技术特征:
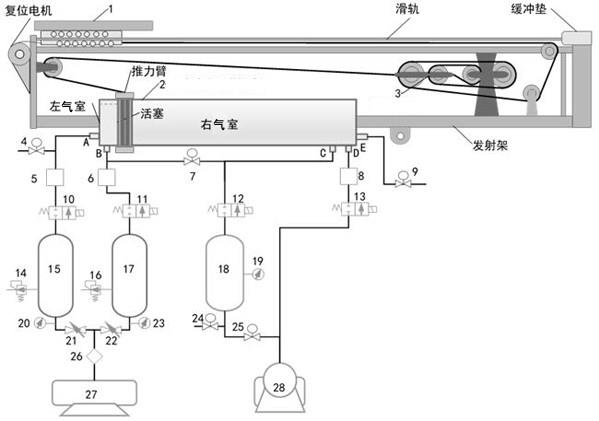
1.一种基于无杆气缸真空差压无人机气动弹射系统,其特征在于:包括机械组件和气路控制系统,所述机械组件包括无人机发射架、滑轨、滑车(1)、滑轮组(3)和无杆气缸(2),所述无人机发射架上设置有滑轨,所述滑轨与滑轮组(3)相连,所述滑轨上设置有滑车(1),所述滑轮组(3)与无杆气缸(2)相连;所述无杆气缸(2)包括活塞和位于活塞左右两侧的左气室和右气室,所述气路控制系统与无杆气缸(2)连通,且气路控制系统在弹射前对无杆气缸(2)右气室抽真空形成负压环境,并在弹射过程中一直保持右气室保持为负压环境。2.根据权利要求1所述的一种基于无杆气缸真空差压无人机气动弹射系统,其特征在于:所述气路控制系统中设置有空压机(27),所述空压机(27)连接有油水分离器(26),所述油水分离器(26)分别与高压气瓶(15)和低压气瓶(17)相连,所述高压气瓶(15)与无杆气缸(2)的左气室气口a相连通;所述低压气瓶(17)与无杆气缸(2)的左气室气口b和右气室气口c相连通。3.根据权利要求2所述的一种基于无杆气缸真空差压无人机气动弹射系统,其特征在于:所述油水分离器(26)与高压气瓶(15)之间设置有高压气路截止阀(21),所述油水分离器(26)与低压气瓶(17)之间设置有低压气路截止阀(22),所述高压气瓶(15)与左气室气口a之间依次设置有高压进气开关阀(10)和高压进气调节阀(5),低压气瓶(17)与左气室气口b之间依次设置有低压进气开关阀(11)和低压进气调节阀(6)。4.根据权利要求2所述的一种基于无杆气缸真空差压无人机气动弹射系统,其特征在于:在高压气路截止阀(21)与高压气瓶(15)之间设置有高压气瓶压力表(20),在低压气路截止阀(22)与低压气瓶(17)之间设置有低压气瓶压力表(23);所述高压气瓶(15)还与高压气瓶减压阀(14)相连,所述低压气瓶(17)还与低压气瓶减压阀(16)相连,所述左气室气口a还连接有左气室排气阀(4)。5.根据权利要求1所述的一种基于无杆气缸)真空差压无人机气动弹射系统,其特征在于:所述气路控制系统中设置有真空泵(28),所述真空泵(28)与负压储能瓶相连,所述负压储能瓶与右气室气口c相连通,所述真空泵(28)还与右气室气口d相连,无杆气缸(2)的右气室排气口e处有右气室排气阀(9)。6.根据权利要求5所述的一种基于无杆气缸真空差压无人机气动弹射系统,其特征在于:所述真空泵(28)与负压储能瓶之间设置有抽真空开关阀(25),所述负压储能瓶与右气室气口c之间设置有第一负压开关阀(12),所述真空泵(28)与右气室气口d之间依次设置有第二负压开关阀(13)和真空度调节阀(8)。7.根据权利要求6所述的一种基于无杆气缸真空差压无人机气动弹射系统,其特征在于:所述抽真空开关阀(25)与负压储能瓶之间设置有负压气瓶通气阀(24),所述负压储能瓶连接有负压气瓶压力表(19)。8.一种基于权利要求1-7任意一项所述的弹射系统的弹射方法,包括如下步骤:步骤一,弹射准备阶段:将无人机安装在滑车(1)上,打开空压机(27)以及高压气瓶(15)截止阀21与低压气瓶(17)截止阀22,为高压气瓶(15)与低压气瓶(17)进行恒压供气,并打开第一负压开关阀(12)与第二负压开关阀(13),开启真空泵(28)为负压储能气瓶(18)抽真空,控制真空度调节阀(8),将负压储能气瓶(18)内真空度稳定在设定值,当负压储能气瓶(18)中的真空度达到设定值后,关闭第一负压开关阀(12),继续对无杆气缸(2)的右气室抽真空至设定值,当
