1.本发明涉及路径规划技术领域,特别是涉及基于事故风险成本的驾驶路径规划方法及系统。
背景技术:
2.本部分的陈述仅仅是提到了与本发明相关的背景技术,并不必然构成现有技术。
3.先进的驾驶辅助系统能够为驾驶员提供路线规划、智能引导,是提高交通路网运行效率,缓解城市道路交通拥堵,规避出行风险的重要手段之一。但常规的路径规划多以行驶里程或行驶时间最小作为优化目标,立足于道路事故风险成本的研究相对较少。
4.近年来,在事故风险方面的研究成果较多,大体上可分为两类:
5.1)基于交通事故数据,利用贝叶斯网络、事故率法等方法开展的道路交通安全评价研究;
6.2)以人、车、路及环境等特性为基础建立指标评价体系,结合层次分析法(ahp)、熵权法、模糊评价法等方法开展的交通事故风险评价研究。
7.利用交通事故数据研究道路交通安全方面,anthony等基于公路交通事故数据,利用德尔菲技术与贝叶斯网络结合的模型进行事故率预测,评价国家公路交通安全;chu利用有序logit模型对高速公路长途行驶的大型客车所发生的严重事故进行事故致因分析,研究发现疲劳驾驶、驾驶员或乘客未系安全带、酒后驾驶等因素对事故严重程度有显著影响;mohan等基于6个城市的致死交通事故数据,利用事故率法对城市交通安全进行评价,研究发现,交通事故中死亡人数绝大部分为弱势交通群体(行人和自行车、电动车、摩托车使用者);eusofe等、gomes等基于交通事故数据,从交通管理层面对道路交通安全进行评价。基于人、车、路及环境等特性构建事故风险评价指标方面,li等,zhao等通过文献研究、专家咨询确定道路危险货物运输风险评价指标体系,使用层次分析法(ahp)评价危货品运输风险情况;fernandez j.j.等利用问卷调查的方式让马尼拉535名驾驶员对影响道路事故的因素指标(如:驾驶员不良驾驶行为、交通标志掌握程度、分心驾驶等)进行排序打分,结合层次分析法(ahp)确定各指标权重,结果表明,驾驶员的不良驾驶行为是导致交通事故的主要原因;temrungsie等根据联合国道路安全白皮书建立道路安全评价指标体系,调查了100名从事交通相关行业的专家对指标进行打分,利用层次分析法(ahp)分析道路交通安全影响因素,发现交通管理混乱,须加强交通法规的执行;cai等基于车辆驾驶行为数据建立道路交通安全风险预估指标体系,提出了基于熵权法的道路交通安全熵计算方法,并利用k-means聚类对道路交通安全风险等级进行了划分;guo等通过驾驶模拟实验采集驾驶员眼动状态和车辆运行状态数据,构建驾驶员行为指标体系,采用主成分分析法对指标进行简化,最后利用熵权法计算特征指标权重,评价驾驶员行为对交通安全的影响。
8.现有路径规划研究中关于路径选择的影响因素大多侧重于最小化行驶里程和行程时间,但很少考虑驾驶员的性格特点、出行目的以及道路环境等因素。驾驶员选择出行路径的标准不是固定不变的,所以其“最优”的含义也是狭隘的,模型推荐的路径不一定满足
驾驶员期望。因此,很多学者将影响驾驶员选择的因素纳入到路径规划模型中:grantham利用模糊神经网络方法训练驾驶员的历史路线数据,据此反映驾驶员出行偏好,为车载导航设备的出行路线选择提供指导;lee通过离散选择分析估计驾驶员因不良出行行为造成的延误,再比较不同路径的行程时间,为驾驶员推荐旅行时间更可靠的路径。然而,影响驾驶员出行选择的因素众多,其中考虑交通安全的路径诱导日益受到学者重视,karim通过分析交通冲突与碰撞之间的关系,建立了融合路径旅行时间和安全性的最短路径模型;payyanadan利用老年驾驶员的碰撞事故数据量化老年驾驶员左转、掉头和行程距离等事故风险指标,基于此评估行驶路径的安全程度,协助老年驾驶员选择更加安全的出行路径,降低老年驾驶员的事故风险;张惠玲根据交通量和通行能力等参数,建立路径旅行时间和事故风险成本的预测模型,从广义出行费用角度出发,设计不同风险倾向驾驶员的路径规划算法。
