1.本发明涉及汽车驾驶辅助技术领域,具体涉及一种基于神经网络的预见巡航控制方法。
背景技术:
2.载货汽车运行里程长、工作时间长、耗油量大,尽管重型货车占汽车保有量较低,但是其排放占比远远超过其他乘用车;而公路货运行业面临严峻的减排压力。同时,高油耗也为运营人员带来高的使用成本。
3.基于上述问题,本领域技术人员为此进行了大量的研究。例如cn110509922b公开了“一种基于高精度地图的车辆预见巡航控制方法”,基于gps和高精度地图实时预测前方路况信息,并在不同工况下对巡航车速进行自适应调节,平衡低油耗及高时效之间的关系,以节约运输成本,提高运输效率,提高车辆的燃油经济性。又如cn111532264a公开了“一种面向变坡度和变限速交通场景的智能网联汽车巡航车速优化方法”通过动态交通信息获取,并基于v2x技术,在智慧交通云获取行驶路线、道路坡度、道路限速等信息,传输至车载控制器;依据道路限速,划分优化阶段等;并利用滚动距离域优化策略实现全局问题分段滚动优化;基于动态规划的最优车速计算方法,其在每个阶段设计包含多约束和多目标的车速优化问题,采用汽车能耗模型建立能量目标函数,并采用动态规划算法优化计算安全、节能、高效的巡航车速。但是,所述现有技术都仅仅是用动态规划对车速进行规划;并且,采用的方法对控制器算力要求高,计算时间较长。
技术实现要素:
4.针对现有技术存在的上述不足,本发明的目的在于提供一种基于神经网络的预见巡航控制方法,解决现有技术汽车驾驶耗油量高,对控制器算力要求高的问题。
5.为实现上述目的,本发明采用如下技术方案:
6.一种基于神经网络的预见巡航控制方法,其特征在于,包括以下步骤:
7.步骤1、采用动态规划的方法对巡航车速进行规划
8.1)获取高精地图的道路信息
9.通过高精度地图得到道路的坡道信息、道路曲率信息、限速信息;
10.2)道路重构
11.将道路对坡道信息进行聚类分析,将其分成五个等级的坡度;
12.路网重构分类坡度等级道路属性
ɑ
≤1.2
ɑ
dw
1陡下坡1.2
ɑ
dw
≤
ɑ
<
ɑ
dw
2平缓下坡
ɑ
dw
≤
ɑ
<
ɑ
up
3平直道路
ɑ
up
≤
ɑ
<1.2
ɑ
up
4平缓上坡1.2
ɑ
up
≤
ɑ
5陡上坡
13.3)利用动态规划的方法对巡航车速进行规划;
14.4)动态规划方法计算规划速度曲线;
15.步骤2、采用bp(backpropagation)神经网络进行训练;在神经网络的训练中,输入层为高精地图得到下一时刻道路坡度信息、下一时刻道路弯道信息、设定巡航车速值、当前车速信息。
16.步骤3、对bp神经网络的训练结果进行应用
17.基于训练后的结果,采用bp神经网络,根据当前时刻高精地图得到的前方坡道信息、前方弯道信息、以及自车的车速信息与巡航设定车速,得到实时的车速规划。
18.相比现有技术,本发明具有如下有益效果:
19.1、本发明通过采集实际的路况信息,在离线环境下采用动态规划的方法对车辆巡航的车速进行规划,离线数据作为神经网络训练的样本。因此,比采用动态规划实时规划速度效率更好,对控制器算力要求低;并且,采用神经网络训练得到效率更高。
20.2、本发明不仅可以使驾驶员在中远距离轻松驾驶并且保持较低的油耗,同时达到实时控制的目的。
附图说明
21.图1是本发明动态规划速度规划流程图;
22.图2是本发明bp神经网络速度规划拓扑图;
23.图3是本发明动态规划算法仿真结果示意图;
24.图4是发动机万有特性map图。
具体实施方式
25.为了使本领域技术人员更好地理解本发明的技术方案,下面结合具体实施例对本发明作进一步的说明,但本发明的实施方式不仅限于此。
26.一种基于神经网络的预见巡航控制方法,包括以下步骤:
27.步骤1、采用动态规划的方法对巡航车速进行规划
28.动态规划方法将系统整个过程的优化策略分解成系统逆向计算的一个单步优化子问题,从最后一段向前逆推计算,逐段找出最优能耗对应的速度曲线。
29.1)获取高精地图的道路信息
30.需要通过高精度地图得到道路的坡道信息、道路曲率信息、限速信息。
31.2)道路重构
32.将道路对坡道信息进行聚类分析,将其分成五个等级的坡度。
33.路网重构分类坡度等级道路属性
ɑ
≤1.2
ɑ
dw
1陡下坡1.2
ɑ
dw
≤
ɑ
<
ɑ
dw
2平缓下坡
ɑ
dw
≤
ɑ
<
ɑ
up
3平直道路
ɑ
up
≤
ɑ
<1.2
ɑ
up
4平缓上坡1.2
ɑ
up
≤
ɑ
5陡上坡
34.3)利用动态规划的方法对巡航车速进行规划
35.参见图1,动态速度规划流程包括:
36.31)每个样本对道路信息长度为2km,以2km的长度进行一次规划作为一个训练样本。其中以10m为一个车速控制点;2km范围内有n个车速控制点。
37.32)设定巡航车速为spd_set,以δv为速度离散间隔,预测巡航车速上限v_max;预测巡航车速下限v_min。
