1.本公开总体上涉及的领域包括车辆诊断系统。
背景技术:
2.车辆可包括自主驾驶系统。与“自动驾驶车辆”相关联的自主驾驶系统可包括单个传感器或多个传感器,包括测量、读取、接收、编译、计算或以其他方式处理来自内部源和外部源的数据的传感器。传感器可用于评估车辆位置和辨识本地物体(local object)。自主驾驶系统可通过内部软件或电子状态以及系统诊断检查来验证传感器准确性。
技术实现要素:
3.若干个说明性变型可包括一种用于自主驾驶系统中的系统或传感器诊断检查的方法或产品。
4.一种产品可包括自主驾驶系统,该自主驾驶系统可包括至少一个传感器,所述传感器被构造和布置成接收和解释来自本地标识的数据以在自主驾驶系统或车辆中执行系统或传感器诊断检查。
5.一种产品可包括自主驾驶系统,该自主驾驶系统可包括至少一个传感器,所述传感器被构造和布置成接收和解释来自本地标识的数据以在自主驾驶系统或车辆中执行地理诊断检查。
6.一种产品可包括车辆,其可包括至少一个传感器;至少一个标识;并且其中,可包括至少一个传感器的车辆可被构造和布置成识别车辆的地理位置与所述至少一个标识的地理位置之间的差异。
7.一种方法可包括以下步骤:提供车辆,该车辆可包括至少一个传感器;提供至少一个标识,所述标识被构造和布置成向所述至少一个传感器传达所述至少一个标识的已知的地理位置;经由所述至少一个传感器确定车辆的检测到的地理位置;读取所述至少一个标识的已知的地理位置;将检测到的地理位置与已知的地理位置相比较;以及识别检测到的地理位置与已知的地理位置之间的差异。
8.一种方法可包括以下步骤:提供车辆,该车辆可包括多个传感器;提供至少一个结构,所述结构可包括至少一个标识,所述标识被构造和布置成向所述多个传感器传达所述至少一个标识的已知的地理位置;经由所述多个传感器确定车辆的检测到的地理位置;读取如由所述至少一个标识传达的已知的地理位置;将检测到的地理位置与已知的地理位置相比较;以及识别检测到的地理位置与已知的地理位置之间的差异。
9.本公开的范围内的其他说明性变型将从下文中提供的详细描述变得显而易见。应理解的是,虽然公开了本发明的变型,但是详细描述仅旨在用于说明的目的并且不旨在限制本发明的范围。
附图说明
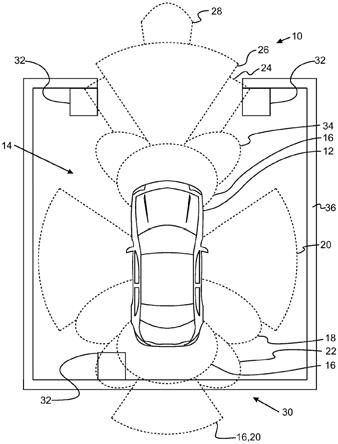
10.从详细描述和附图中,本发明的范围内的变型的选择示例将变得被更充分地理解,附图中:图1描绘了说明性变型,其中可包括至少一个传感器的车辆可被构造和布置成接收和解释来自固定结构中的本地标识的数据。
11.图2描绘了说明性变型,其中可包括至少一个传感器的车辆可被构造和布置成接收和解释来自本地标识的数据。
具体实施方式
12.变型的以下描述本质上仅仅是说明性的,并且不以任何方式旨在限制本发明的范围、其应用或用途。
13.在若干个说明性变型中,用于货物或乘客的车辆可由源自马达的汽车动力向前驱动,该马达将储存能量源转化为用于车辆的驱动力,诸如但不限于内燃发动机、电池供能的发动机、燃料电池供能的发动机、或者用于为乘客或货物车辆提供汽车驱动动力的任何其他已知的马达。由马达进行的储存能量的转化所产生的驱动力可从马达传达到车辆将沿其行驶的驱动介质,诸如但不限于一片土地、道路、水路、航路、或车辆已知沿其行驶通过空间的任何其他介质。驱动力从马达到驱动介质的传达可经由所驱动的机动车辆移动的任何器件发生,诸如但不限于行走轮、胎面、脚轮、滚子、螺旋桨、气体推进器、液体推进器或离子驱动的推进器、或者所驱动的机动车辆移动的任何其他已知的器件。
