1.本发明涉及检测设备技术领域,具体为一种草地绿色植物与枯萎植物重量比例遥感估算方法。
背景技术:
2.绿色植物与枯萎植物重量比例是草地生态系统重要的结构参数,是反映草地植被生长状况最直接的指标,对草地生态系统的结构、功能与过程起着决定性作用。对草地绿色植物与枯萎植物重量比例进行快速评估,对指导区域草地科学利用具有重要的现实意义。
3.近年来,遥感技术迅猛发展,并以其宏观性、时效性、信息量大等特点在草地资源调查等领域展示了日渐广阔的应用前景,遥感技术进行检测估算时,一般通过无人机进行摄像取样,但是无人机在野外长时间的使用过后,其摄像机的保护罩很容易附着灰尘污渍,不容易进行清理,而保护罩又不方便进行拆卸,因此我们提出了一种草地绿色植物与枯萎植物重量比例遥感估算方法。
技术实现要素:
4.(一)解决的技术问题
5.针对现有技术的不足,本发明公开了一种草地绿色植物与枯萎植物重量比例遥感估算方法,以解决上述背景技术中提出的问题。
6.(二)技术方案
7.为实现以上目的,本发明通过以下技术方案予以实现:一种草地绿色植物与枯萎植物重量比例遥感估算方法,包括以下步骤:
8.s1、选取采样点:在测量地图中按照点状取样法或者等距取样法选出适量的采样点,并在采样点布设标记物;
9.s2、摄像取样图:操控无线遥感无人机飞至空中,对采样点进行摄像拍照,取得样图;
10.s3、光谱处理:对样图进行识别,然后对样图进行处理,绿色植物与枯萎植物呈现不同的颜色,将区别性放大化;
11.s4、数据比对:将处理后的样图中绿色植物与枯萎植物的不同颜色的面积进行计算与比对,从而得到绿色植物与枯萎植物的重量比例;
12.s5、数据传输:将经过处理的样图和计算后的数据比例传输到测量人员的客户度处,快速得到采样点每处的比例,然后再次对比例进行统计估算。
13.一种草地绿色植物与枯萎植物重量比例遥感估算装置,包括:
14.机身,所述机身的外表面固定有六个机翼,且六个所述机翼的端部均装配有旋翼,所述机身的底部对称固定连接有固定条,所述固定条的侧壁上固定连接有支撑架;
15.第一转动轴,所述机身的内部装配有第一驱动电机,所述第一转动轴的顶端固定连接在第一驱动电机的输出端,所述第一转动轴的底端穿过机身的下表面向外延伸并固定
连接有连接条,所述连接条设置为“7”字型,所述连接条的竖向部分的外壁固定连接有第二驱动电机,所述第二驱动电机的输出端固定有第二转动轴,所述第二转动轴的端部固定连接有摄像机;
16.两个卡接机构,所述机身的底部装配有防护罩,且所述防护罩与两个卡接机构相连接,且所述摄像机处于防护罩的内部。
17.优选的,所述机身的底部开设有环形密封槽,所述防护罩的顶部固定连接有密封环,且所述密封环与环形密封槽的内壁相贴合。
18.优选的,所述机身的底部对称固定连接有四个定位导向杆,所述防护罩的外圆表面对称固定连接有四个导向定位环,且四个所述导向定位环分别套接在四个定位导向杆的外表面。
19.优选的,所述卡接机构包括固定块和限位块,所述固定块固定连接在机身的底部和固定条的侧壁之间,所述限位块固定连接在防护罩的外表面,且所述限位块的顶部与侧面分别与固定条和固定块相贴合。
20.优选的,所述固定条的内部开设有空槽,空槽的内壁上滑动连接有滑动块,所述滑动块的侧壁上固定连接有卡块,所述限位块的侧壁开设有卡槽,所述卡块的端部穿过固定条的外壁插接在卡槽的内壁中,所述滑动块的另一侧转动连接有活动杆。
21.优选的,所述活动杆端部穿过固定条的外壁向外延伸并固定连接旋钮,所述滑动块的侧壁与空槽的内壁之间固定连接有限位弹簧,且所述限位弹簧活动套接在活动杆的外表面。