38.v_max和v_min为巡航车速的上下限制,以该上下边界将速度离散化为可规划的速度值。
39.33)动态规划的目标函数为油耗和行驶时间之和最小,目标函数方程为:
40.j=k1*bn/b
ref
k2*tn/t
ref
(k1 k2=1)
41.bn=l
fuel
f1(grar) f2(vk) f3(vk)
42.其中,
43.k1为经济性权重系数;k2实时性权重系数;
44.b
ref
为以巡航车速匀速行驶的油耗(g);
45.tn为车辆行进单位距离s的时间(s);
46.t
ref
为以巡航车速行进单位距离s的时间(s);
47.f1(grar)、f2(vk)、f3(vk)分别为换挡惩罚函数(g)、驾驶性惩罚函数(g)和巡航车速偏差惩罚函数(g);
48.l
fuel
为根据发动机燃油特性计算得到的油耗(g)。
49.4)动态规划方法计算规划速度曲线
50.41)最后一列节点按照速度区间分配不同初始的总能耗;
51.42)从后向前累计计算,计算当前节点转移到下一个节点的能耗值,即目标函数方程,通过状态转移得到的目标函数累加下一个节点存储的总能耗得到当前节点转移到下一节点所需能耗值;
52.43)将总能耗值最小的点进行保存,记录在当前节点位置处,并可以得到下一节点的速度值;
53.44)依次递推可得到1km道路长度下,所有可能的初始速度下最优的速度网络;
54.45)正向给出初始速度,根据当前车速查阅车速动态值(参见图1表格)得到最优能耗的速度规划曲线;
55.其中,在44)中会得到一系列最优的速度网络,可以根据当前的速度值和高精地图的坡道信息,可以得到一个最优速度规划值。
56.步骤2、采用bp(backpropagation)神经网络进行训练,将步骤1中利用动态规划算法得到的规划速度进行保存,作为bp神经网络的训练样本。
57.bp神经网络是一种按照误差逆向传播算法训练的多层前馈神经网络,是应用最广泛的神经网络模型之一;主要用于处理非线性问题,利用bp神经网络来做数据的预测。
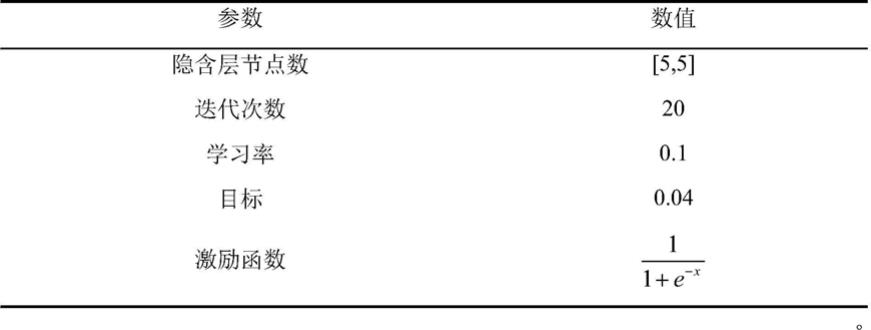
58.本发明采用双隐含层的bp神经网络。在神经网络的训练中,输入层为高精地图得到下一时刻道路坡度信息、下一时刻道路弯道信息、设定巡航车速值、当前车速信息。设定每个隐含层的节点都是5。输出层为下一时刻的规划车速。输出层即神经网络的训练结果。隐含层可以认为是bp神经网络训练的黑匣子,认为是除输入和输出层以外逻辑层的总称。节点可以认为是其中间层参数设置。
59.参见图2为bp神经网络速度规划拓扑图。隐含层可以认为是bp神经网络对输入信号的处理逻辑的离散节点,输出层即bp神经网络的输出信号。
60.参见表1,神经网络的参数设置。
61.神经网络训练的主要流程如下:
62.(1)网络初始化。输入层n=4,隐含层q=[5,5],m=1。ω
ij
表示输入层和隐含层之间的权重,ω
jk
表示隐含层和输出层之间的权重。
[0063]
(2)计算隐含层,如公式6.1所示。
[0064][0065]
式中,其中hj是隐含层的输出;aj是隐含层第j个神经元的阈值;f是激励函数,激励函数有多种表达式。
[0066]
(3)计算输出层,如公式6.2所示。
[0067][0068]
式中,ok为神经网络的输出;bk为输出层第k个神经元的阈值。
[0069]
(4)误差计算及权值更新,如公式6.3所示。
[0070][0071]
式中,ek为网络预测误差;yk为期望输出值;η为学习速率。
[0072]
(5)阈值更新,如公式6.4所示。
[0073][0074]
表1神经网络的参数
[0075][0076]
步骤3、对bp神经网络的训练结果进行应用
[0077]
bp神经网络的预测精度受多参数影响,如训练样本的大小、隐含层节点的选取和训练的迭代次数等。
[0078]
参见图3,本发明动态规划算法仿真结果包括a\b\c\d,图a为规划的车速(仿真结果);图b为仿真设置坡度(已知);图c为挡位变化(仿真结果);图d为请求转速和扭矩值(仿真结果)。图4为根据图d绘制的发动机万有特性图,说明预见巡航会改变巡航时的发动机工作点,达到节能省油的目的。
[0079]
在样本数量足够大的情况下,训练样本覆盖实车行驶的工况场景。基于训练后的结果,采用bp神经网络,根据当前时刻高精地图得到的前方坡道信息、前方弯道信息、以及自车的车速信息与巡航设定车速,得到实时的车速规划。综上,采用本发明基于神经网络可以将动态规划的结果进行训练,基于动态规划的结果,可以实现实时控制的预见性巡航。
[0080]
最后需要说明的是,以上实施例仅用以说明本发明的技术方案而非限制技术方案,本领域的普通技术人员应当理解,那些对本发明的技术方案进行修改或者等同替换,而不脱离本技术方案的宗旨和范围,均应涵盖在本发明的权利要求范围当中。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。
