1.本发明涉及无人机航空领域,尤其涉及一种基于无杆气缸真空差压无人机气动弹射系统及弹射方法。
背景技术:
2.随着各国军事科技的不断进步,尤其是第五代战斗机技术的成熟与应用,在人们开始探索第六代战机应是无人或有人机的大背景下,世界各国,尤其是各军事强国在无人机技术领域已经深耕多年,无人机系统技术已经得到了极大地发展,投入实战的无人机在局部战争中战果十分显著。
3.无人机区别于有人机的一个主要特点便是其起飞方式,尤其针对无起落架的无人机,必须配备相应的弹射起飞设备,才能使无人机真正达到作战使用状态的目的。针对火箭助推起飞方式,无人机起飞阶段难免会对环境产生声光烟雾等污染,同时军事领域中会暴露无人机弹射位置及弹射规格,战时环境下可能暴露发射阵地,使其作战效果大打折扣。为此,西方国家如美国“影子200”、“天鹰”以及瑞士“巡逻兵”、英国“不死鸟”等一些知名的无人机起飞方式大多采用气动弹射方式。
4.实现大质量、高起飞速度需求的无人机弹射一直是亟待解决的关键问题,在我国无人机系统技术快速发展与应用的同时,研发国内无人机气动弹射辅助起飞装备具有重要意义。
技术实现要素:
5.本专利的目的在于提供一种真空条件下无杆气缸无人机气动弹射器及其气路控制系统。
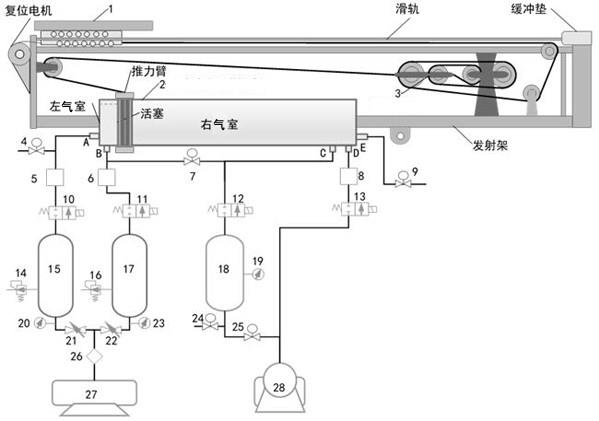
6.为实现上述技术效果,本发明是通过以下技术方案实现的:一种基于无杆气缸真空差压无人机气动弹射系统,包括机械组件和气路控制系统,所述机械组件包括无人机发射架、滑轨、滑车、滑轮组和无杆气缸,所述无人机发射架上设置有滑轨,所述滑轨与滑轮组相连,所述滑轨上设置有滑车,所述滑轮组与无杆气缸相连;所述无杆气缸包括活塞和位于活塞左右两侧的左气室和右气室,所述气路控制系统与无杆气缸连通,且气路控制系统在弹射前对无杆气缸右气室抽真空形成负压环境,并在弹射过程中一直保持右气室保持为负压环境。
7.进一步地,所述气路控制系统中设置有空压机,所述空压机连接有油水分离器,所述油水分离器分别与高压气瓶和低压气瓶相连,所述高压气瓶与无杆气缸的左气室气口a相连通;所述低压气瓶与无杆气缸的左气室气口b和右气室气口c相连通。
8.再进一步地,所述油水分离器与高压气瓶之间设置有高压气路截止阀,所述油水分离器与低压气瓶之间设置有低压气路截止阀,所述高压气瓶与左气室气口a之间依次设置有高压进气开关阀和高压进气调节阀,低压气瓶与左气室气口b之间依次设置有低压进气开关阀和低压进气调节阀。
9.再进一步地,在高压气路截止阀与高压气瓶之间设置有高压气瓶压力表,在低压气路截止阀与低压气瓶之间设置有低压气瓶压力表;所述高压气瓶还与高压气瓶减压阀相连,所述低压气瓶还与低压气瓶减压阀相连,所述左气室气口a还连接有左气室排气阀。
10.进一步地,所述气路控制系统中设置有真空泵,所述真空泵与负压储能瓶相连,所述负压储能瓶与右气室气口c相连通,所述真空泵还与右气室气口d相连,无杆气缸的右气室排气口e处有右气室排气阀。
11.再进一步地,所述真空泵与负压储能瓶之间设置有抽真空开关阀,所述负压储能瓶与右气室气口c之间设置有第一负压开关阀,所述真空泵与右气室气口d之间依次设置有第二负压开关阀和真空度调节阀,再进一步地,所述抽真空开关阀与负压储能瓶之间设置有负压气瓶通气阀,所述负压储能瓶连接有负压气瓶压力表。
