等于列车估计前端到应答器的距离加上欠读误差,则列车最大安全后端的搜索方向为列车运行方向,列车最大安全后端的搜索长度为列车估计前端到应答器的距离与欠读误差之和减去列车长度;列车最小安全后端的搜索方向和搜索长度根据列车长度与列车估计前端到应答器的距离与过读误差之差的大小关系确定。7.根据权利要求6所述的方法,其特征在于,若列车长度大于列车估计前端到应答器的距离与过读误差之差,则列车最小安全后端的搜索方向为列车运行方向的反方向,列车最小安全后端的搜索长度为列车长度加上过读误差再减去列车估计前端到应答器的距离;若列车长度小于/等于列车估计前端到应答器的距离与过读误差之差,则列车最小安全后端的搜索方向为列车运行方向,列车最小安全后端的搜索长度为列车估计前端到应答器的距离减去列车长度与过读定位误差。8.根据权利要求1所述的方法,其特征在于,以应答器位置为起点,根据列车估计前端
到应答器的距离以及列车定位误差分别确定最大安全前端、最小安全前端、最大安全后端以及最小安全后端相对于应答器的搜索方向和搜索长度包括:以应答器位置为起点搜索下一区段,判断下一区段的链接对象类型;根据链接对象类型确定应答器至下一区段的搜索长度。9.根据权利要求8所述的方法,其特征在于,若所述链接对象类型为道岔,则判断该道岔是否在历史道岔中存在;若该道岔在历史道岔中不存在,则根据联锁设备获取的道岔开向搜索下一区段;若该道岔在历史道岔中存在,则根据历史道岔开向搜索下一区段;判断应答器位置至道岔所在位置的长度是否超过目标长度,若未超过目标长度,则继续搜索直至超过目标长度结束搜索;若超过目标长度,则结束搜索;若所述链接对象类型为无岔区段/道岔区段,则检查该无岔区段/道岔区段的上一区段的下一链接对象为该无岔区段/道岔区段,判断该无岔区段/道岔区段的长度是否超过目标长度;若未超过目标长度,则继续搜索直至超过目标长度结束搜索;若超过目标长度,则结束搜索。10.根据权利要求1所述的方法,其特征在于,以应答器位置为起点,根据列车估计前端到应答器的距离以及列车定位误差分别确定最大安全前端、最小安全前端、最大安全后端以及最小安全后端相对于应答器的搜索方向和搜索长度之前,判断地面设备是否首次收到列车位置报告,若地面设备首次收到列车位置报告,则判断列车车尾是否通过距离当前应答器最近的道岔;若地面设备非首次收到列车位置报告,则以应答器为起点开始路径搜索。11.根据权利要求10所述的方法,其特征在于,若列车车尾未通过距离当前应答器最近的道岔,则以应答器为起点开始路径搜索;若列车车尾已通过距离当前应答器最近的道岔,联锁设备汇报的道岔开向不准确,无法确定列车走向,则计算列车位置包络。12.一种实现如权利要求1、2、4、5、6、7、8、9、10和11任一项所述用于移动闭塞的列车位置包络计算方法的装置,其特征在于,所述装置包括地面设备、联锁设备以及车载设备atp,其中,所述联锁设备用于将道岔开向信息发送至地面设备;所述车载设备atp用于将应答器位置信息以及列车估计前端距离应答器的偏移发送至地面设备;所述地面设备用于接收联锁设备发送的道岔开向信息和车载设备atp发送的应答器位置信息、列车估计前端距离应答器的偏移;并根据道岔开向信息、应答器位置信息以及列车估计前端距离应答器的偏移计算列车位置包络。13.一种用于移动闭塞的列车位置包络计算系统,其特征在于,所述系统包括确定单元;所述确定单元用于以应答器位置为起点,根据列车估计前端到应答器的距离以及列车定位误差分别确定最大安全前端、最小安全前端、最大安全后端以及最小安全后端相对于应答器的搜索方向和搜索长度;从而确定最大安全前端位置、最小安全前端位置、最大安全后端位置以及最小安全后端位置。
14.根据权利要求13所述的系统,其特征在于,所述系统还包括判断单元,所述判断单元用于以应答器位置为起点,根据列车估计前端到应答器的距离以及列车定位误差分别确定最大安全前端、最小安全前端、最大安全后端以及最小安全后端相对于应答器的搜索方向和搜索长度;从而确定最大安全前端位置、最小安全前端位置、最大安全后端位置以及最小安全后端位置之前,判断地面设备是否首次收到列车位置报告。15.根据权利要求14所述的系统,其特征在于,所述判断单元用于判断地面设备是否首次收到列车位置报告包括:若地面设备首次收到列车位置报告,则判断模块用于判断列车车尾是否通过距离当前应答器最近的道岔。16.根据权利要求13-15任一项所述的系统,其特征在于,所述确定单元还包括搜索模块,所述搜索模块用于以应答器位置为起点搜索下一区段,判断下一区段的链接对象类型;并根据链接对象类型确定应答器至下一区段的搜索长度。17.一种计算机可读存储介质,其特征在于,所述计算机存储介质存储有计算机程序,所述计算机程序被处理器执行时实现如权利要求1、2、4、5、6、7、8、9、10和11任一项所述的方法。
技术总结
本发明涉及用于移动闭塞的列车位置包络计算方法、装置及系统,该计算方法为:以应答器位置为起点,根据列车估计前端到应答器的距离以及列车定位误差分别确定最大安全前端、最小安全前端、最大安全后端以及最小安全后端相对于应答器的搜索方向和搜索长度;从而确定最大安全前端位置、最小安全前端位置、最大安全后端位置以及最小安全后端位置。该方法有助于在车载设备未携带电子地图的情况下地面设备定位列车具体位置,从而可以为列车计算行车许可,有利于实现多车紧密追踪,为实现移动闭塞创造条件,提高运行效率。提高运行效率。提高运行效率。
技术研发人员:陈志强 张艳辉 崔佳诺 张利峰 李莹莹 杜江红 杨韬 焦万立 王伟杰 南若愚 陈俊杰 苏艳
受保护的技术使用者:中国铁路通信信号股份有限公司
技术研发日:2022.01.21
技术公布日:2022/5/25
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。