技术特征:
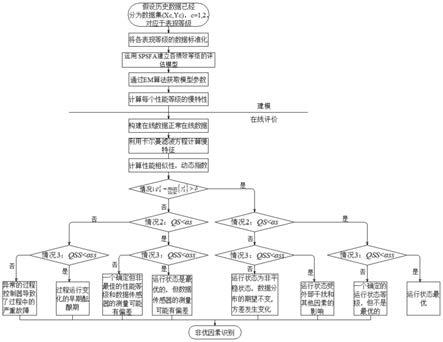
1.一种基于监督概率慢特征分析的工业过程运行状态评价方法,其特征在于,包括以下步骤:步骤一:利用spsfa算法,进行静-动态特性协同感知信息挖掘,建立运行状态评价的离线评价模型;s11:收集生产过程时产生的数据,并将数据分为输入矩阵x∈r
n
×
m
和输出矩阵y∈r
n
,其中,n是样本个数,m是变量个数,r为实数集,r
n
×
m
表示n
×
m维的实数矩阵;s12:对输入矩阵x的各列进行零均值和单位方差处理,记为输入矩阵x
a
,并把每一列时间上连续的两个输入数据点之间的差,记为δx
a
;对输出数据矩阵y也进行标准化处理,记为输出矩阵y
a
;s13:对输入矩阵x
a
、输出矩阵y
a
和矩阵δx
a
运行spsfa算法,具体过程如下:a1:初始化spsfa模型参数,根据公式(1)对输入矩阵x
a
的协方差进行奇异值分解;a2:根据公式(1)将原始输入x
a
球化,根据公式(2)计算白化矩阵q;式中,cov(z)=<zz
t
>
t
=i
m
,s=pz,<ss
t
>
t
=i
m
;a3:根据公式(3)对矩阵的协方差进行奇异值分解;式中,p=[p1…
p
m
]
t
正交;a4:根据公式(4)求得负载矩阵w
x
;w
x
=pq=pλ-1/2
u
t
ꢀꢀꢀ
(4);a5:根据公式(5)求解慢特征s;s
a
=w
x
x
a
ꢀꢀꢀꢀ
(5);a6:令y
a
中任意一列等于初始u
a
;s
a
中任选一列等于初始r
a
;a7:根据公式(6)计算负载向量w
a
;a8:根据公式(7)将负载向量w
a
标准化;a9:根据公式(8)将s
a
投影到w
a
,得到s
a
的得分t
a
;t
a
=s
a
w
a
ꢀꢀꢀꢀ
(8);a10:根据公式(9)求解向量c
a
;a11:根据公式(10)对c
a
做标准化处理;
a12:根据公式(11)重新计算u
a
;a13:根据a12中的u
a
与a6步的u
a
是否相同或精度是否已达到要求;若已收敛,则执行a13,否则,执行a7;a14:根据公式(12)计算矩阵s的负载向量p
a
;a15:根据公式(13)计算成分u
a
关于t
a
的回归系数b
a
;a16:根据公式(14)求取残差矩阵x
a 1
;根据公式(15)求取残差矩阵y
a 1
;;a17:将s
a
、y
a
替换为s
a 1
、y
a 1
,从步骤a6到a16迭代,并依据公式(16)直到提取出负载矩阵w
y
;w
y
=pr
t
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(16);a18:依据公式(17)和(18)计算输入矩阵x
a
、输出矩阵y
a
的初始噪声误差;δ
x
=x
a-w
x
x
a
ꢀꢀꢀꢀꢀꢀꢀ
(17);δ
y
=y
a-w
y
y
a
ꢀꢀꢀꢀꢀꢀꢀꢀ
(18);a19:将w
x
、w
y
作为spsfa模型的初始负载矩阵,将δ
x
、δ
y
作为spsfa模型的初始噪声矩阵,将ω作为spsfa模型的初始转移概率矩阵,至此完成对spsfa模型参数的初始化;a20:根据em算法对spsfa的模型参数θ={λ,b,σ0}进行训练,其中b=[w
x
w
y
],σ0=[δ
x
δ
y
];a21:首先进行em算法中的e步,根据公式(19)、(20)和(21),对前向递归公式初始化;μ1=k1x(1)
ꢀꢀꢀꢀꢀꢀꢀ
(19);v1=i-k1h
ꢀꢀꢀꢀꢀꢀꢀ
(20);k=h
t
(hh
t
σ0)-1
ꢀꢀꢀꢀꢀꢀꢀꢀ
(21);式中,h=b,f=diag{λ1,
…
,λ
q
},x(1)为输入矩阵x
a
的初始时刻数据;a22:根据公式(22)、(23)、(24)和(25),对spsfa模型进行前向递归训练;直至输入矩阵x
a
的每一时刻数据都已进行训练,至此完成模型前向递归训练;p
t-1
=fv
t-1
f
t
γ
ꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(22);
μ
t
=fμ
t-1
k
t
[x(t)-hfμ
t-1
]
ꢀꢀꢀꢀꢀꢀ
(23);v
t
=(i-k
t-1
h)p
t-1
ꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(24);k
t
=p
t-1
h
t
(hp
t-1
h
t
σ)-1
ꢀꢀꢀꢀꢀꢀꢀꢀ
(25);式中,p(s(t)|x(1),
…
,x(t),θ
old
)~n(μ
t
,p
t