12.本发明的优点在于:本技术的真空差压气动弹射系统,通过供气系统(真空泵、空压机、储能器以及各种控制阀)、无杆气缸与滑轮组的配合,能够实现无人机平稳加速、滑车载具快速缓冲以及复位功能。
附图说明
13.图1为无人机真空差压无杆缸气动弹射原理及气路系统。
14.图2为无人机真空差压无杆缸气动弹射系统压力变化理论曲线。
15.1-滑车、2-无杆气缸、3-滑轮组、4-左气室排气阀、5-高压进气调节阀、6-低压进气调节阀、7-左右气室连通阀、8-真空度调节阀、9-右气室排气阀、10-高压进气开关阀、11-低压进气开关阀、12-第一负压开关阀、13-第二负压开关阀、14-高压气瓶减压阀、15-高压气瓶、16-低压气瓶减压阀、17-低压气瓶、18-负压储能气瓶、19-负压气瓶压力表、20-高压气瓶压力表、21-高压气路截止阀、22-低压气路截止阀、23-低压气瓶压力表、24-负压气瓶通气阀、25-抽真空开关阀、26-油水分离器、27-空压机、28-真空泵。
具体实施方式
16.下面对本发明的实施例作详细说明,本实施例在以本发明技术方案为前提下进行实施,给出了详细的实施方式和具体的操作过程,但本发明的保护范围不限于下述的实施例。
17.实施例1一种基于无杆气缸2真空差压无人机气动弹射系统,包括机械组件和气路控制系统,所述机械组件包括无人机发射架、滑轨、滑车1、滑轮组3和无杆气缸2,所述无人机发射架上设置有滑轨,所述滑轨与滑轮组3相连,所述滑轨上设置有滑车1,所述滑轮组3与无杆气缸2相连;所述无杆气缸2包括活塞和位于活塞左右两侧的左气室和右气室,所述气路控制系统与无杆气缸2连通,且气路控制系统在弹射前对无杆气缸2右气室抽真空形成负压环境,并在弹射过程中一直保持右气室保持为负压环境。因此,活塞向前运动时右气室内产生的阻力较小,同时由于活塞右侧负压,在活塞左右两侧形成的气动压力差更大,理论上在同等截面积缸径条件下,该弹射系统产生的推力更大、活塞运动阻力更小;另外由于采用了无
杆气缸2作为作动机构,发射架上用于气缸安装的空间尺寸减小至原普通气缸一半,可降低发射系统重量、提高该无人机弹射系统的机动部署能力。
18.实施例2一种基于无杆气缸真空差压无人机气动弹射方法,包括如下步骤:步骤一,弹射准备阶段:将无人机安装在滑车1上,打开空压机27以及高压气路截止阀21与低压气路截止阀22,为高压气瓶15与低压气瓶17进行恒压供气,并打开第一负压开关阀12与第二负压开关阀13,开启真空泵28为负压储能气瓶18抽真空,通过pid算法控制真空度调节阀8,将负压储能气瓶18内真空度稳定在设定值(0.01mpa),当负压储能气瓶18中的真空度达到设定值后,关闭第一负压开关阀12,继续对无杆气缸的右气室抽真空至设定值(0.01mpa),当高压气瓶15、低压气瓶17及负压储能气瓶18的压力达到设定值压力后,关闭前述除真空度调节阀8和第二负压开关阀13之外的其余阀门及空压机27,完成弹射前准备工作。此时,由于右侧气室内负压存在,滑车虽被锁紧,但已经具备向前的运动趋势。本技术的步骤中,本领域技术人员知晓如何通过pid算法控制真空度调节阀8。