9.从上述内容可以看出,众多学者在事故风险和路径规划方面做了大量研究,但仍存在一定的不足:
10.1)基于交通事故数据的道路交通安全评价研究,利用的是事故发生后的统计数据,能够对事故发生后道路交通安全状态进行评价,但事故发生前的预防预控更加重要,此类方法缺少了事故发生前的风险预估;
11.2)以人、车、路、环境等物理特性建立指标体系的道路运输风险研究,大多结合客观分析和主观评价,通过问卷调查、专家打分、层次分析模型评定风险状态。然而,问卷调查的方式存在较大的主观性,受打分专家的风险偏好和经验影响较大,主观性强,缺少数据支撑导致得到的评价不够准确客观。
12.而在路径规划研究方面,常规的路径诱导系统往往将行驶里程或行程时间最小作为最优目标,虽然已有考虑驾驶员选择偏好和行驶安全的路径诱导研究,但立足于道路事故风险成本构建路径诱导模型的研究依然较少。
技术实现要素:
13.为了解决现有技术的不足,本发明提供了基于事故风险成本的驾驶路径规划方法及系统;本发明依据交通事故数据,从事故特征出发构建风险评价体系,建立基于熵权法的事故风险量化模型,设计综合考虑风险成本和通行时间的路径规划算法,以期为驾驶员出行进行路线指引,提高行驶安全性。
14.第一方面,本发明提供了基于事故风险成本的驾驶路径规划方法;
15.基于事故风险成本的驾驶路径规划方法,包括:
16.获取历史交通事故数据,对数据进行预处理;
17.根据历史交通事故数据,建立事故风险成本评价指标体系;
18.确定各指标权重,根据事故风险量化模型,确定各路段事故风险成本;
19.构建算例网络,基于起点、终点、各路段事故风险成本和各路段旅行时间,采用k条最短路径求解算法,得到最优路径。
20.第二方面,本发明提供了基于事故风险成本的驾驶路径规划系统;
21.基于事故风险成本的驾驶路径规划系统,包括:
22.获取模块,其被配置为:获取历史交通事故数据,对数据进行预处理;
23.评价指标体系建立模块,其被配置为:根据历史交通事故数据,建立事故风险成本评价指标体系;
24.事故风险成本确定模块,其被配置为:确定各指标权重,根据事故风险量化模型,确定各路段事故风险成本;
25.最优路径求解模块,其被配置为:构建算例网络,基于起点、终点、各路段事故风险成本和各路段旅行时间,采用k条最短路径求解算法,得到最优路径。
26.第三方面,本发明还提供了一种电子设备,包括:
27.存储器,用于非暂时性存储计算机可读指令;以及
28.处理器,用于运行所述计算机可读指令,
29.其中,所述计算机可读指令被所述处理器运行时,执行上述第一方面所述的方法。
30.第四方面,本发明还提供了一种存储介质,非暂时性地存储计算机可读指令,其中,当所述非暂时性计算机可读指令由计算机执行时,执行第一方面所述方法的指令。
31.第五方面,本发明还提供了一种计算机程序产品,包括计算机程序,所述计算机程序当在一个或多个处理器上运行的时候用于实现上述第一方面所述的方法。
32.与现有技术相比,本发明的有益效果是:
33.本发明基于交通事故数据建立事故风险评价体系,构建了基于人-车-路-环境多因素的事故风险成本量化模型,利用熵权法计算各指标权重,确定路段事故风险;然后,基于改进的k条最短路径算法设计了综合考虑风险成本和通行时间的路径规划模型。本发明结论如下:
34.1)基于历史事故数据构建风险指标评价体系,采用熵权法计算指标权重,提出的事故风险成本计算模型,实现了车辆行驶风险的客观量化,克服了传统风险评价方法主观性过强的缺点。
35.2)基于改进的k条最短路径算法,设计满足多约束的路径诱导模型,该模型综合考虑路径风险成本和旅行时间,为驾驶员选择风险小、旅行时间短的最优出行路径,在道路运输风险评估与事故预防方面具有理论和实际应用价值。
36.3)本发明量化路段事故风险,设计了基于事故风险成本的路径诱导模型,为驾驶员提供安全性更高的出行路径,可有效降低交通事故风险,提高行车安全。
附图说明
