1.本发明涉及井筒衬砌技术领域,特别是涉及一种流水线式竖井内壁浇筑方法。
背景技术:
2.竖井是地下结构与地面连通的重要通道,并有其特殊使用功能,如通风、紧急逃难通道等,对于竖井而言,其需要很厚的衬砌壁以抵抗地层的压力以及防止外界水渗漏至井内。竖井开挖后洞径较小,深度较深,搭脚手架进行衬砌施工既不方便也不科学,且模板的支拆施工不便使用垂直运输设备,在施工上存在较大的困难。
3.由于竖井的结构类似于烟囱,因此有人尝试来采用类似于烟囱施工那样的爬模施工工艺进行竖井衬砌壁施工,比如cn102704674b-竖井液压自升模板及施工方法。
4.但现有的竖井爬模施工系统存在很多问题,其中最为明显的有以下四条:1.需要在已终凝的衬砌壁上设置支撑点(如cn102704674b中的“锚固装置”)来支撑爬模系统,这导致工期进一步延长(需等混凝土终凝,每次爬升还需要完成爬模系统与当前支撑点的脱离以及与下一个支撑点的连接),且衬砌壁被破坏;2.每次爬升都需要退模(退模指的是让模板沿水平方向后退以与混凝土分离,不退模的话,已终凝的混凝土将使得圆筒状的竖井模板无法爬升),由于竖井的模板是圆筒状结构,而不是一个平板,因此欲退模必须先拆模,爬升完还需要重新支模,工作量大且工期延长,且支模时精度难以控制;3.由于无法使用对拉螺杆,因此对模板的支撑效果差,不能有效抵抗涨模力;4.爬模施工前需要提前绑扎钢筋笼。
技术实现要素:
5.本发明提供一种流水线式竖井内壁浇筑方法。
6.解决的技术问题是:已有的竖井爬模施工系统存在以下问题:1.需要在已终凝的衬砌壁上设置支撑点;2.每次爬升都需要退模,爬升完还需要重新支模,且支模时精度难以控制;3.不能有效抵抗涨模力,易涨模;4.爬模施工前需要提前绑扎钢筋笼。
7.为解决上述技术问题,本发明采用如下技术方案:一种流水线式竖井内壁浇筑方法,采用爬模施工系统在竖井内自下而上施工竖井衬砌,并包括以下步骤:步骤一:将竖井衬砌分成从一开始自下而上序号逐渐增大的多个施工段,第一个施工段记作基础段;爬模施工系统中的模板围合成上粗下细的变径筒结构,序号大于一的各施工段的高度相同且均小于变径筒的高度,并记作空中段;完成基础段的施工,施工时以尚未组装到爬模施工系统中的模板浇筑基础段的混凝土;步骤二:基础段初凝后,拆模并在竖井底组装完成爬模施工系统;所述爬模施工系
统包括三个水平设置、上下叠合、相互固定连接为一体、并用于承载施工人员进行作业的主工作平台,所述主工作平台自上而下依次为用于进行钢筋绑扎的绑扎平台、用于进行混凝土浇筑的布料平台、以及用于进行混凝土抹面的抹面平台;所述布料平台下方锚固有与竖井共轴设置的中心筒,所述中心筒为可抵抗水平方向上向心的压力及离心的拉力的弹性筒,中心筒侧面设置有以中心筒为中心呈放射状排布的顶模框架梁,顶模框架梁顶撑在变径筒内壁上;步骤三:模板当前所在的空中段记作第n段,同时进行第n-1段的抹面与养护、第n段的混凝土浇筑、以及第n 1段的钢筋笼的绑扎;浇筑混凝土时,模板的侧面底部贴在n-1段上;步骤四:待步骤三浇筑的混凝土初凝,爬模施工系统上爬一段;上爬完成后,调整中心筒位置使之再次与竖井共轴;步骤五:循环进行步骤三与步骤四,直到完成整个竖井衬砌的施工。
