1.本发明涉及供电领域,具体是一种电杆防攀爬装置。
背景技术:
2.随着电网的不断发展和人民需求的不断提高,配电线路已延伸到城市和农村的各个角落。在人烟稀少的农村或偏远地区、林区,也陆续出现配网线路。电杆是配电线路的主要设施之一,支撑着配电线路在高空安全运行。
3.然而,在上述地区实际应用中,经常有小动物(如小松鼠等)沿着杆体爬上电杆顶端,引发配电线路故障,影响电网的安全运行。针对上述情况,本技术提出了一种防攀爬装置以防止小动物攀爬至电杆顶端处。
技术实现要素:
4.为了解决现有技术中经常有小动物爬至电杆顶端处影响电网安全运行的技术问题,本发明提供了一种电杆防攀爬装置,解决了上述技术问题。
5.本发明解决其技术问题所采用的技术方案是:
6.本发明提供了一种电杆防攀爬装置,用于配电线路电杆,包括:伞结构模块,所述伞结构模块包括设置在所述电杆杆体上的伞面、与所述伞面配合的伞骨以及用于撑开所述伞面且在竖直方向上滑动地配合在所述电杆杆体上的伞巢主体;驱动模块,所述驱动模块设置在所述电杆杆体上,所述驱动模块包括驱动所述伞巢主体在所述电杆杆体上滑动的驱动组件和控制所述驱动组件启停的控制芯片;触发模块,所述触发模块包括环绕在所述电杆杆体上的电极环,所述电极环与所述控制芯片电气连接。
7.进一步地,所述驱动组件包括:齿条,所述齿条与所述伞巢主体固定连接且在竖直方向上滑动地配合在所述电杆杆体上;驱动电机,所述驱动电机固定地连接在所述电杆杆体上,且所述驱动电机的驱动轴上设置有与所述齿条啮合的驱动齿轮。
8.进一步地,所述齿条通过滑轨配合在所述电杆杆体上,所述滑轨竖直地设置在所述电杆杆体的外壁上。
9.进一步地,所述齿条靠近地面的一端设置有防止齿条掉落的限位块。
10.进一步地,所述驱动电机在所述电杆杆体的径向方向上突出于所述齿条,且所述伞面收拢时所述伞面的下沿正好抵靠至所述驱动电机的外壳上。
11.进一步地,所述电极环在所述滑轨处设置有让位部。
12.进一步地,所述伞巢主体通过滑动套配合在所述电杆杆体上,所述滑动套固定地连接在所述电杆杆体上。
13.进一步地,所述滑动套的两端设置有用于限位的台阶。
14.进一步地,所述控制芯片上配置有蓄电池。
15.进一步地,还包括供电模块,所述供电模块包括设置在所述电杆杆体上的太阳能板,所述太阳能板用于给所述蓄电池充电。
16.基于上述技术方案,本发明所能实现的技术效果为:
17.本发明的电杆防攀爬装置在电杆上设置有伞结构模块,伞结构模块优先设置在电杆的中段,当小动物(如小松鼠等)沿着电杆向上攀爬至触发模块的电极环处时,驱动模块的控制芯片就会收到信号从而启动驱动组件,驱动组件启动后带动伞结构模块的伞巢主体运动,从而撑开伞面。一般情况下,打开的瞬间小松鼠就会收到惊吓并跑开,即使没有跑开,撑开的伞面使得小松鼠无法继续向上攀爬,从而解决了现有技术中经常有小动物爬至电杆顶端影响电网安全运行的技术问题。
附图说明
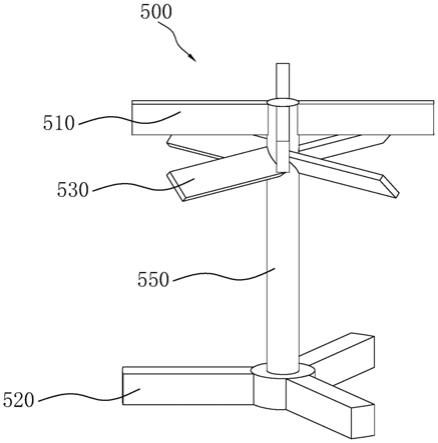
18.图1是本发明的电杆防攀爬装置的整体结构示意图;
19.图2是本发明的电杆防攀爬装置的伞面撑开时的半体剖面图;
20.图3是本发明的电杆防攀爬装置的伞面收拢时的半体剖面图;
21.图4是图3中a部分的局部放大图。
22.其中:1-伞结构模块,11-伞面,12-伞骨,13-伞巢主体,14-滑动套,141-台阶;2-驱动模块,21-驱动组件,211-齿条,212-驱动电机,213-驱动齿轮,214-滑轨,215-限位块,22-控制芯片;3-触发模块,31-电极环,311-让位部;4-供电模块,41-太阳能板。