22.优选的,所述固定块的侧壁上开设有与空槽相连通的定位槽,所述活动杆的外表面固定连接有定位条,且所述定位条的外表面与定位槽的内壁相贴合。
23.本发明公开了一种草地绿色植物与枯萎植物重量比例遥感估算方法,其具备的有益效果如下:
24.1、该草地绿色植物与枯萎植物重量比例遥感估算方法,在测量地图中按照点状取样法或者等距取样法选出适量的采样点,并在采样点布设标记物;摄像取样图:操控无线遥感无人机飞至空中,对采样点进行摄像拍照,取得样图;对样图进行识别,然后对样图进行处理,绿色植物与枯萎植物呈现不同的颜色,将区别性放大化;将处理后的样图中绿色植物与枯萎植物的不同颜色的面积进行计算与比对,从而得到绿色植物与枯萎植物的重量比例;将经过处理的样图和计算后的数据比例传输到测量人员的客户度处,快速得到采样点每处的比例,然后再次对比例进行统计估算,简单快速,大大方便了估算的速度。
25.2、该草地绿色植物与枯萎植物重量比例遥感估算方法,使用的过程中,当需要对防护罩拆卸清理时,首先向外拉动旋钮,带动了活动杆向外滑动,使得滑动块空槽的内壁上滑动,压缩了限位弹簧,并带动了卡块的端部从卡槽中脱离,同时定位条从定位槽的内壁中向外滑动,使得定位条从定位槽脱离,此时可以转动旋钮,带动了活动杆和定位条进行进行转动,使得定位条无法进入到定位槽中,则对活动杆和卡块的位置固定,使卡块无法插入到卡槽中,此时即可直接向下拉动防护罩,并对防护罩进行清理。
26.3、该草地绿色植物与枯萎植物重量比例遥感估算方法,在使用过程中,机身通过六个旋翼移动到采样点的空中进行拍照,取得样图,且在拍照取样时,第一驱动电机工作时,带动了第一转动轴进行转动,进而通过连接条带动了摄像机左右进行转动,且在第二驱
动电机工作时,带动了第二转动轴进行转动,进而带动了摄像机上下进行翻转,从而便于摄像机对摄像方向进行调节,大大增加了拍照的范围,便于对采样点进行拍照取样。
附图说明
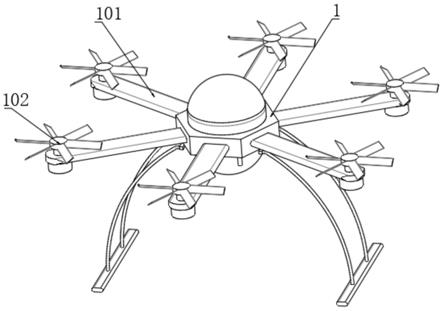
27.图1为本发明结构示意图;
28.图2为本发明部分结构示意图;
29.图3为本发明机身和防护罩的结构示意图;
30.图4为本发明机身底部的结构示意图;
31.图5为本发明防护罩的结构示意图;
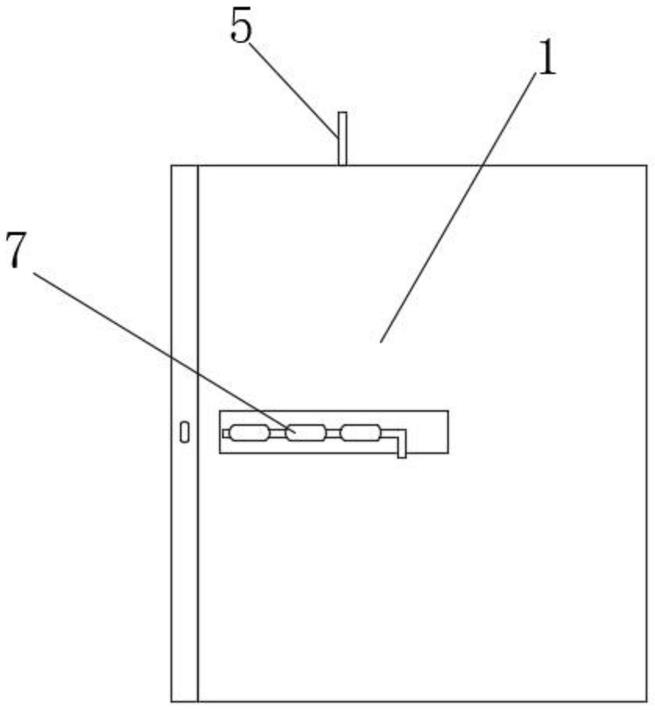
32.图6为本发明卡接机构的结构示意图;
33.图7为本发明卡接机构的结构剖视图;
34.图8为本发明估算方法流程图。
35.图中:1、机身;101、机翼;102、旋翼;103、固定条;104、支撑架;105、导向杆;2、第一转动轴;201、连接条;202、第二转动轴;203、摄像机;204、防护罩;205、环形密封槽;206、密封环;207、导向定位环;3、固定块;301、限位块;302、滑动块;303、卡块;304、卡槽;305、活动杆;306、限位弹簧;307、定位槽;308、定位条。
具体实施方式
36.本发明实施例公开一种草地绿色植物与枯萎植物重量比例遥感估算方法,请参照附图8,包括以下步骤:
37.s1、选取采样点:在测量地图中按照点状取样法或者等距取样法选出适量的采样点,并在采样点布设标记物;
38.s2、摄像取样图:操控无线遥感无人机飞至空中,对采样点进行摄像拍照,取得样图;
39.s3、光谱处理:对样图进行识别,然后对样图进行处理,绿色植物与枯萎植物呈现不同的颜色,将区别性放大化;
