1.本发明涉及图像检测领域,尤其涉及一种水下图像智能检测处理系统。
背景技术:
2.图像是人类视觉的基础,是自然景物的客观反映,是人类认识世界和人类本身的重要源泉。“图”是物体反射或透射光的分布,“像“是人的视觉系统所接受的图在人脑中所形成的印象或认识,照片、绘画、剪贴画、地图、书法作品、手写汉学、传真、卫星云图、影视画面、x光片、脑电图、心电图等都是图像。
3.图像是客观对象的一种相似性的、生动性的描述或写真,是人类社会活动中最常用的信息载体。或者说图像是客观对象的一种表示,它包含了被描述对象的有关信息。它是人们最主要的信息源。据统计,一个人获取的信息大约有75%来自视觉。
4.广义上,图像就是所有具有视觉效果的画面,它包括:纸介质上的、底片或照片上的、电视、投影仪或计算机屏幕上的。图像根据图像记录方式的不同可分为两大类:模拟图像和数字图像。模拟图像可以通过某种物理量(如光、电等)的强弱变化来记录图像亮度信息,例如模拟电视图像;而数字图像则是用计算机存储的数据来记录图像上各点的亮度信息。
5.目前,在垂钓人员从事钓鱼操作中,最关心的是鱼线末端附近的鱼体的尺寸,这关系到垂钓人员后续的钓鱼操作的选择和次序。然而,由于水面的遮挡,这样的第一手数据通常需要将鱼体掉离水面后方能够人眼目测获得,这时对后续的钓鱼操作已经意义不大。
技术实现要素:
6.为了解决相关领域的技术问题,本发明提供了一种水下图像智能检测处理系统,能够在针对性的图像检测机制的基础上,在将鱼体掉离水面之前就可以完成对即将上钩的鱼体尺寸的可视化识别和判断,从而为后续钓鱼动作的决定提供重要参考信息。
7.为此,本发明至少需要具备以下几处关键的发明点:
8.(1)在检测到鱼竿鱼线底部的湿度大于等于设定湿度数值时,判断进入垂钓状态并触发设置在鱼竿的前端的微型摄像器件完成对鱼线底部所在场景的摄像操作,以获得对应的鱼线周围图像;
9.(2)采用针对性的图像检测机制对水下靠近鱼竿鱼钩最近的鱼体目标执行尺寸检测,并将获取的尺寸通过蓝牙通信链路及时上报给垂钓人员的蓝牙耳机以为垂钓人员及时提供第一手数据。
10.根据本发明的一方面,提供了一种水下图像智能检测处理系统,所述系统包括:
11.湿度传感机构,设置在鱼线底部,用于在检测到鱼线底部的湿度以作为当前检测湿度输出。
12.更具体地,在所述水下图像智能检测处理系统中,所述系统还包括:
13.指令提取机构,分别与湿度传感机构和微型摄像器件连接,用于在接收到的当前
检测湿度大于等于设定湿度数值时,发出第一触发指令。
14.更具体地,在所述水下图像智能检测处理系统中:
15.所述指令提取机构还用于在接收到的当前检测湿度小于所述设定湿度数值时,发出第二触发指令。
16.更具体地,在所述水下图像智能检测处理系统中,所述系统还包括:
17.微型摄像器件,设置在鱼竿的前端,与系有吊钩的鱼线并排布置,用于在接收到第一触发指令时,完成对鱼线底部所在场景的摄像操作,以获得对应的鱼线周围图像;
18.第一捕获机构,与所述微型摄像器件连接,用于对接收到的鱼线周围图像执行透镜阴影效应消除操作,以获得对应的第一捕获图像;
19.第二捕获机构,与所述第一捕获机构连接,用于对接收到的第一捕获图像执行白平衡处理操作,以获得对应的第二捕获图像;
20.第三捕获机构,与所述第二捕获机构连接,用于对接收到的第二捕获图像执行内容增强处理,以获得对应的第三捕获图像;
21.第一解析器件,与所述第三捕获机构连接,用于基于鱼体灰度数值范围识别所述第三捕获图像中各个鱼体目标分别所在的各个鱼体子图像;
22.第二解析器件,与所述第一解析器件连接,用于基于鱼钩的几何形状识别所述第三捕获图像中的鱼钩目标所在的鱼钩子图像;
23.第三解析器件,分别与所述第一解析器件和所述第二解析器件连接,用于获取每一个鱼体子图像与所述鱼钩子图像之间的成像距离,并将成像距离最短的鱼体子图像作为有效子图像输出;