8.进一步,所述布料平台边沿绕布料平台一周间隔设置有与布料平台固定连接的提升架,所述提升架上设置有爬模动力装置,所述爬模动力装置包括与提升架一一对应设置在提升架上并与提升架固定连接的穿心千斤顶、以及与穿心千斤顶一一对应并竖直穿设在穿心千斤顶中的支撑杆,所述支撑杆由多个分段自下而上逐节拼合并固定连接而成、且支撑杆下部埋设在竖井衬砌中,浇筑基础段时,支撑杆最下端的分段顶撑在竖井底并半埋在基础段中;所述提升架向下延伸并超过布料平台下边沿,竖井衬砌的模板套设在提升架外围并与提升架固定连接;所述中心筒上端顶撑在布料平台底部中央并与布料平台固定连接,所述顶模框架梁顶撑在布料平台下方、与提升架一一对应、一端与中心筒侧面固定连接、且另一端与对应的提升架固定连接;所述中心筒底部还设置有以中心筒为中心呈放射状排布、用于调整中心筒垂直度并避免布料平台中部下挠的张紧连接件,所述张紧连接件为伸缩杆或长度可调的绳索,每根张紧连接件两端分别与提升架侧面底部和中心筒侧面底部连接,且每个提升架至少与一根张紧连接件相连接;步骤四中,通过调整各张紧连接件的长度,使中心筒与竖井共轴。
9.进一步,步骤四中,穿心千斤顶伸长时带动整个爬模施工系统向上爬升,穿心千斤顶每次伸长前,先通过激光扫平仪在各支撑杆上同一标高的位置标记出穿心千斤顶的伸长终点,然后在伸长终点处安装用于避免穿心千斤顶过度伸长的限位器,所述限位器与支撑杆可拆卸地固定连接,所述穿心千斤顶的控制站设置在布料平台上。
10.进一步,所述竖井底部设置有激光器,所述中心筒下表面水平设置有靶圈面向下方的靶板,在中心筒底部中心位于竖井中轴线上时,所述激光器发出的激光穿过抹面平台上的避位口竖直向上对着中心筒下表面的靶板的靶心;所述中心筒内悬挂有尖部朝下的线锤、且中心筒内位于线锤下方的位置设置有与中心筒固定连接的靶板,在中心筒处于竖直状态时,所述线锤尖部竖直向下指向中心筒内的靶板上的靶心;步骤四中,通过调整各张紧连接件的长度,使激光器发出的激光竖直向上对着与激光器对应的靶板的靶心,且线锤正对与线锤对应的靶板,从而克服爬升过程中的偏位,使
中心筒与竖井再次共轴。
11.进一步,所述提升架包括自支撑杆水平向布料平台延伸、用于承载穿心千斤顶的横杆,以及自横杆靠近布料平台的一端竖直向下延伸的、用于连接模板的竖杆,所述横杆和竖杆固定连接;所述绑扎平台通过沿布料平台周向间隔设置的竖直钢管架设在布料平台上,各竖直钢管向上延伸超过绑扎平台的上表面,且竖直钢管位于绑扎平台上方的部分通过水平钢管连接为用于分类摆放钢筋的多层架。
12.进一步,所述变径筒结构中,变径筒的母线与竖直线的夹角的正切值为0.002-0.003。
13.进一步,所述中心筒为圆筒状的笼子,包括上下两端的型钢框架、以及沿中心筒周向间隔设置在中心筒的筒壁位置的竖直钢管,所述中心筒内沿竖直方向间隔设置有用于加强中心筒抵抗水平向心的压力的能力的水平加强板,所述水平加强板为带有弹性的钢板。
14.进一步,所述布料平台上设置有可绕中心筒的中轴线旋转的旋转布料机;所述旋转布料机包括通过旋转支柱架设在布料平台上的料斗,所述料斗一周呈放射状设置有用于将落入料斗的混凝土注入到模板内的溜槽,所述竖井内设置有用于为旋转布料机供料的混凝土泵管,所述混凝土泵管自竖井底部逐节向上拼合并通入料斗,所述混凝土泵管固定在竖井壁上。
15.进一步,所述顶模框架梁为贝雷桁架梁,所述溜槽上端与料斗的出料口铰接连接、并形成可抬起落下溜槽的悬挑端的结构,所述模板与提升架之间设置有用于调整模板与竖井壁的间距的模板位置调节器。
16.进一步,所述竖井内高于爬模施工系统的位置设置有用于运送施工材料及供施工人员上下主工作平台的吊笼,相邻主工作平台之间设置有爬梯,布料平台边沿设置有护栏及安全网。