40.s4、数据比对:将处理后的样图中绿色植物与枯萎植物的不同颜色的面积进行计算与比对,从而得到绿色植物与枯萎植物的重量比例;
41.s5、数据传输:将经过处理的样图和计算后的数据比例传输到测量人员的客户度处,快速得到采样点每处的比例,然后再次对比例进行统计估算。
42.实施例一:
43.请参照附图1-4,一种草地绿色植物与枯萎植物重量比例遥感估算装置,包括:
44.机身1,机身1的外表面固定有六个机翼101,且六个机翼101的端部均装配有旋翼102,机身1的底部对称固定连接有固定条103,固定条103的侧壁上固定连接有支撑架104;
45.第一转动轴2,机身1的内部装配有第一驱动电机,第一转动轴2的顶端固定连接在第一驱动电机的输出端,第一转动轴2的底端穿过机身1的下表面向外延伸并固定连接有连接条201,连接条201设置为“7”字型,连接条201的竖向部分的外壁固定连接有第二驱动电机,第二驱动电机的输出端固定有第二转动轴202,第二转动轴202的端部固定连接有摄像机203;
46.两个卡接机构,机身1的底部装配有防护罩204,且防护罩204与两个卡接机构相连接,且摄像机203处于防护罩204的内部;
47.在使用过程中,机身1通过六个旋翼102移动到采样点的空中进行拍照,取得样图,且在拍照取样时,第一驱动电机工作时,带动了第一转动轴2进行转动,进而通过连接条201带动了摄像机203左右进行转动,且在第二驱动电机工作时,带动了第二转动轴202进行转动,进而带动了摄像机203上下进行翻转,从而便于摄像机203对摄像方向进行调节,大大增加了拍照的范围,便于对采样点进行拍照取样。
48.请参照附图4-5,机身1的底部开设有环形密封槽205,防护罩204的顶部固定连接有密封环206,且密封环206与环形密封槽205的内壁相贴合。
49.工作原理:在使用过程中,机身1通过六个旋翼102移动到采样点的空中进行拍照,取得样图,且在拍照取样时,第一驱动电机工作时,带动了第一转动轴2进行转动,进而通过连接条201带动了摄像机203左右进行转动,且在第二驱动电机工作时,带动了第二转动轴202进行转动,进而带动了摄像机203上下进行翻转,从而便于摄像机203对摄像方向进行调节,大大增加了拍照的范围,便于对采样点进行拍照取样;
50.且通过设置防护罩204,可以对摄像机203起到有效的防护作用,避免摄像机203受到损坏的情况,且通过设置的环形密封槽205和密封环206,大大增加了防护罩204的密封性。
51.实施例二:
52.请参照附图1-4,一种草地绿色植物与枯萎植物重量比例遥感估算装置,包括:
53.机身1,机身1的外表面固定有六个机翼101,且六个机翼101的端部均装配有旋翼102,机身1的底部对称固定连接有固定条103,固定条103的侧壁上固定连接有支撑架104;
54.第一转动轴2,机身1的内部装配有第一驱动电机,第一转动轴2的顶端固定连接在第一驱动电机的输出端,第一转动轴2的底端穿过机身1的下表面向外延伸并固定连接有连接条201,连接条201设置为“7”字型,连接条201的竖向部分的外壁固定连接有第二驱动电机,第二驱动电机的输出端固定有第二转动轴202,第二转动轴202的端部固定连接有摄像机203;
55.两个卡接机构,机身1的底部装配有防护罩204,且防护罩204与两个卡接机构相连接,且摄像机203处于防护罩204的内部;