);a23:根据公式(26)和(27),对后向递归公式初始化;对后向递归公式初始化;a24:根据公式(28)、(29)和(30),对spsfa模型进行后向递归训练;直至输入矩阵x
a
的每一时刻数据都已进行训练,至此完成模型后向递归训练;至此完成模型后向递归训练;j
t
=v
t
f
t
p
t-1
ꢀꢀꢀꢀꢀꢀ
(30);a25:通过步骤a21至a24已完成em算法中的e步,依据公式(31)求spsfa模型的最大似然估计函数的期望;a26:依据公式(32),求e{l(θ)}对b的偏导数,并计算其极值;a27:依据公式(33),求e{l(θ)}对σ0的偏导数,并计算其极值;a28:依据公式(34)求e{l(θ)}对λ
j
的偏导数,并计算其极值;a29:根据前行递归和后向递归得到的参数带入到公式(32)、(33)和(34),求得spsfa的模型参数θ={λ,b,σ0},至此完成spsfa的模型训练;
a30:根据公式(35)计算各个状态的得分向量s(t);式中,a=diag{λ1,
…
,λ
j
},o(t)=[x
a
y
a
];步骤二:根据离线评价模型计算在线数据的得分向量,并计算静态、一阶动态评价指标和二阶动态指标;s20:构建时序增广矩阵后进行标准化预处理,并将标准化的数据记为s21:在离线评价模型中引入在线样本数据x(t),并根据公式(36)计算在线样本的得分向量s(t);s(t)=as(t-1) k
x
[x(t)-b
x
as(t-1)]
ꢀꢀꢀꢀꢀꢀ
(36);式中,为x
a
对应的发射矩阵,为x
a
对应的卡尔曼滤波增益矩阵;s22:对在线样本数据得分向量进行时序增广,计算在线数据得分向量的一阶差分,得到s23:根据公式(37)计算得分向量与各个与质量相关集合的状态等级中心距离根据公式(37)计算得分向量与各个与质量相关集合的状态等级中心距离式中,为各个稳态的得分向量;s24:根据公式(37)利用定义在线数据相对于各个状态等级的静态评价指标定义在线数据相对于各个状态等级的静态评价指标s25:根据公式(39)和(40)计算得分向量一阶动态指标;根据公式(39)和(40)计算得分向量一阶动态指标;式中,为时间导数的协方差矩阵;s26:根据公式(41)、(42)和(43)计算得分向量二阶动态指标;根据公式(41)、(42)和(43)计算得分向量二阶动态指标;根据公式(41)、(42)和(43)计算得分向量二阶动态指标;s27:根据评价指标对过程运行状态进行在线评价;
①
当且q
s
<α
s
时,若q
ss
<α
ss
成立,表示运行状态为优;
②
当且q
s
<α
s
时,若q
ss
<α
ss
不成立,则表示运行状态处于一个固定状态,但不是最优状态;
③
当但q
s
<α
s
不成立时,若q
ss
<α
ss
成立,则表示运行状态受外界干扰以及其他因素影响;
④
当但q
s
<α
s
不成立时,若q
ss
<α
ss
不成立,则表示运行状态为非平稳状态,异常数据分布不变,方差发生变化;
⑤
当不成立但q
s
<α
s
成立时,若q
ss
<α
ss
成立,则表示运行状态处于最优,但是数据传感器的测量可能有偏差;
⑥
当不成立但q
s
<α
s
成立时,若q
ss
<α
ss
不成立,则表示运行状态处于一个固定状态,但不是最优状态,并且数据传感器的测量可能有偏差;
⑦
当不成立且q
s
<α
s
不成立时,若q
ss
<α
ss
成立,则表示处于过程运行变化的早期酝酿期;
⑧
当不成立且q
s
<α
s
不成立时,若q
ss
<α
ss
不成立,则表示异常的过程控制器导致了过程中的严重故障。
技术总结
本发明提供了一种基于监督概率慢特征分析的工业过程运行状态评价方法,步骤一:利用监督概率慢特征分析算法,进行静-动态特性协同感知信息挖掘,建立运行状态评价的离线评价模型,实现对工业过程运行静-动态协同感知和运行状态评价信息的深度提取;步骤二:根据离线评价模型计算在线数据的得分向量,并计算静态、一阶动态评价指标和二阶动态指标,最后完成对过程稳态、隐态、非稳态和过渡态的综合评价。该方法能有效解决了传统工业过程运行状态评价方法对过程信息提取不准确、对数据中的无益信息缺乏评估的问题,其可以实现对过程运行状态的综合评价,且对过程状态认知更加准确,可有效降低误报、漏报发生的几率。漏报发生的几率。漏报发生的几率。
技术研发人员:褚菲 葛茹 许杨 莫双双 廖霜霜 何大阔 王福利
受保护的技术使用者:中国矿业大学
技术研发日:2022.02.22
技术公布日:2022/5/25
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。