37.构成本发明的一部分的说明书附图用来提供对本发明的进一步理解,本发明的示意性实施例及其说明用于解释本发明,并不构成对本发明的不当限定。
38.图1为实施例一的方法流程图;
39.图2为实施例一的算例网络示意图;
40.图3为实施例一的路径选择结果示意图。
具体实施方式
41.应该指出,以下详细说明都是示例性的,旨在对本发明提供进一步的说明。除非另有指明,本发明使用的所有技术和科学术语具有与本发明所属技术领域的普通技术人员通常理解的相同含义。
42.需要注意的是,这里所使用的术语仅是为了描述具体实施方式,而非意图限制根据本发明的示例性实施方式。如在这里所使用的,除非上下文另外明确指出,否则单数形式也意图包括复数形式,此外,还应当理解的是,术语“包括”和“具有”以及他们的任何变形,意图在于覆盖不排他的包含,例如,包含了一系列步骤或单元的过程、方法、系统、产品或设备不必限于清楚地列出的那些步骤或单元,而是可包括没有清楚地列出的或对于这些过程、方法、产品或设备固有的其它步骤或单元。
43.在不冲突的情况下,本发明中的实施例及实施例中的特征可以相互组合。
44.本实施例所有数据的获取都在符合法律法规和用户同意的基础上,对数据的合法应用。
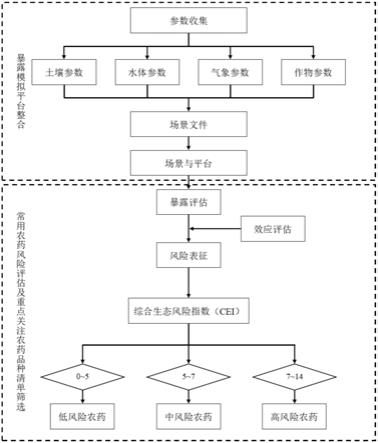
45.近年来汽车保有量持续增加,道路交通需求与供给不平衡带来了严重的交通拥堵和交通安全问题。为降低驾驶员出行风险,本发明提出了一种基于交通事故风险成本的驾驶员路径规划方法,根据熵权法及改进的k条最短路径算法,建立了以事故风险成本为主要优化目标的路径规划模型。首先,基于交通事故数据建立事故风险评价体系,构建基于人-车-路-环境多因素的事故风险成本量化模型;其次,利用熵权法计算各指标权重,确定在人-车-路-环境多因素下路段事故风险;然后,建立路径规划模型,设计基于k条最短路径的求解算法,综合考虑事故风险成本和路径旅行时间,求解最优路径。结果表明:基于历史事故数据建立的事故风险成本计算模型可以量化车辆行驶风险;基于事故风险成本的路径规划方法可以协助驾驶员选择风险小、旅行时间短的最优出行路径,有助于提高驾驶员行驶安全和效率。
46.为了实现基于事故风险的路径规划,首先需要量化路段事故风险,本发明使用交通事故数据,筛选出数据集中会对事故严重程度造成影响的人、车、路及环境等物理特性指标构建风险评价体系,建立事故风险成本量化模型,利用熵权法计算指标权重。基于此,计算路段实时风险,加载路段旅行时间,构建算例网络。接着,对限定无环的k条最短路径算法进行改进,以事故风险成本为主要目标,综合考虑路径旅行时间,在算例网络中寻找最优路径。本发明技术路线,如图1所示。
47.实施例一
48.本实施例提供了基于事故风险成本的驾驶路径规划方法;
49.如图1所示,基于事故风险成本的驾驶路径规划方法,包括:
50.s101:获取历史交通事故数据,对数据进行预处理;
51.s102:根据历史交通事故数据,建立事故风险成本评价指标体系;
52.s103:确定各指标权重,根据事故风险量化模型,确定各路段事故风险成本;
53.s104:构建算例网络,基于起点、终点、各路段事故风险成本和各路段旅行时间,采用k条最短路径求解算法,得到最优路径。
54.进一步地,所述s101:获取历史交通事故数据;其中,所述历史交通事故数据,包括:事故发生时人员、车辆、环境等状态描述以及事故类型、伤亡情况等数据;如:驾驶员年龄、性别、驾驶员是否分心驾驶、是否疲劳驾驶、是否超速行驶、车辆是否偏离车道、车辆类型、车辆是否运输危险物品、事故发生的路段、道路类型、道路线形、路面状况、时间、是否是工作日、白天或者夜晚、天气和光照情况等。
55.进一步地,所述对数据进行预处理;具体包括:
56.对数据进行清洗删除异常值;
57.因为数据集包含多个表,各数据在不同的表里,需要对数据表按事故编号进行统一合并。