24.参数辨别机构,与所述第三解析器件连接,用于获取所述有效子图像在所述第三捕获图像中的整体景深数据以及所述有效子图像在所述第三捕获图像中占据的像素点总数;
25.尺寸识别机构,与所述参数辨别机构连接,用于根据所述有效子图像在所述第三捕获图像中的整体景深数据以及所述有效子图像在所述第三捕获图像中占据的像素点总数确定所述有效子图像对应的鱼体的尺寸以作为最近鱼体尺寸输出;
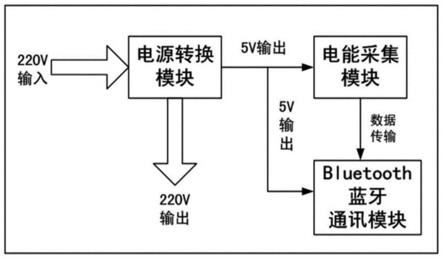
26.蓝牙通信机构,与所述尺寸识别机构连接,用于将所述最近鱼体尺寸通过蓝牙通信链路无线发送给钓鱼人员的蓝牙耳机。
27.本发明的水下图像智能检测处理系统结构简单、方便实用。由于能够在将鱼体掉离水面之前就可以完成对即将上钩的鱼体尺寸的可视化识别和判断,从而为钓鱼操作提供及时可靠的参考数据。
附图说明
28.以下将结合附图对本发明的实施方案进行描述,其中:
29.图1为根据本发明实施方案示出的水下图像智能检测处理系统的蓝牙通信机构的结构示意图。
具体实施方式
30.下面将参照附图对本发明的水下图像智能检测处理系统的实施方案进行详细说
明。
31.鱼线是指鱼的身上一条侧线,就是在鱼体两侧的由许多小孔排列而成的线条。鱼通过鱼线感受到鱼耳所不能感受的低频振动,当敌害接近时,能及时发觉而逃离。鱼线也指钓鱼时用的线,常作“渔线”。
32.尼龙的发明是近代史上的一大创举,它给纺织、国防、民生带来了革命性的震撼,尤其将尼龙油制成线,充当垂钓用的线,不但是钓鱼上划时代之盛事,同时也为钓鱼运动的发展写下了新的一页。
33.最早产制尼龙钓线的是美国的厂商杜邦。尼龙钓线即使是在草创初期其钓力和直径之纤细都远在其它代用品之上、基于这两个缘故使得欧美生产的钓渔线、规格标示都以最实际的钓力值来计算。欧美的重量单位是磅,所以钓线的规格单位便是磅数制了。
34.目前,在垂钓人员从事钓鱼操作中,最关心的是鱼线末端附近的鱼体的尺寸,这关系到垂钓人员后续的钓鱼操作的选择和次序。然而,由于水面的遮挡,这样的第一手数据通常需要将鱼体掉离水面后方能够人眼目测获得,这时对后续的钓鱼操作已经意义不大。
35.为了克服上述不足,本发明搭建了一种水下图像智能检测处理系统,能够有效解决相应的技术问题。
36.根据本发明实施方案示出的水下图像智能检测处理系统包括:
37.湿度传感机构,设置在鱼线底部,用于在检测到鱼线底部的湿度以作为当前检测湿度输出。
38.接着,继续对本发明的水下图像智能检测处理系统的具体结构进行进一步的说明。
39.所述水下图像智能检测处理系统中还可以包括:
40.指令提取机构,分别与湿度传感机构和微型摄像器件连接,用于在接收到的当前检测湿度大于等于设定湿度数值时,发出第一触发指令。
41.所述水下图像智能检测处理系统中:
42.所述指令提取机构还用于在接收到的当前检测湿度小于所述设定湿度数值时,发出第二触发指令。
43.所述水下图像智能检测处理系统中还可以包括:
44.微型摄像器件,设置在鱼竿的前端,与系有吊钩的鱼线并排布置,用于在接收到第一触发指令时,完成对鱼线底部所在场景的摄像操作,以获得对应的鱼线周围图像;
45.第一捕获机构,与所述微型摄像器件连接,用于对接收到的鱼线周围图像执行透镜阴影效应消除操作,以获得对应的第一捕获图像;
46.第二捕获机构,与所述第一捕获机构连接,用于对接收到的第一捕获图像执行白平衡处理操作,以获得对应的第二捕获图像;
47.第三捕获机构,与所述第二捕获机构连接,用于对接收到的第二捕获图像执行内容增强处理,以获得对应的第三捕获图像;
48.第一解析器件,与所述第三捕获机构连接,用于基于鱼体灰度数值范围识别所述第三捕获图像中各个鱼体目标分别所在的各个鱼体子图像;
49.第二解析器件,与所述第一解析器件连接,用于基于鱼钩的几何形状识别所述第三捕获图像中的鱼钩目标所在的鱼钩子图像;