17.本发明一种流水线式竖井内壁浇筑方法与现有技术相比,具有如下有益效果:本发明中,通过穿心千斤顶和支撑杆来支撑整个系统,不依赖混凝土承重,当前浇筑的混凝土初凝后就能进行爬升,无需等待混凝土完全凝固;提升了施工效率并缩短了工期;本发明中,混凝土初凝后就能进行爬升(模板受到的粘连比终凝时弱很多,模板易与混凝土分离),并通过有弹性的中心筒(也即中心筒允许发生轻微的形变,且形变为可恢复的弹性形变,混凝土的体积变化可由中心筒进行缓冲,从而减弱混凝土与模板的粘连)顶撑模板,且模板围合成上粗下细的变径筒结构(一则模板不会下滑,二则模板爬升的时候只需克服混凝土的粘连,无需克服混凝土的摩擦和握裹),使得爬升时无需退模;进一步提升了施工效率并缩短了工期;同时,通过激光扫平仪与锁定器确保爬升时各提升架顶部标高一致;通过张紧连接件(与测量用的线锤、激光器、靶板配合使用)确保每次爬升完成后,中心筒与竖井共轴,从而使得施工精度极高,使衬砌壁的所有横截面均为均匀的圆环;本发明中,通过有弹性的中心筒顶撑模板,且张紧连接件使得弹性筒中存在向外顶撑的预应力,从而使得模板被有效顶撑,避免涨模;提升了施工质量;本发明中,自上而下按施工先后顺序集成了竖井衬砌施工所需的所有施工器械及平台,施工时有如流水线,可一次性完成竖井衬砌施工,无需提前绑扎钢筋笼;进一步提升
了施工效率并缩短了工期。
附图说明
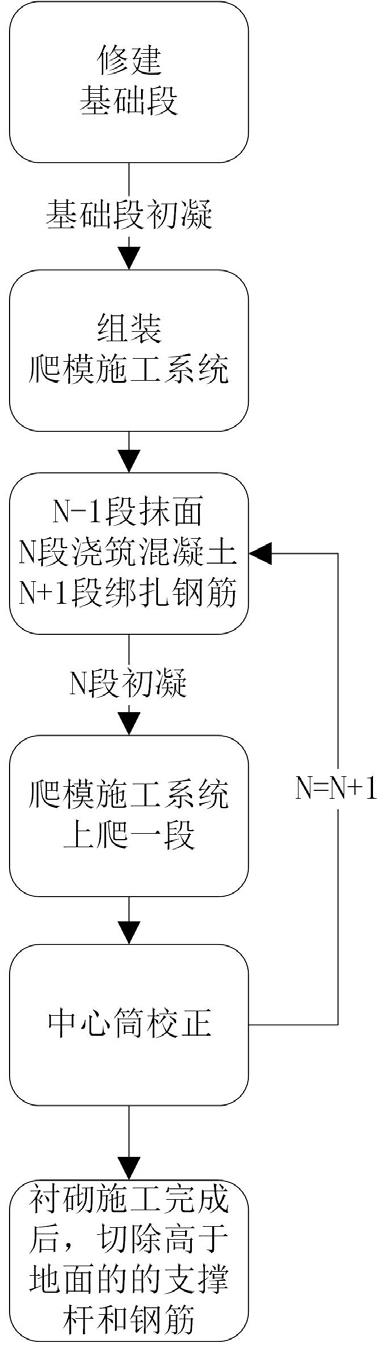
18.图1是本发明一种流水线式竖井内壁浇筑方法的施工流程图;图2是本发明一种流水线式竖井内壁浇筑方法的结构示意图,图中绘制了三名施工人员以方便理解,注意,为避免遮挡而影响读图,这三名施工人员调小了比例,同时,中心筒中的竖直钢管比实际的稀疏以免遮挡,且中心筒的线条进行了加粗以方便识别;其中,11-绑扎平台,12-布料平台,13-抹面平台,21-提升架,22-穿心千斤顶,23-支撑杆,31-模板,32-中心筒,33-顶模框架梁,34-张紧连接件,41-旋转布料机,42-混凝土泵管。
具体实施方式
19.如图1所示,一种流水线式竖井内壁浇筑方法,采用爬模施工系统在竖井内自下而上施工竖井衬砌,并包括以下步骤:步骤一:将竖井衬砌分成从一开始自下而上序号逐渐增大的多个施工段,第一个施工段记作基础段;爬模施工系统中的模板31围合成上粗下细的变径筒结构,序号大于一的各施工段的高度相同且均小于变径筒的高度,并记作空中段;完成基础段的施工,施工时以尚未组装到爬模施工系统中的模板31浇筑基础段的混凝土。
20.步骤二:基础段初凝后,拆模并在竖井底组装完成爬模施工系统;如图2所示,爬模施工系统包括三个水平设置、上下叠合、相互固定连接为一体、并用于承载施工人员进行作业的主工作平台,主工作平台自上而下依次为用于进行钢筋绑扎的绑扎平台11、用于进行混凝土浇筑的布料平台12、以及用于进行混凝土抹面的抹面平台13;这些平台是自上而下按施工先后顺序排布的,从而在施工的时候可以像流水线那样进行施工;本实施例中,模板31采用124系列弧形钢型模,也即钢面板采用4mm厚的q235钢板,竖向次肋为100
×
4mm钢板带,间距700mm;横向主肋和横边框均为宽120mm厚8mm的q235钢板带,间距300mm;竖边框为120
×
10mm钢带,模板31之间为平接口;布料平台12下方锚固有与竖井共轴设置的中心筒32,中心筒32为可抵抗水平方向上向心的压力及离心的拉力的弹性筒,中心筒32侧面设置有以中心筒32为中心呈放射状排布的顶模框架梁33,顶模框架梁33顶撑在变径筒内壁上。