高压气瓶(15)、低压气瓶(17)及负压储能气瓶(18)的压力达到设定值压力后,关闭前述除真空度调节阀(8)和第二负压开关阀(13)之外的其余阀门及空压机(27),完成弹射前准备工作;步骤二,弹射前稳压阶段:控制真空度调节阀(8)及左气室排气阀(4),在无杆气缸(2)活塞左气室和右气室之间建立弹射压差;步骤三,弹射阶段:关闭左气室排气阀(4)、右气室排气阀(9)以及第二负压开关阀(13),打开高压进气开关阀(10),通过高压进气调节阀(5)控制流入左气室气口a的气流量,同时打开第一负压开关阀(12)和抽真空开关阀(25);此时,将滑车(1)解锁,高压气体迅速进入无杆气缸(2)的左气室,在活塞左右气室压差作用下,活塞快速向前运动,经推力臂拉动增速滑轮组(3)牵引滑车(1)连带无人机在发射架上以数倍于活塞的速度向前运动,达到弹射速度后,无人机飞离发射架;步骤四,气压缓冲阶段:滑车(1)缓冲减速,打开左气室排气阀(4)和右气室排气阀(9),并打开连通左右气室连通阀(7),平衡气缸左气室与右气室的压力,无杆气缸(2)同时也进入气压减速缓冲阶段;步骤五,压力平衡阶段:待活塞静止后,延时n秒,让低压气瓶(17)内气体同时进入活塞两侧气室,待左气室和右气室压力平衡后进入卸压阶段;步骤六,卸压阶段:关闭低压进气开关阀(11),无杆气缸(2)内剩余气体,经左气室排气阀(4)和右气室排气阀(9)排出,缸内压力恢复常压;启动复位电机,将滑车(1)复位,并将滑车(1)锁定,同时,滑轮组(3)作用下,无杆气缸(2)的活塞也被复位,系统可进入下一次弹射准备阶段。9.根据权利要求8所述的弹射方法,其特征在于:所述步骤四中气压缓冲阶段的工作过程具体为:关闭高压进气开关阀(10)、高压进气调节阀(5)、第一负压开关阀(12)、第二负压开关阀(13)和抽真空开关阀(25),打开低压进气开关阀(11),经过低压进气调节阀(6),低压缓冲气体同时进入左右气室,再经左气室气口a与右气室气口e排出,达到活塞减速目的。10.根据权利要求8所述的弹射方法,其特征在于:所述步骤五中的n大于等于5秒。
技术总结
本发明涉及无人机航空领域,尤其涉及一种基于无杆气缸真空差压无人机气动弹射系统及弹射方法,包括机械组件和气路控制系统,所述机械组件包括无人机发射架、滑轨、滑车、滑轮组和无杆气缸,无杆气缸包括活塞和位于活塞左右两侧的左气室和右气室,所述气路控制系统与无杆气缸连通,且气路控制系统在弹射前对无杆气缸右气室抽真空形成负压环境,并在弹射过程中一直保持右气室保持为负压环境。通过供气系统(真空泵、空压机、储能器以及各种控制阀)、无杆气缸与滑轮组的配合,能够实现无人机平稳加速、滑车载具快速缓冲以及复位功能。滑车载具快速缓冲以及复位功能。滑车载具快速缓冲以及复位功能。
技术研发人员:刘栋 程家林 朱阿元 曹祥 李苑 夏云云 唐茂华 赵创新
受保护的技术使用者:成都飞机工业(集团)有限责任公司
技术研发日:2022.01.14
技术公布日:2022/5/25
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。