14.在若干个说明性变型中,一种用于货物或乘客的车辆可包括至少一个传感器。所述至少一个传感器可包括与自主驾驶系统、车辆、汽车、环境数据收集系统等相关联的任何数量的传感器。所述至少一个传感器可包括与货物或乘客车辆相关联的传感器,诸如停车辅助传感器、盲点检测传感器、环绕物传感器、碰撞警告传感器、交通标志或信号辨识传感器、紧急制动、行人检测、防撞传感器、或十字路口交通传感器。所述至少一个传感器可包括雷达、激光雷达、相机、全球定位系统(gps)、全球导航卫星系统(gnss)、环境传感器等。所述至少一个传感器可执行关于检测、读取、辨识或解释与本地标识相关联的数据的多种功能。
15.如本文中所使用的,“标识”可广义地指代信息的各种显示物,但也可广义地包括传感器、装置、或者用于传达信息的其他技术。至少一个标识可包括固定标识,其可包括可检测的、可读的、可辨识的、或可解释的数据,该数据呈例如但不限于以下各形式:qr码、条形码、矩阵条形码、字母数字码、符号、或标签、或者其他非视觉可检测的、可读的、可辨识的、或可解释的数据。所预期的是,标识可包括任何器件,其中数据或信息可通过所述器件能够由所述至少一个传感器检测、读取、辨识、或解释。标识可呈任何数量的物理形式,诸如直立的街道标识、悬挂的标识、刷漆的或印刷的地面标识。标识可以是静态的、移动的或可移动的。
16.如本文中所使用的,即使在由描述性形容词修饰时,“道路”也可指代传统的驾驶路面,诸如但不限于混凝土或柏油路,但也可指代用于货物或乘客的车辆可沿其行驶或行驶通过其的任何驾驶表面或介质,诸如但不限于水、冰、雪、泥土、泥巴、空气或者其他气体、或一般而言空间。
17.如本文中所使用的,“操作环境”和“结构”可两者或单独地也广义地指代车行道、
高速公路、街道、路径、停车场、停车结构、隧道、桥梁、交通路口、住宅车库或商业车库。所预期的是,操作环境可包括车辆可通达的任何位置或空间。
18.在若干个说明性变型中,一种车辆可包括:转向系统,其包括转向接口;以及一组可转向的行走轮。转向系统可以是电动助力转向类型,其中物理连杆将转向接口的操纵机械地传达到可转向轮。转向系统可以是线控转向类型,其中物理机构不将转向接口的操纵机械地传达到可转向的行走轮,并且其中,转向接口的操纵经由电子装置的通信来影响可转向的行走轮的相关联的操纵,所述电子装置诸如但不限于传感器、收发器和电子激励的致动器。在若干个说明性变型中,转向输入可包括用户或驾驶员可用来通过用户的或驾驶员的身体的一部分来使车辆转向的任何部件,该部分可包括至少一只手和/或至少一只脚。转向接口可包括但不限于至少一个转向轮或特定车轮、操纵杆/控制杆、一个或多个脚踏板、或者一个或多个车轮扭矩或推进杆、臂或控制装置。这种转向接口可用于控制具有与用于使车辆转向或推进车辆的车轮的功能类似的功能的其他形式的部件。
19.在若干个说明性变型中,车辆的转向系统也可以是自主的,因为车辆可在没有来自驾驶员的辅助或干扰的情况下使自身朝向已传达到它的预定位置转向。车辆的转向系统可具有避障系统,该避障系统允许车辆感测其路径中的物体并避开它们。车辆的转向系统可具有允许车辆规划车辆路径的轨迹规划系统。在一些情况下,车辆的驾驶员可能期望辅助车辆避开物体或者改变车辆的方向(诸如,改变驾驶车道)而不首先以某种其他方式将该期望传达到车辆。在这种情况下,驾驶员可控制驾驶员侧转向系统控制件并辅助自主转向系统。
20.在若干个说明性变型中,一种车辆包括自主驾驶系统,该自主驾驶系统可用任何数量的逻辑模块编程,其中所述逻辑模块布置成自主地解决车辆转向和行驶的范围(realm)内的若干个控制区域,包括但不限于车辆加速度、车辆制动、轨迹规划、以及用于车辆的控制的自主转向系统。车辆和自主驾驶系统可包括gps或gnss(广义地被称为地理定位系统),以绘制(map)轨迹、位置、确定速度、加速度、制动、时间、以及与车辆相关的其他各种数据。
21.在若干个说明性变型中,车辆可对至少一个传感器执行诊断测试,使得车辆可验证所述至少一个传感器正确地运行。车辆可包括与已知标识的预定的地理位置相关的数据。车辆可通过以下方式对至少一个传感器执行诊断测试:检测、读取、辨识或解释在固定的、预定的地理位置处的本地标识,和将所读取的标识与所述特定标识的已知的、预定的地理位置相比较。所读取的标识与已知的、预定的地理位置之间的任何数据差异都可被利用来诊断和补偿所述至少一个传感器中的不准确或误差。