21.步骤三:模板31当前所在的空中段记作第n段,同时进行第n-1段的抹面与养护、第n段的混凝土浇筑、以及第n 1段的钢筋笼的绑扎;浇筑混凝土时,模板31的侧面底部贴在n-1段上;本实施绑扎的钢筋笼,主要是竖井衬砌的人防段的钢筋笼,别的位置是素混凝土,当绑扎平台11正对的位置是素混凝土时,可以让绑扎平台11上的施工人员到别的主施工平台帮忙。
22.步骤四:待步骤三浇筑的混凝土初凝,爬模施工系统上爬一段;上爬完成后,调整中心筒32位置使之再次与竖井共轴。
23.步骤五:循环进行步骤三与步骤四,直到完成整个竖井衬砌的施工。
24.以下每个部件与其余部件之间均通过螺栓可拆卸连接:绑扎平台11、布料平台12、
抹面平台13、提升架21、穿心千斤顶22、模板31、中心筒32、顶模框架梁33、张紧连接件34;施工完毕后,衬砌施工完成后,切除高于地面的的支撑杆23和钢筋,使用模板31位置调节器完成退模,吊出爬模施工系统进行拆解并储藏,以备下次使用;布料平台12边沿绕布料平台12一周间隔设置有与布料平台12固定连接的提升架21,提升架21上设置有爬模动力装置,爬模动力装置包括与提升架21一一对应设置在提升架21上并与提升架21固定连接的穿心千斤顶22、以及与穿心千斤顶22一一对应并竖直穿设在穿心千斤顶22中的支撑杆23,支撑杆23由多个分段自下而上逐节拼合并固定连接而成、且支撑杆23下部埋设在竖井衬砌中,浇筑基础段时,支撑杆23最下端的分段顶撑在竖井底并半埋在基础段中;这里的支撑杆23与穿心千斤顶22所组成的爬模动力装置,不依赖衬砌的混凝土来承重,混凝土只是确保支撑杆23稳定的,因此混凝土初凝后即可进行爬升。混凝土初凝时间是可以通过早强剂等添加剂来调节的,只要不少于45分钟即可满足国家规定。而绑扎钢筋笼的工作是很慢的,浇筑完混凝土之后的等待时间内,可以让底下两层闲下来的施工人员都上去绑扎钢筋笼,钢筋笼绑扎完毕,混凝土也就初凝完成了,便可以爬升。钢筋笼除了一根钢筋一根钢筋地绑扎之外,还可以从上往下吊装成段的钢筋笼并进行连接;提升架21向下延伸并超过布料平台12下边沿,竖井衬砌的模板31套设在提升架21外围并与提升架21固定连接;中心筒32上端顶撑在布料平台12底部中央并与布料平台12固定连接,顶模框架梁33顶撑在布料平台12下方、与提升架21一一对应、一端与中心筒32侧面固定连接、且另一端与对应的提升架21固定连接;中心筒32底部还设置有以中心筒32为中心呈放射状排布、用于调整中心筒32垂直度并避免布料平台12中部下挠的张紧连接件34,张紧连接件34为伸缩杆或长度可调的绳索,每根张紧连接件34两端分别与提升架21侧面底部和中心筒32侧面底部连接,且每个提升架21至少与一根张紧连接件34相连接;本实施例中,设置6个提升架21,12个张紧连接件34,每个张紧连接件34包括两个通过花篮螺栓连一块的钢条,通过花篮螺栓调节长度。每个提升架21上对称安装两个张紧连接件34;这里的中心筒32的上半部分被向内压,而下半部分被向外拉,从而使得模板31受到一个向外顶的力同时也避免布料平台12中部下挠。布料平台12中部下挠主要是因为下面需要吊着抹面平台13,而上面还压着旋转布料机41。中心筒32可以选用钢管和型钢焊成的圆筒状笼子,上下两端是型钢框架,中间是沿筒壁一周间隔排布的竖直钢管;步骤四中,通过调整各张紧连接件34的长度,使中心筒32与竖井共轴。