具体实施方式
23.下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。
24.需要注意的是,这里所使用的术语仅是为了描述具体实施方式,而非意图限制根据本技术的示例性实施方式。如在这里所使用的,除非上下文另外明确指出,否则单数形式也意图包括复数形式,此外,还应当理解的是,当在本说明书中使用术语“包含”和/或“包括”时,其指明存在特征、步骤、操作、器件、组件和/或它们的组合。
25.在本发明的描述中,需要理解的是,方位词如“前、后、上、下、左、右”、“横向、竖向、垂直、水平”和“顶、底”等所指示的方位或位置关系通常是基于附图所示的方位或位置关系,仅是为了便于描述本发明和简化描述,在未作相反说明的情况下,这些方位词并不指示和暗示所指的装置或元件必须具有特定的方位或者以特定的方位构造和操作,因此不能理解为对本发明保护范围的限制;方位词“内、外”是指相对于各部件本身的轮廓的内外。
26.为了便于描述,在这里可以使用空间相对术语,如“在
……
之上”、“在
……
上方”、“在
……
上表面”、“上面的”等,用来描述如在图中所示的一个器件或特征与其他器件或特征的空间位置关系。应当理解的是,空间相对术语旨在包含除了器件在图中所描述的方位之外的在使用或操作中的不同方位。例如,如果附图中的器件被倒置,则描述为“在其他器件或构造上方”或“在其他器件或构造之上”的器件之后将被定位为“在其他器件或构造下方”或“在其他器件或构造之下”。因而,示例性术语“在
……
上方”可以包括“在
……
上方”和“在
……
下方”两种方位。
27.在电网的运行过程中,经常有小动物(如小松鼠等)沿着电杆攀爬至杆顶的高压电线处触电死亡,并引发电网故障,影响电网的安全运行。
28.如图1-4所示,本发明提供了一种电杆防攀爬装置,用于配电线路的电杆,包括伞
结构模块1、驱动模块2和触发模块3,伞结构模块1包括设置在电杆杆体上的伞面11、与伞面11配合的伞骨12以及用于撑开伞面11且在竖直方向上滑动地配合在电杆杆体上的伞巢主体13,驱动模块2设置在电杆杆体上,驱动模块2包括驱动伞巢主体13在电杆杆体上滑动的驱动组件21和控制驱动组件21启停的控制芯片22,触发模块3包括环绕在电杆杆体上的电极环31,电极环31与控制芯片22电气连接。
29.本发明的电杆防攀爬装置在电杆上设置有伞结构模块1,伞结构模块1优先设置在电杆的中段,当小动物,本处以小松鼠为例,沿着电杆向上攀爬至触发模块3的电极环31处时,小松鼠的前爪和后爪分别踩在电极环31的不同电极上,弱电将小松鼠的身体作为导体形成闭环,驱动模块2的控制芯片22就会收到信号从而启动驱动组件21,驱动组件21启动后带动伞结构模块1的伞巢主体13运动,从而撑开伞面11,伞面11撑开的瞬间小松鼠就会受到惊吓并跑开,即使没有跑开,撑开的伞面11也阻隔在了小松鼠行进的道路上,使得小松鼠无法继续向上攀爬,从而解决了现有技术中经常有小动物爬至电杆顶端,引发电网线路故障,影响电网安全运行的技术问题。
30.为了使伞巢主体13在竖直方向上更好地滑动配合在电杆杆体上,伞巢主体13通过滑动套14配合在电杆杆体上,滑动套14固定地连接在电杆杆体上,具体地,由于电杆杆体是下粗上细的结构,滑动套14的内壁与电杆杆体形状相适应以保证配合在滑动套14的外壁面上的伞巢主体13是在竖直方向上运动的,同时滑动套14的外壁为光滑的壁面以确保伞巢主体13的运动不卡滞。