19.步骤二,弹射前稳压阶段:通过pid算法控制真空度调节阀8及左气室排气阀4,在无杆气缸活塞左气室和右气室之间建立弹射压差;步骤三,弹射阶段:关闭左气室排气阀4、右气室排气阀9以及第二负压开关阀13,打开高压进气开关阀10,通过高压进气调节阀5控制流入左气室气口a的气流量,同时打开第一负压开关阀12和抽真空开关阀25;此时,闭锁机构将滑车1解锁,高压气体迅速进入无杆气缸2的左气室,在活塞左右气室压差作用下,活塞快速向前运动,经推力臂拉动增速滑轮组3牵引滑车1连带无人机在发射架上以数倍于活塞的速度向前运动,达到弹射速度后,无人机飞离发射架;步骤四,气压缓冲阶段:滑车1通过缓冲垫缓冲减速,打开左气室排气阀4和右气室排气阀9,并打开连通左右气室连通阀7,平衡气缸左气室与右气室的压力,无杆气缸同时也进入气压减速缓冲阶段,理论压力变化曲线见附图2。所述步骤四中气压缓冲阶段的工作过程具体为:关闭高压进气开关阀10、高压进气调节阀5、第一负压开关阀12、第二负压开关阀13和抽真空开关阀25,打开低压进气开关阀11,经过低压进气调节阀6,低压缓冲气体同时进入左右气室,再经左气室气口a与右气室气口e排出,达到活塞减速目的。
20.步骤五,压力平衡阶段:待活塞静止后,延时n秒,让低压气瓶17内气体同时进入活塞两侧气室,待左气室和右气室压力平衡后进入卸压阶段;步骤五中的n大于等于5秒。
21.步骤六,卸压阶段:关闭低压进气开关阀11,无杆气缸内剩余气体,经左气室排气阀4和右气室排气阀9排出,缸内压力恢复常压;启动复位电机,通过滑轨内置的牵引绳将滑车1复位,并通过闭锁机构将滑车锁定,同时,滑轮组作用下,无杆气缸的活塞也被复位,系统可进入下一次弹射准备阶段。
22.实施例3
一种基于无杆气缸2真空差压无人机气动弹射系统,包括机械组件和气路控制系统,所述机械组件包括无人机发射架、滑轨、滑车1、滑轮组3和无杆气缸2,所述无人机发射架上设置有滑轨,所述滑轨与滑轮组3相连,所述滑轨上设置有滑车1,所述滑轮组3与无杆气缸2相连;所述无杆气缸2包括活塞和位于活塞左右两侧的左气室和右气室,所述气路控制系统与无杆气缸2连通,且气路控制系统在弹射前对无杆气缸2右气室抽真空形成负压环境,并在弹射过程中一直保持右气室保持为负压环境。因此,活塞向前运动时右气室内产生的阻力较小,同时由于活塞右侧负压,在活塞左右两侧形成的气动压力差更大,理论上在同等截面积缸径条件下,该弹射系统产生的推力更大、活塞运动阻力更小;另外由于采用了无杆气缸2作为作动机构,发射架上用于气缸安装的空间尺寸减小至原普通气缸一半,可降低发射系统重量、提高该无人机弹射系统的机动部署能力。
23.气路控制系统中设置有空压机27,所述空压机27连接有油水分离器26,所述油水分离器26分别与高压气瓶15和低压气瓶17相连,所述高压气瓶15与无杆气缸2的左气室气口a相连通;所述低压气瓶17与无杆气缸2的左气室气口b和右气室气口c相连通。油水分离器26与高压气瓶15之间设置有高压气路截止阀21,所述油水分离器26与低压气瓶17之间设置有低压气路截止阀22,所述高压气瓶15与左气室气口a之间依次设置有高压进气开关阀10和高压进气调节阀5,低压气瓶17与左气室气口b之间依次设置有低压进气开关阀11和低压进气调节阀6。在高压气路截止阀21与高压气瓶15之间设置有高压气瓶压力表20,在低压气路截止阀22与低压气瓶17之间设置有低压气瓶压力表23;所述高压气瓶15还与高压气瓶减压阀14相连,所述低压气瓶17还与低压气瓶减压阀16相连,所述左气室气口a还连接有左气室排气阀4。