25.步骤四中,穿心千斤顶22伸长时带动整个爬模施工系统向上爬升,穿心千斤顶22每次伸长前,先通过激光扫平仪在各支撑杆23上同一标高的位置标记出穿心千斤顶22的伸长终点,然后在伸长终点处安装用于避免穿心千斤顶22过度伸长的限位器24,限位器24与支撑杆23可拆卸地固定连接,穿心千斤顶22的控制站设置在布料平台12上。
26.竖井底部设置有激光器,中心筒32下表面水平设置有靶圈面向下方的靶板,仅在中心筒32底部中心位于竖井中轴线上时,激光器发出的激光穿过抹面平台13上的避位口竖直向上对着中心筒32下表面的靶板的靶心;可判断中心筒32底部是否偏移;中心筒32内悬挂有尖部朝下的线锤35、且中心筒32内位于线锤35下方的位置设置有与中心筒32固定连接的靶板,仅在中心筒32处于竖直状态时,线锤35尖部竖直向下指向中心筒32内的靶板上的靶心;可判断中心筒32是否倾斜;
步骤四中,通过调整各张紧连接件34的长度,使激光器发出的激光竖直向上对着与激光器对应的靶板的靶心,且线锤35正对与线锤35对应的靶板,从而克服爬升过程中的偏位,使中心筒32与竖井再次共轴。测量是否共线和调整张紧连接件34的过程都是在抹面平台13上进行的。
27.提升架21包括自支撑杆23水平向布料平台12延伸、用于承载穿心千斤顶22的横杆,以及自横杆靠近布料平台12的一端竖直向下延伸的、用于连接模板31的竖杆,横杆和竖杆固定连接;绑扎平台11通过沿布料平台12周向间隔设置的竖直钢管架设在布料平台12上,各竖直钢管向上延伸超过绑扎平台11的上表面,且竖直钢管位于绑扎平台11上方的部分通过水平钢管连接为用于分类摆放钢筋的多层架。这里的竖杆是型钢,具有弹性,可进一步提供顶撑模板31的预应力。
28.变径筒的母线与竖直线的夹角的正切值为0.002-0.003。这个倾斜程度能够在确保竖井的衬砌不会发生肉眼可见的形变的同时使得爬升无需先退模。
29.支撑杆23上高于穿心千斤顶22的位置可拆卸地固定有用于标记穿心千斤顶22每次伸长的终点的限位器24,布料平台12上设置有用于确保限位器24处于同一高度的激光扫平仪,穿心千斤顶22的控制站设置在布料平台12上。爬模的每次爬升,穿心千斤顶22都要伸长缩短好几次,穿心千斤顶22伸长时,带动整个爬模施工系统向上爬升一小段。在穿心千斤顶22伸长前先用激光扫平仪确定限位器24位置,安装完限位器24后再伸长。这里限位器24是箍在支撑杆23上的抱箍。穿心千斤顶22每个循环带动爬模每次提升30cm左右,每次约10min,单个施工段需5个循环。
30.本实施例中,穿心千斤顶22为gyd-60型滚珠穿心式液压千斤顶,支撑杆23为和穿心千斤顶22配套购买的φ48
×
3.5mm钢管,二者组成配套的爬模动力装置,可直接成套购买。相邻两根钢管螺接,钢管长度分4种,分别是4m、4.5m、5m、和6m,支撑杆23接头高度位置尽可能错开。控制站为ykd-36型液压控制站。
31.中心筒32内沿竖直方向间隔设置有用于加强中心筒32抵抗水平向心的压力的能力的水平加强板,抹面平台13通过锚固在中心筒32下方的吊柱吊挂在布料平台12下方。这里水平加强板是有弹性的钢板,如图2所示,线锤35挂在最下方的水平加强板下,而靶板设置在中心筒32下端的型钢框架上。本实施例中只设置了一层水平加强板。