22.参考图1和图2,示出了说明性变型,其中车辆12可包括自主驾驶系统10,该自主驾驶系统10可包括至少一个传感器14。所述至少一个传感器14可包括停车辅助传感器16、盲点传感器18、环绕物传感器20、碰撞警告传感器22、交通信号辨识传感器24、紧急制动、行人检测、或防撞传感器26、十字路口交通传感器34、或者其他自主驾驶传感器28。车辆12可在操作环境30中操作,操作环境30诸如车行道、高速公路、街道、路径、停车场、停车结构或车库。所预期的是,操作环境30可包括车辆12可通达的任何位置。操作环境30可包括至少一个标识32,并且可包括至少一个结构36。车辆12可被构造和布置成依赖于至少一个传感器14来检测、读取、辨识或解释至少一个标识32。所述至少一个标识32可被构造和布置成提供与
所述至少一个标识32的位置相关的可检测的、可读取的、可辨识的、或可解释的数据。
23.作为非限制性示例并且如图2中所描绘的,车辆12的驾驶员或用户可将车辆12停止或停放在结构36中。替代地,车辆12的驾驶员或用户可将车辆12停止在交通信号处、停车场中等。车辆12可包括至少一个传感器14,所述传感器14可包括地理定位系统38或地理定位系统功能。交通信号或结构36可包括可与已知的地理位置相关联的至少一个标识32。车辆12可通过以下方式对至少一个传感器执行诊断测试:检测、读取、辨识或解释在已知的地理位置处的至少一个标识32,并将所读取的至少一个标识32数据与所述至少一个标识32的已知的地理位置相比较。所述至少一个标识32的已知的地理位置可本地地存储在车辆内或远程地存储,并且可经由基于云的系统或类似系统传达到车辆12。所读取的标识32地理位置与标识32的已知的地理位置之间的任何差异均可被利用来诊断和补偿所述至少一个传感器14中的不准确或误差。所预期的是,至少一个标识32的已知的地理位置的已知变化将需要车辆12的对应变化和至少一个传感器14的预期的标识辨识。
24.作为非限制性示例并且如图1和图2中所描绘的,车辆12的驾驶员或用户可在结构36中启动车辆12。结构36可包括至少一个标识32,所述标识32可包括已知的地理位置。车辆12可通过以下方式对至少一个传感器14执行诊断测试:检测、读取、辨识或解释在已知的地理位置处的至少一个标识32,并将所读取的至少一个标识32数据与至少一个标识32的已知的地理位置相比较。以这种方式,车辆12可验证在驾驶员和车辆12可离开结构36之前所述至少一个传感器正常运行。
25.作为附加的非限制性示例,结构36可包括至少一个标识32,所述标识32被构造和布置成向车辆12的至少一个传感器14传达至少一个已知的地理位置。结构36可以是住宅家庭(residential home)、车库、车辆维修店、车辆销售点、车辆经销商等。车辆可包括地理定位系统或地理定位系统功能。驾驶员可启动车辆12并且车辆12可通过读取所述至少一个标识32并将所读取的至少一个标识32的地理位置与所述至少一个标识32的已知的地理位置相比较以对所述至少一个传感器14执行诊断测试。以这种方式,车辆12可验证在驾驶员和车辆12可离开结构36之前所述至少一个传感器正常运行。
26.对变体的以下描述仅是被认为在本发明的范围内的部件、元件、动作、产品和方法的说明,并且不以任何方式意图通过具体公开或未明确阐述的内容来限制这种范围。如本文中所描述的部件、元件、动作、产品和方法可以以如本文中明确描述的方式之外的方式组合和重新排列,并且仍然被认为在本发明的范围内。
27.变型1可包括一种产品,该产品可包括:车辆,其可包括至少一个传感器;至少一个标识;并且其中,可包括至少一个传感器的车辆可被构造和布置成识别车辆的地理位置与所述至少一个标识的地理位置之间的差异。