58.进一步地,s102:根据历史交通事故数据,建立事故风险成本评价指标体系;其中,评价指标包括:驾驶员年龄;是否分心驾驶;是否疲劳驾驶;是否操作不当偏离车道;是否超速行驶;酒驾人数;车内安全设施是否使用(如安全带、安全座椅);驾驶员性别;驾驶员证件情况;车辆事故记录;事故是否涉及大型车辆;车辆是否携带危险货物;道路类型;道路有无交叉口;道路线形;路面状况;交通管控措施;事故发生是工作日/周末;白天/夜晚;天气状况;光照情况;
59.评价指标的确定过程:根据交通系统四要素“人、车、路、环境”,结合事故数据,筛选出既属于交通系统四要素又对交通事故严重程度造成影响的指标。
60.进一步地,s103:确定各指标权重,根据事故风险量化模型,确定各路段事故风险成本;其中,各个评价指标的权重,确定方式为:
61.采用熵权法计算各个评价指标的权重。
62.进一步地,所述采用熵权法计算各个评价指标的权重;具体包括:
63.s1031:对n个交通事故样本,m个指标,则x
ij
为第i个样本的第j个指标的数值;
64.s1032:指标的归一化处理:异质指标同质化;
65.正向指标:
[0066][0067]
负向指标:
[0068][0069]
s1033:计算第j项指标下第i个样本值占该指标的比重:
[0070][0071]
s1034:计算第j项指标的熵值:
[0072][0073]
其中,k=1/ln(n)>0,满足ej≥0;
[0074]
s1035:计算信息熵冗余度(差异):
[0075]dj
=1-ej,j=1,
…
,m
ꢀꢀꢀ
(5)
[0076]
s1036:计算各项指标的权重:
[0077][0078]
其中,x
ij
为标准化后的数据。
[0079]
应理解地,对于指标权重计算,有熵权法、层次分析法、主成分分析法等,其中,熵权法是一种客观赋权法,相对主观赋权具有较高的可信度和精确度。按照信息论基本原理的解释,信息是系统有序程度的一个度量,熵是系统无序程度的一个度量,根据信息熵的定义,对于某项指标,可以用熵值来判断某个指标的离散程度,其信息熵值越小,指标的离散程度越大,该指标对综合评价的影响(即权重)就越大。该方法比较适用于描述人、车、路、环境等指标中的异常值对事故严重程度的影响。例如,对于不同的几起交通事故,若某个指标值变化较大,而其他指标值基本不发生变化,则表明该指标导致了事故的差异性,可取较大权重。
[0080]
需要注意的是,熵权法可计算指标权重值,但实际应用过程中存在无法计算零值指标熵值的问题,因此当某一指标值存在零时,将该组评价指标数据均增加0.00001,添加微小增量既不用舍弃该组数据又保证了对各指标差异性造成较小影响。
[0081]
进一步地,s103:确定各指标权重,根据事故风险量化模型,确定各路段事故风险成本;具体包括:
[0082][0083]
其中,zi为第i个样本的事故风险成本;d
ij
为第i个样本对应第j个指标的现实数据;wj为第j个指标权重。
[0084]
在交通系统中,事故的发生需综合考虑人、车、路、环境各要素间的相互影响,各要素状态的时空变化会随时影响交通事故的发生以及事故的严重程度。现有技术较多通过构建风险指标体系的方法进行交通安全分析,但对指标的筛选、权重的确定,主观臆断较多。本发明从交通事故数据集中筛选风险评价指标,计算指标权重,根据实时数据计算综合得分,将综合得分定义为事故风险,可反映各要素对事故风险的影响。
[0085]
进一步地,s104:构建算例网络,基于起点、终点、各路段事故风险成本和各路段旅行时间,采用k条最短路径求解算法,得到最优路径;具体包括:
[0086]
s1041:交通网络初始化,确定路径的起点s、终点t和备选路径数k值;
[0087]
s1042:将各路段事故风险成本以及各路段旅行时间载入到交通网络中;
[0088]
s1043:以事故风险成本为目标,使用迪杰克斯拉算法dijkstra求出从s到t的最短路径pk;
[0089]
s1044:若k≥k,则转到s1047;
[0090]
若k《k,则把最短路径pk上除了终点t以外的其他所有节点vi均看做偏离节点,共有x个(0≤i≤x);