32.布料平台12上设置有可绕中心筒32的中轴线旋转的旋转布料机41。除此之外,混凝土振捣棒也设置在布料平台12上。旋转布料机41包括通过旋转支柱架设在布料平台12上的料斗,料斗一周呈放射状设置有用于将落入料斗的混凝土注入到模板31内的溜槽,竖井内设置有用于为旋转布料机41供料的混凝土泵管42,混凝土泵管42自竖井底部逐节向上拼合并通入料斗,混凝土泵管42固定在竖井壁上。旋转支柱依靠推力轴承实现旋转,溜槽底部通过支撑小车滑动设置在布料平台12上。
33.这里混凝土布料机一般不能旋转360度,因为在实际使用场景中,溜槽之间有着各种各样的障碍物,比如混凝土泵管42,比如提升架21,比如液压设备。但由于这种放射状排布的溜槽的存在,无需旋转360度即可完成布料。一般而言设置6个溜槽即可确保混凝土布料机在有障碍物存在的情况下完成布料,这个时候溜槽下端依然不能扫过浇筑仓的所有位置,但未被扫过的区域很小,依靠混凝土的流动性以及后续的振捣可以弥补。
34.溜槽上端与料斗铰接连接、形成可抬起放下溜槽下端的结构。这样做的好处有三
方面,其一在于可以通过抬起放下溜槽来适应不同直径的竖井,具体可通过垫高或放低混凝土布料机来实现;其二在于可以抖落溜槽中的混凝土;其三在于可以折叠以方便运输。
35.溜槽通过槽托杆与料斗连接,槽托杆平行于溜槽锚固在溜槽底部、上端与料斗铰接连接、且下端通过支撑小车架设在安装基面上,支撑小车的行进方向为绕斗支撑架设置的圆。支撑柱上端通过双耳板及销轴与料斗铰接连接,下端同样通过双耳板及平行于上端的销轴的销轴与支撑小车铰接连接,以确保溜槽抬高后下端的支撑小车的轮子顺利接触安装基础。
36.混凝土泵管42为ф216
×
3.5mm钢管,单节长3m,采用法兰盘螺栓连接。混凝土泵管42安装在离开挖面50~75cm处,为安全固定混凝土泵管42,混凝土泵管42中间与井字架盘扣水平横向固定,层高间距为2m一环。为安全固定混凝土泵管42,水平横向连接钢管与已浇筑混凝土采用柔性棉顶紧。为避免超径石块进入泵管引起堵塞,在混凝土泵管42下部进料口用ф12圆钢焊接成10cm
×
10cm的格栅网滤料。爬模每爬升3m,就安装一节泵管,施工人员可站在布料平台12上进行操作。
37.也就是说,竖井依靠从井底供应混凝土,这样便不必提前安装混凝土泵管42。竖井不是单独的一个井,井底是有诸如联络通道、横通道之类的结构的,混凝土可从这里泵入竖井。
38.顶模框架梁33为贝雷桁架梁,模板31与提升架21之间设置有用于调整模板31与竖井壁的间距的模板31位置调节器。模板31位置调节器可以是垫块或者垂直于模板31的螺栓。
39.贝雷桁架方便调节长度,而溜槽铰接可以调节溜槽的悬挑端与浇筑仓的距离,二者结合,从而确保混凝土有效入仓并适应不同尺寸的竖井。
40.竖井内高于爬模施工系统的位置设置有用于运送施工材料及供施工人员上下主工作平台的吊笼,相邻主工作平台之间设置有爬梯。布料平台12边沿设置有护栏及安全网,另外两个主工作平台不用设置有护栏及安全网,因为边沿完全被模板31封死了,什么都掉不下去,且施工过程中不退模。不设置护栏及安全网在安全上也没有任何问题,且方便施工人员活动。
41.以上所述的实施例仅仅是对本发明的优选实施方式进行描述,并非对本发明的范围进行限定,在不脱离本发明设计精神的前提下,本领域普通技术人员对本发明的技术方案作出的各种变形和改进,均应落入本发明权利要求书确定的保护范围内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。