28.变型2可包括变型1的产品,其中,所述至少一个传感器可以是地理位置传感器。
29.变型3可包括变型1至2中的任一者中的产品,其中,所述至少一个传感器可包括地理定位系统功能。
30.变型4可包括变型1至3中的任一者中的产品,其中,所述至少一个标识可包括以下各项中的至少一项:qr码、条形码、矩阵条形码、字母数字码、符号、或标签、或者其他非视觉可检测的、可读的、可辨识的、或可解释的数据。
31.变型5可包括变型1至4中的任一者中的产品,其中,可包括至少一个传感器的车辆
可被构造和布置成生成表示检测到的地理位置与已知的地理位置之间的差异的存在的警报。
32.变型6可包括变型1至5中的任一者中的产品,其中,可包括至少一个传感器的车辆可进一步被构造和布置成调整所述至少一个传感器以补偿车辆的地理位置与所述至少一个标识的地理位置之间的差异,使得所述至少一个传感器正确地检测车辆的与所述至少一个标识的地理位置的地理位置大约相同的地理位置。
33.变型7可包括一种方法,该方法可包括以下步骤:提供车辆,该车辆可包括至少一个传感器;提供至少一个标识,所述标识被构造和布置成向所述至少一个传感器传达所述至少一个标识的已知的地理位置;经由所述至少一个传感器确定车辆的检测到的地理位置;读取所述至少一个标识的已知的地理位置;将检测到的地理位置与已知的地理位置相比较;以及识别检测到的地理位置与已知的地理位置之间的差异。
34.变型8可包括变型7中的方法并且可进一步包括调整所述至少一个传感器以补偿检测到的地理位置与已知的地理位置之间的差异,使得所述至少一个传感器正确地检测与所述至少一个标识的已知的地理位置的地理位置大约相同的地理位置。
35.变型9可包括变型7至8中的任一者中的方法,其中,所述至少一个传感器可以是地理位置传感器。
36.变型10可包括变型7至9中的任一者中的方法,其中,所述至少一个传感器可包括地理定位系统功能。
37.变型11可包括变型7至10中的任一者中的方法,其中,所述至少一个标识可包括以下各项中的至少一项:qr码、条形码、矩阵条形码、字母数字码、符号、或标签、或者其他非视觉可检测的、可读的、可辨识的、或可解释的数据。
38.变型12可包括一种方法,该方法可包括以下步骤:提供车辆,该车辆可包括多个传感器;提供至少一个结构,所述结构可包括至少一个标识,所述标识被构造和布置成向所述多个传感器传达所述至少一个标识的已知的地理位置;经由所述多个传感器确定车辆的检测到的地理位置;读取如由所述至少一个标识传达的已知的地理位置;将检测到的地理位置与已知的地理位置相比较;以及识别检测到的地理位置与已知的地理位置之间的差异。
39.变型13可包括变型12中的方法并且可进一步包括生成表示检测到的地理位置与已知的地理位置之间的差异的存在的警报。
40.变型14可包括变型12至13中的任一者中的方法,可进一步包括:调整所述至少一个传感器以补偿检测到的地理位置与已知的地理位置之间的差异,使得所述至少一个传感器正确地检测与所述至少一个标识的已知的地理位置的地理位置大约相同的地理位置。
41.变型15可包括变型12至14中的任一者中的方法,其中,所述至少一个传感器可以是地理位置传感器。
42.变型16可包括变型12至15中的任一者中的方法,其中,所述至少一个传感器可包括地理定位系统功能。
43.变型17可包括变型12至16中的任一者中的方法,其中,所述至少一个标识可包括以下各项中的至少一项:qr码、条形码、矩阵条形码、字母数字码、符号、或标签、或者其他非视觉可检测的、可读的、可辨识的、或可解释的数据。
44.在本发明的范围内的选择变型的以上描述本质上仅仅是说明性的,且因此,其变
型或变体将不被视为背离本发明的精神和范围。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。