[0091]
s1045:遍历所有偏离节点,求出每个偏离节点vi到终点t的最短路径,将pk上从起点s到vi的路径与求出的vi到终点t的最短路径相拼接,作为候选路径储存在集合p
′k中;
[0092]
s1046:候选路径集合p
′k若为空,则转到s1047;若不为空,则计算每条候选路径的旅行时间,求出履行时间最短的路径p
k 1
,将路径p
k 1
从集合p
′k中移除,放入集合pk中,返回s1044;
[0093]
s1047:从k条候选路径中,筛选出路径旅行时间最小的为最优路径,得到结果。
[0094]
起点与终点之间有若干条路径,每一条路径由若干个路段依次连接。
[0095]
应理解地,传统的路径诱导算法是将网络图中各边的权值相加求最短,k最短路径
问题(k shortest paths,ksp)是最短路径问题的一种变形,与传统的最短路径问题不同,ksp问题的目的是寻找图中起点和终点间的多个备选优化路径,形成最短路径组,以最大程度满足用户对不同路径的选择需求。本发明基于对k条最短路径算法的改进,设计满足多约束的路径诱导算法,即在通过计算事故成本得到的k条最短路径集合中,路径旅行时间t最小的路径则为最优路径。
[0096]
k最短路径问题(k shortest paths,ksp):假定g=(v,e)表示一个网络图,其中v为n个节点的集合,e为m条边的集合。e中每条边ek用一个节点对表示,即ek=(i,j),c
i,j
表示该边的长度。假定s和t是图g中的两个节点,图中从s到t的路径p由节点序列表示,即p=(v1=s,v2,
…
,vh=t),s和t分别称为p的初始节点和终止节点。p的长度c(p)为p上所有边的长度之和,即c(p)=∑
(i,j)∈pcij
。
[0097]
从s到t的路径集合用p
st
表示,最短路径问题就是找到从s到t的具有最小长度的路径p
*
,即确定p
*
∈p
st
,使得对于其他任何p(p∈p
st
,p≠p
*
)都有c(p
*
)≤c(p)。ksp问题是对最短路径问题的推广,它除了要确定最短路径之外,还要确定次短路径、第三短路径,直到找到第k短路径为止。用pk表示从s到t的第k短路径,ksp问题是确定路径集合pk={p1,p2,
…
,pk}∈p
st
,使得满足以下3个条件:
[0098]
(1)k条路径是按次序产生的,即对于所有的i(i=1,2,
…
,k-1),pi是在pi 1之前确定的;
[0099]
(2)k条路径是按长度由小到大排列的,即对于所有的i(i=1,2,
…
,k-1),都有c(pi)《c(p
i 1
);
[0100]
(3)k条路径是最短的,即对于所有的p∈p
st-pk,都有c(pk)《c(p)。
[0101]
根据路径限制条件,ksp问题通常被分为两种:一般ksp问题和限定无环ksp问题。一般ksp问题对路径没有任何限制;限定无环ksp问题则要求求得的路径是简单路径,不能含有环。本发明的网络图不含环,因此只分析限定无环的ksp问题。
[0102]
本发明采用偏离路径算法计算限定无环ksp问题,偏离路径算法的核心在于如何利用已经求得的p1,p2,
…
,pk的最短偏离路径寻找p
k 1
,首先使用dijkstra算法找到从s到t的最短路径,并将其作为p1放入到路径集合pk中,在求得前k条路径{p1,p2,
…
,pk}之后,计算p
k 1
的过程如下:
[0103]
(1)取pk中除了终止节点之外的每个节点vi作为可能的偏离节点,计算vi到节点t的最短路径,为了避免与以前找到的路径重复,从节点vi分出的边不能与以前找到的最短路径p1,p2,
…
,pk上从vi分出的边相同;
[0104]
(2)将找到的从vi到节点t的最短路径与当前路径pk上从s到vi的路径拼接构成p
k 1
的一条候选路径,并将其储存在候选路径集合p
′k中;
[0105]
(3)从候选路径集合p
′k中选择最短的一条作为p
k 1