56.使用的过程中,当需要对防护罩204拆卸清理时,首先向外拉动旋钮,带动了活动杆305向外滑动,使得滑动块302空槽的内壁上滑动,压缩了限位弹簧306,并带动了卡块303的端部从卡槽304中脱离,同时定位条308从定位槽307的内壁中向外滑动,使得定位条308从定位槽307脱离,此时可以转动旋钮,带动了活动杆305和定位条308进行进行转动,使得定位条308无法进入到定位槽307中,则对活动杆305和卡块303的位置固定,使卡块303无法插入到卡槽304中,此时即可直接向下拉动防护罩204,并对防护罩204进行清理。
57.请参照附图4-5,机身1的底部对称固定连接有四个定位导向杆105,防护罩204的外圆表面对称固定连接有四个导向定位环207,且四个导向定位环207分别套接在四个定位导向杆105的外表面。
58.请参照附图3-5,卡接机构包括固定块3和限位块301,固定块3固定连接在机身1的底部和固定条103的侧壁之间,限位块301固定连接在防护罩204的外表面,且限位块301的
顶部与侧面分别与固定条103和固定块3相贴合。
59.请参照附图6-7,固定条103的内部开设有空槽,空槽的内壁上滑动连接有滑动块302,滑动块302的侧壁上固定连接有卡块303,限位块301的侧壁开设有卡槽304,卡块303的端部穿过固定条103的外壁插接在卡槽304的内壁中,滑动块302的另一侧转动连接有活动杆305。
60.请参照附图6-7,活动杆305端部穿过固定条103的外壁向外延伸并固定连接旋钮,滑动块302的侧壁与空槽的内壁之间固定连接有限位弹簧306,且限位弹簧306活动套接在活动杆305的外表面。
61.请参照附图6-7,固定块3的侧壁上开设有与空槽相连通的定位槽307,活动杆305的外表面固定连接有定位条308,且定位条308的外表面与定位槽307的内壁相贴合。
62.工作原理:在使用的过程中,当需要对防护罩204拆卸清理时,首先向外拉动旋钮,带动了活动杆305向外滑动,使得滑动块302空槽的内壁上滑动,压缩了限位弹簧306,并带动了卡块303的端部从卡槽304中脱离,同时定位条308从定位槽307的内壁中向外滑动,使得定位条308从定位槽307脱离,此时可以转动旋钮,带动了活动杆305和定位条308进行进行转动,使得定位条308无法进入到定位槽307中,则对活动杆305和卡块303的位置固定,使卡块303无法插入到卡槽304中,此时即可直接向下拉动防护罩204,并对防护罩204进行清理;
63.清理结束后,需要对防护罩204进行安装时,首先将防护罩204的外圆表面的四个导向定位环207分别套接在四个定位导向杆105的外表面,并向上推动防护罩204,直至使得导向定位环207与机身1的底部相抵,此时限位块301的顶部与侧面分别与固定条103和固定块3相贴合,然后可以转动旋钮,直至使得定位条308可以进入到定位槽307中,此时在限位弹簧306弹力的作用下,推动滑动块302空槽的内壁上滑动,并使得卡块303的端部插入到卡槽304中,则对限位块301的位置固定,并完成了防护罩204的安装,简单方便。
64.以上显示和描述了本发明的基本原理和主要特征和本发明的优点。本行业的技术人员应该了解,本发明不受上述实施例的限制,上述实施例和说明书中描述的只是说明本发明的原理,在不脱离本发明精神和范围的前提下,本发明还会有各种变化和改进,这些变化和改进都落入要求保护的本发明范围内。本发明要求保护范围由所附的权利要求书及其等效物界定。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。