技术特征:
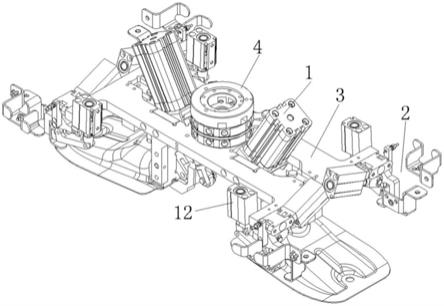
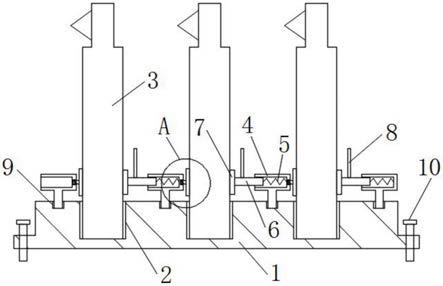
1.一种用于待焊接工件转移的机器人抓手,机器人抓手包括连接机器人关节组件的转换部,其特征在于,所述的转换部上设置基板,基板上设置第一抓手和第二抓手,第一抓手包括安装在基板上的第一气缸、第二气缸和第一支板,第一气缸铰接夹板,夹板与第一支板之间夹持第一工件,夹板铰接摇板,摇板铰接安装在第一支板上,第二气缸连接顶杆,顶杆顶住第一工件的中部;第二抓手包括安装在基板侧部的连接块,连接块的两端分别铰接第四气缸的安装座和固定板,第四气缸的伸缩轴铰接固定板,固定板的侧部铰接第三气缸的安装座,第三气缸的伸缩轴铰接活动板,活动板与固定板铰接并夹持第二工件。2.根据权利要求1所述的一种用于待焊接工件转移的机器人抓手,其特征在于,所述的第一抓手对称设置两个且以转换部为中心,第二抓手设有四个且位于基板的四个边角。3.根据权利要求1所述的一种用于待焊接工件转移的机器人抓手,其特征在于,所述的第一气缸倾斜安装,第二气缸和第一支板均垂直于基板设置,顶杆与第一支板平行设置。4.根据权利要求3所述的一种用于待焊接工件转移的机器人抓手,其特征在于,所述的第一气缸通过伸缩轴铰接夹板,该伸缩轴与顶杆之间的夹角为锐角。5.根据权利要求4所述的一种用于待焊接工件转移的机器人抓手,其特征在于,所述的摇板两端分别铰接第一支板和夹板。6.根据权利要求1所述的一种用于待焊接工件转移的机器人抓手,其特征在于,所述的连接块两端设置的通孔平行,连接块两端通过通孔分别铰接固定板的转动部和第四汽缸的安装座。7.根据权利要求6所述的一种用于待焊接工件转移的机器人抓手,其特征在于,所述的第四气缸的伸缩轴铰接侧板,侧板通过螺栓连接固定板上的螺孔。8.根据权利要求7所述的一种用于待焊接工件转移的机器人抓手,其特征在于,所述的侧板与固定板垂直,固定板上设置的第一枢孔和第二枢孔的轴线平行,第一枢孔铰接活动板的中部,第二枢孔铰接第三气缸的安装座。9.根据权利要求8所述的一种用于待焊接工件转移的机器人抓手,其特征在于,所述的第三气缸通过伸缩轴铰接活动板的一端,活动板的另一端与固定板的限位部相互配合以夹持第二工件。10.根据权利要求1-9任一所述的一种用于待焊接工件转移的机器人抓手,其特征在于,所述的第一工件为壳体件,第二工件为弯折板,壳体件和弯折板通过机器人抓手转移至焊接夹具上夹持并完成焊接。
技术总结
本实用新型公开了一种用于待焊接工件转移的机器人抓手,机器人抓手包括连接机器人关节组件的转换部,所述的转换部上设置基板,基板上设置第一抓手和第二抓手,第一抓手包括安装在基板上的第一气缸、第二气缸和第一支板,第一气缸铰接夹板,夹板与第一支板之间夹持第一工件,夹板铰接摇板,摇板铰接安装在第一支板上,第二气缸连接顶杆,顶杆顶住第一工件的中部;第二抓手包括安装在基板侧部的连接块,连接块的两端分别铰接第四气缸的安装座和固定板,第四气缸的伸缩轴铰接固定板,固定板的侧部铰接第三气缸的安装座,第三气缸的伸缩轴铰接活动板,活动板与固定板铰接并夹持第二工件。本装置同步抓取两组工件,配合焊接夹具,提高工作效率。高工作效率。高工作效率。
技术研发人员:余鹏 包春晶
受保护的技术使用者:广东诺巴特智能设备有限公司
技术研发日:2021.12.29
技术公布日:2022/5/25
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。