,并将其放入路径集合pk中;
[0106]
重复以上步骤,直到得到k条路径为止。
[0107]
本发明使用某国国家公路交通安全管理局统计的2019年交通事故数据,该数据集涵盖2019年发生的交通事故详细数据,包括事故发生时人员、车辆、环境等状态描述以及事故类型、伤亡情况等数据。根据交通系统四要素:人、车、路、环境系统性地筛选数据集中风险因子,包括事故发生的时间、驾驶员性别、道路线形、天气等22个指标(见表1),这些指标会对事故严重程度造成不同的影响。
[0108]
表1事故成本影响因子指标集
[0109][0110]
(a_d15_20:年龄15-20的年轻驾驶员;a_d65pls:年龄》65的老年驾驶员;a_dist:分心驾驶;a_drowsy:疲劳驾驶;a_relrd:操作不当偏离车道;a_spcra:超速行驶;drynk_dr:酒驾人数;rest_use:车内安全设施;sex:驾驶员性别;a_lic_s:驾驶员证件情况;prev_acc:事故记录;a_lt:大型车辆;haz_inv:危险货物;a_ru:道路类型;a_intesc:道路交叉口;valign:道路线形;vsurcond:路面状况;vtrafcon:交通管控设施;a_dow:工作日/周末;a_tod:白天/夜晚;weather:天气状况;lgt_con:光照条件)
[0111]
数据集结构复杂、指标众多、样本量大,因此需要对数据进行清洗删除异常数据。然后,筛选出影响因子指标,影响因子分布在多个数据表中,为了便于后续数据处理,将筛选后的数据表依据事故编号进行连接,合并为一张数据表(见表2),处理后共包含26218条事故数据,22个事故成本影响因子。
[0112]
表2数据预处理后部分结果
[0113][0114]
事故风险成本量化:使用python实现熵权法,对指标进行客观赋权,指标熵值、权重见表3。
[0115]
表3事故成本影响因子指标权重计算结果
[0116][0117][0118]
结合公式(7),车辆在某一路段行驶的事故风险成本计算公式如下:
[0119]
zi=0.026981d
ij
0.034764d
ij
…
0.039489d
ij
0.068413d
ij
ꢀꢀꢀ
(8)
[0120]
式中:zi为第i个路段的事故风险成本;d
ij
为第i个路段第j个指标的实时数据;i=1,
…
,n;j=1,
…
,m。
[0121]
路径诱导算例分析:算例采用的路网由10个节点和14条路段组成,具体如图2和图3所示。通过假定路网实时人、车、路、环境等参数,赋予每个路段相应的属性,并以此为基础根据公式(8)计算每个路段的事故风险成本,结果见表4。
[0122]
表4网络特征参数
[0123][0124][0125]
使用python实现路径诱导模型算法,输入网络参数,k设置为3(即计算3条候选路径),以风险成本为目标通过dijkstra算法求出v1到v
10
的最短路p1=(v1,v3,v4,v5,v9,v
10
),路径风险成本∑zi=6.19,p2的详细计算步骤如下:
[0126]
表5偏离路径算法
[0127][0128]
遍历完各个偏离节点后得到四条候选路径,分别计算每条候选路径的旅行时间为:31,31,29,33。选择路径旅行时间最短的路径作为p2,因此,输出的第二条路径为:p2=(v1,v3,v4,v8,v9,v
10
)。
[0129]
同理,模型输出第三条路径为:p3=(v1,v2,v4,v5,v9,v
10
),参考表6,选择旅行时间最小的路径作为最优路径,p1,p2路径旅行时间均为29,但p1风险成本更低,因此p1=(v1,v3,v4,v5,v9,v
10
)为该网络最优路径。
[0130]
表6最短路径列表
[0131][0132]
根据路径选择结果可知:该模型以路径事故风险成本为主要目标综合考虑路径旅行时间实现多约束路径诱导,选择的最优路径在风险成本较低的基础上满足了旅行时间也较短,使两者保持在相对均衡的状态。