24.气路控制系统中设置有真空泵28,所述真空泵28与负压储能瓶相连,所述负压储能瓶与右气室气口c相连通,所述真空泵28还与右气室气口d相连,无杆气缸2的右气室排气口e处有右气室排气阀9。真空泵28与负压储能瓶之间设置有抽真空开关阀25,所述负压储能瓶与右气室气口c之间设置有第一负压开关阀12,所述真空泵28与右气室气口d之间依次设置有第二负压开关阀13和真空度调节阀8, 抽真空开关阀25与负压储能瓶之间设置有负压气瓶通气阀24,所述负压储能瓶连接有负压气瓶压力表19。本技术中的无杆气缸2可选磁偶式无杆气缸。
25.上述弹射系统的弹射方法,包括如下步骤:步骤一,弹射准备阶段:将无人机安装在滑车1上,打开空压机27以及高压气路截止阀21与低压气路截止阀22,为高压气瓶15与低压气瓶17进行恒压供气,并打开第一负压开关阀12与第二负压开关阀13,开启真空泵28为负压储能气瓶18抽真空,通过pid算法控制真空度调节阀8,将负压储能气瓶18内真空度稳定在设定值(0.01mpa),当负压储能气瓶18中的真空度达到设定值后,关闭第一负压开关阀12,继续对无杆气缸的右气室抽真空至设定值(0.01mpa),当高压气瓶15、低压气瓶17及负压储能气瓶18的压力达到设定值压力后,关闭前述除真空度调节阀8和第二负压开关阀13之外的其余阀门及空压机27,完成弹射前准备工作。此时,由于右侧气室内负压存在,滑车虽被锁紧,但已经具备向前的运动趋势。本技术的步骤中,本领域技术人员知晓如何通过pid算法控制真空度调节阀8。
26.步骤二,弹射前稳压阶段:
通过pid算法控制真空度调节阀8及左气室排气阀4,在无杆气缸活塞左气室和右气室之间建立弹射压差;步骤三,弹射阶段:关闭左气室排气阀4、右气室排气阀9以及第二负压开关阀13,打开高压进气开关阀10,通过高压进气调节阀5控制流入左气室气口a的气流量,同时打开第一负压开关阀12和抽真空开关阀25;此时,闭锁机构将滑车1解锁,高压气体迅速进入无杆气缸2的左气室,在活塞左右气室压差作用下,活塞快速向前运动,经推力臂拉动增速滑轮组3牵引滑车1连带无人机在发射架上以数倍于活塞的速度向前运动,达到弹射速度后,无人机飞离发射架;步骤四,气压缓冲阶段:滑车1通过缓冲垫缓冲减速,打开左气室排气阀4和右气室排气阀9,并打开连通左右气室连通阀7,平衡气缸左气室与右气室的压力,无杆气缸同时也进入气压减速缓冲阶段,理论压力变化曲线见附图2。所述步骤四中气压缓冲阶段的工作过程具体为:关闭高压进气开关阀10、高压进气调节阀5、第一负压开关阀12、第二负压开关阀13和抽真空开关阀25,打开低压进气开关阀11,经过低压进气调节阀6,低压缓冲气体同时进入左右气室,再经左气室气口a与右气室气口e排出,达到活塞减速目的。
27.步骤五,压力平衡阶段:待活塞静止后,延时n秒,让低压气瓶17内气体同时进入活塞两侧气室,待左气室和右气室压力平衡后进入卸压阶段;步骤五中的n大于等于5秒。
28.步骤六,卸压阶段:关闭低压进气开关阀11,无杆气缸内剩余气体,经左气室排气阀4和右气室排气阀9排出,缸内压力恢复常压;启动复位电机,通过滑轨内置的牵引绳将滑车1复位,并通过闭锁机构将滑车锁定,同时,滑轮组作用下,无杆气缸的活塞也被复位,系统可进入下一次弹射准备阶段。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。