50.第三解析器件,分别与所述第一解析器件和所述第二解析器件连接,用于获取每一个鱼体子图像与所述鱼钩子图像之间的成像距离,并将成像距离最短的鱼体子图像作为有效子图像输出;
51.参数辨别机构,与所述第三解析器件连接,用于获取所述有效子图像在所述第三捕获图像中的整体景深数据以及所述有效子图像在所述第三捕获图像中占据的像素点总数;
52.尺寸识别机构,与所述参数辨别机构连接,用于根据所述有效子图像在所述第三捕获图像中的整体景深数据以及所述有效子图像在所述第三捕获图像中占据的像素点总数确定所述有效子图像对应的鱼体的尺寸以作为最近鱼体尺寸输出;
53.蓝牙通信机构,其内部结构如图1所示,与所述尺寸识别机构连接,用于将所述最近鱼体尺寸通过蓝牙通信链路无线发送给钓鱼人员的蓝牙耳机。
54.所述水下图像智能检测处理系统中:
55.根据所述有效子图像在所述第三捕获图像中的整体景深数据以及所述有效子图像在所述第三捕获图像中占据的像素点总数确定所述有效子图像对应的鱼体的尺寸以作为最近鱼体尺寸输出包括:根据所述有效子图像在所述第三捕获图像中的整体景深数据以及所述有效子图像在所述第三捕获图像中占据的像素点总数确定所述有效子图像对应的鱼体的体积以作为最近鱼体体积输出。
56.所述水下图像智能检测处理系统中:
57.根据所述有效子图像在所述第三捕获图像中的整体景深数据以及所述有效子图像在所述第三捕获图像中占据的像素点总数确定所述有效子图像对应的鱼体的尺寸以作为最近鱼体尺寸输出包括:在所述有效子图像在所述第三捕获图像中的整体景深数据不变时,所述有效子图像在所述第三捕获图像中占据的像素点总数与所述最近鱼体尺寸正相关。
58.所述水下图像智能检测处理系统中:
59.根据所述有效子图像在所述第三捕获图像中的整体景深数据以及所述有效子图像在所述第三捕获图像中占据的像素点总数确定所述有效子图像对应的鱼体的尺寸以作为最近鱼体尺寸输出包括:在所述最近鱼体尺寸不变时,所述有效子图像在所述第三捕获图像中占据的像素点总数与所述有效子图像在所述第三捕获图像中的整体景深数据正相关。
60.所述水下图像智能检测处理系统中:
61.获取每一个鱼体子图像与所述鱼钩子图像之间的成像距离,并将成像距离最短的鱼体子图像作为有效子图像输出包括:获取所述鱼体子图像的边缘曲线构成的几何形状对应的形心以作为第一形心,获取所述鱼钩子图像的边缘曲线构成的几何形状对应的形心以作为第二形心,将所述第一形心和所述第二形心之间的最短距离经历的像素点的数量作为当前参考数量,将当前参考数据最小的鱼体子图像作为有效子图像。
62.所述水下图像智能检测处理系统中:
63.对接收到的鱼线周围图像执行透镜阴影效应消除操作,以获得对应的第一捕获图像包括:获取所述微型摄像器件的光学透镜的光学特性,并基于所述光学透镜的光学特性对接收到的鱼线周围图像执行透镜阴影效应消除操作,以获得对应的第一捕获图像。
64.所述水下图像智能检测处理系统中:
65.所述微型摄像器件还用于在接收到第二触发指令时,暂停对鱼线底部所在场景的摄像操作。
66.另外,在所述水下图像智能检测处理系统中,获取所述有效子图像在所述第三捕获图像中的整体景深数据以及所述有效子图像在所述第三捕获图像中占据的像素点总数包括:获取所述有效子图像在所述第三捕获图像中的各个构成像素点分别对应的各个景深数据,将所述各个构成像素点分别对应的各个景深数据的中间值作为所述有效子图像在所述第三捕获图像中的整体景深数据,同时获取所述有效子图像在所述第三捕获图像中占据的像素点总数。
67.对于本领域普通技术人员来说,能够对本发明进行不同的修改和变化将是很显然的。因此,本发明旨在覆盖落入所附权利要求范围及其等价范围内的对本发明的修改和变化。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。