[0133]
实施例二
[0134]
本实施例提供了基于事故风险成本的驾驶路径规划系统;
[0135]
基于事故风险成本的驾驶路径规划系统,包括:
[0136]
获取模块,其被配置为:获取历史交通事故数据,对数据进行预处理;
[0137]
评价指标体系建立模块,其被配置为:根据历史交通事故数据,建立事故风险成本评价指标体系;
[0138]
事故风险成本确定模块,其被配置为:确定各指标权重,根据事故风险量化模型,确定各路段事故风险成本;
[0139]
最优路径求解模块,其被配置为:构建算例网络,基于起点、终点、各路段事故风险成本和各路段旅行时间,采用k条最短路径求解算法,得到最优路径。
[0140]
此处需要说明的是,上述获取模块、评价指标体系建立模块、事故风险成本确定模块和最优路径求解模块对应于实施例一中的步骤s101至s104,上述模块与对应的步骤所实现的示例和应用场景相同,但不限于上述实施例一所公开的内容。需要说明的是,上述模块作为系统的一部分可以在诸如一组计算机可执行指令的计算机系统中执行。
[0141]
上述实施例中对各个实施例的描述各有侧重,某个实施例中没有详述的部分可以参见其他实施例的相关描述。
[0142]
所提出的系统,可以通过其他的方式实现。例如以上所描述的系统实施例仅仅是示意性的,例如上述模块的划分,仅仅为一种逻辑功能划分,实际实现时,可以有另外的划分方式,例如多个模块可以结合或者可以集成到另外一个系统,或一些特征可以忽略,或不执行。
[0143]
实施例三
[0144]
本实施例还提供了一种电子设备,包括:一个或多个处理器、一个或多个存储器、以及一个或多个计算机程序;其中,处理器与存储器连接,上述一个或多个计算机程序被存储在存储器中,当电子设备运行时,该处理器执行该存储器存储的一个或多个计算机程序,以使电子设备执行上述实施例一所述的方法。
[0145]
应理解,本实施例中,处理器可以是中央处理单元cpu,处理器还可以是其他通用处理器、数字信号处理器dsp、专用集成电路asic,现成可编程门阵列fpga或者其他可编程逻辑器件、分立门或者晶体管逻辑器件、分立硬件组件等。通用处理器可以是微处理器或者该处理器也可以是任何常规的处理器等。
[0146]
存储器可以包括只读存储器和随机存取存储器,并向处理器提供指令和数据、存储器的一部分还可以包括非易失性随机存储器。例如,存储器还可以存储设备类型的信息。
[0147]
在实现过程中,上述方法的各步骤可以通过处理器中的硬件的集成逻辑电路或者软件形式的指令完成。
[0148]
实施例一中的方法可以直接体现为硬件处理器执行完成,或者用处理器中的硬件及软件模块组合执行完成。软件模块可以位于随机存储器、闪存、只读存储器、可编程只读存储器或者电可擦写可编程存储器、寄存器等本领域成熟的存储介质中。该存储介质位于存储器,处理器读取存储器中的信息,结合其硬件完成上述方法的步骤。为避免重复,这里不再详细描述。
[0149]
本领域普通技术人员可以意识到,结合本实施例描述的各示例的单元及算法步骤,能够以电子硬件或者计算机软件和电子硬件的结合来实现。这些功能究竟以硬件还是软件方式来执行,取决于技术方案的特定应用和设计约束条件。专业技术人员可以对每个特定的应用来使用不同方法来实现所描述的功能,但是这种实现不应认为超出本发明的范围。
[0150]
实施例四
[0151]
本实施例还提供了一种计算机可读存储介质,用于存储计算机指令,所述计算机指令被处理器执行时,完成实施例一所述的方法。
[0152]
以上所述仅为本发明的优选实施例而已,并不用于限制本发明,对于本领域的技术人员来说,本发明可以有各种更改和变化。凡在本发明的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本发明的保护范围之内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。