31.进一步地,滑动套14的两端设置有用于限制伞巢主体13活动范围的台阶141。
32.在本发明的一个具体实施例中,驱动模块2的驱动组件21包括齿条211和驱动电机212,齿条211与伞巢主体13固定连接且滑动地配合在电杆杆体上,驱动电机212固定地连接在电杆杆体上,且驱动电机212的驱动轴上设置有与齿条211啮合的驱动齿轮213。
33.进一步地,齿条211通过滑轨214配合在电杆杆体上,滑轨214竖直地设置在电杆杆体的外壁上。
34.进一步地,齿条211靠近地面的一端设置有防止齿条211掉落的限位块215,在本实施例的一个优选方案中,齿条211落至限位块215处时,伞巢主体13也正好运动至滑动套14下端的台阶141处。
35.为了保护伞面11,驱动电机212在电杆杆体的径向方向上突出于齿条211,当伞面11收拢时伞面11的下沿正好抵靠至驱动电机212的外壳上从而避免直接与齿条211的接触。
36.在本实施例中电极环31在滑轨214处设置有让位部311,以形成让位空间供滑轨214和齿条211通过,具体地,让位部311可以是一个在径向方向上抛空的拱桥结构。
37.为了使驱动组件21随时都能进入工作状态,控制芯片22上配置有蓄电池。
38.进一步地,还包括供电模块4,供电模块4包括设置在电杆杆体上的太阳能板41,太阳能板41用于给蓄电池充电。
39.在本发明的一个优选方案中,电极环31为两个,一正一负,两个电极环31在竖直方向设置有一定的宽度,这样,小松鼠在往上攀爬的时候,小松鼠的前脚和后脚正好同时触碰到两个不同的电极环31。
40.需要注意的是,为了方便工作人员的攀爬,本发明的防攀爬装置的伞面11和滑轨214在竖直方向上的所占用的竖直距离略小于一个操作人员的攀爬步距离,且配有额外的
遥控器,通过遥控器的控制可使伞面11处于收拢状态。
41.需要补充的是,在驱动模块2中,驱动电机212优选为伺服电机,伺服电机根据反馈信息的不同分为两种控制方式,在反馈量为直线距离的方式中,伺服电机被选择为带有位置传感器的伺服电机,位置传感器用于检测齿条211在竖直方向上的位置,当齿条211运动至伞面11撑开时,伺服电机保持受电但不转动的状态一段时间以使伞面11保持撑开状态,而后伺服电机反转使齿条211向下运动至伞面11收拢;在反馈量为伺服电机输出轴转数的方式中,伺服电机的输出轴转动圈数被设置为固定值,这种方式需要配合在不通电时能自由下落的齿条211,如金属制齿条211或者是主体为塑料下端有配重块的齿条211,具体地,伺服电机的输出轴先转动固定圈数使伞面11撑开,而后伺服电机保持受电但不转动的状态一段时间以使伞面11保持撑开状态,而后伺服电机失电,连接在输出轴上驱动齿轮213无法保持,齿条211反向推动驱动齿轮213并自由下落至下极限位。
42.本发明的防攀爬装置的工作原理如下:当电极环31上有小动物时,控制芯片22收到电极环31传递过来的信号,控制芯片22开启驱动电机212将伞面11撑开以促使小动物离开,而后伞面11保持撑开状态一段时间以确保小动物无法继续攀爬,而后伞面11收拢完成一次信号动作。
43.应当理解,以上所描述的具体实施例仅用于解释本发明,并不用于限定本发明。由本发明的技术方案所引伸出的显而易见的变化或变动仍处于本发明的保护范围之中。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。