触摸控制器、触摸屏驱动电路和触摸屏驱动电路操作方法
1.相关申请的交叉引用
2.本技术要求于2020年11月18日在韩国知识产权局提交的韩国专利申请no.10-2020-0154702的优先权,该申请的公开以引用方式全文并入本文中。
技术领域
3.符合示例实施例的方法、设备和系统涉及驱动触摸屏,并且更具体地,涉及用于驱动触摸屏的触摸控制器、触摸屏驱动电路以及操作触摸屏驱动电路的方法。
背景技术:
4.触摸屏可包括用于图像显示的显示面板和用于触摸感测的触摸面板,并且显示面板和触摸面板可以竖直地堆叠或者可以通过共享至少一层而整体形成。随着触摸屏减小,显示面板和触摸面板之间的距离减小,因此,两个面板的电极之间的寄生电容可增加。寄生电容可在触摸感测或图像显示期间引起噪声,并且噪声可降低触摸感测灵敏度或使显示图像的质量劣化。因此,需要一种驱动触摸屏的方法,其可以降低由于寄生电容引起的噪声。
技术实现要素:
5.示例实施例提供了一种提高触摸感测灵敏度的触摸控制器、触摸屏驱动电路和操作触摸屏驱动电路的方法。
6.根据示例实施例的一方面,提供了一种用于驱动触摸屏的触摸屏驱动电路,触摸屏包括显示层和显示层上的触摸传感器层。触摸屏驱动电路包括:触摸控制器,其被配置为在驱动时段中,将多个驱动信号分段提供至触摸传感器层的多个第一电极,其中在驱动时段的第一子时段中,多个驱动信号的相位同步;以及显示驱动电路,其被配置为在驱动时段的第一子时段中,将多个补偿信号提供至显示层的多条源极线中的至少一些,其中在第一子时段中,多个补偿信号与多个驱动信号反向相位同步。
7.根据示例实施例的一方面,提供了一种用于驱动显示面板上堆叠的触摸传感器阵列的触摸控制器。所述触摸控制器包括:控制器,其被配置为接收显示时序信号,并且基于显示时序信号生成触摸感测控制信号;以及驱动电路,其被配置为基于触摸感测控制信号将具有第一频率的多个驱动信号分别提供至触摸传感器阵列的多个驱动电极,其中,在将具有第一极化和第一频率的补偿信号提供至显示面板的多条源极线的第一时段中,多个驱动信号具有与第一极化相反的第二极化。
8.根据示例实施例的一方面,提供了一种操作触摸屏驱动电路以驱动触摸屏的方法,触摸屏包括显示层和位于显示层上的触摸传感器层。该方法包括:在驱动时段中,将多个驱动信号分别提供至触摸传感器层的多个第一电极,其中,多个驱动信号在驱动时段的第一子时段中相位同步;以及在驱动时段的第一子时段中,将补偿信号提供至显示层的多条源极线,其中,在第一子时段中,补偿信号与多个驱动信号反向相位同步。
附图说明
9.将结合附图从以下示例实施例的详细描述中更清楚地理解以上和其它方面、特征和优点,在附图中:
10.图1是根据示例实施例的触摸屏装置的框图;
11.图2是设置在根据示例实施例的触摸屏装置中的触摸面板、显示面板、触摸控制器和显示驱动电路的示图;
12.图3是图1的触摸屏的层的示图;
13.图4a和图4b是根据示例实施例驱动触摸屏的方法的时序图;
14.图5是根据比较例的驱动触摸屏的方法的时序图;
15.图6a和图6b是影响触摸感测的形成在触摸屏中的寄生组件的示图;
16.图7a是根据示例实施例的驱动触摸屏的方法装置的示图;
17.图7b是根据示例实施例的施加至屏幕装置的信号的波形图;
18.图8a是根据示例实施例的源极驱动器的示意性框图;
19.图8b是根据示例实施例的在图8b的空白时段和显示驱动时段中源极驱动器中使用的信号的时序图;
20.图9是根据示例实施例的触摸控制器的编码操作的示图,其中可以通过图2的编码器执行图9的操作;
21.图10是根据示例实施例的触摸控制器的解码操作的示图;
22.图11是示出根据示例实施例的基于哈达玛(hadamard)矩阵重叠被编码并且输出的驱动信号中的一些的时序图;
23.图12是根据示例实施例的操作驱动触摸屏的触摸屏驱动电路的方法的流程图;
24.图13是根据示例实施例的触摸屏装置的示图;以及
25.图14和图15是根据示例实施例的触摸屏驱动电路的示图。
具体实施方式
26.将参照附图详细描述示例实施例。
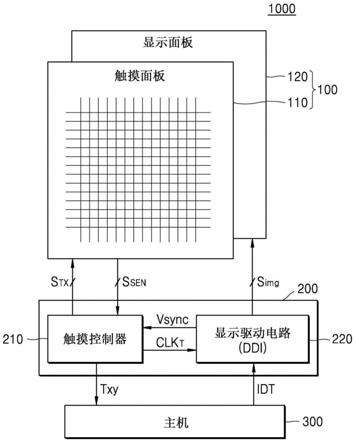
27.图1是根据示例实施例的触摸屏装置1000的框图。
28.触摸屏装置1000可以在各种电子设备中实施。例如,触摸屏装置1000可以设置在平板个人计算机(pc)、电子阅读器、个人数字助理(pda)、便携式多媒体播放器(pmp)、移动终端、智能电话、可穿戴装置、物联网(iot)装置、冰箱、导航装置等中。另外,触摸屏装置1000可以安装在车辆、家具、制造设备、门、各种测量装置等中。
29.参照图1,触摸屏装置1000可包括触摸屏100和用于驱动触摸屏100的触摸屏驱动电路200(即,驱动电路),并且触摸屏100可包括触摸面板110和显示面板120,并且可以提供触摸感测和显示功能。驱动电路200可包括触摸控制器210和显示驱动集成电路(ddi)220。虽然图1示出了触摸屏装置1000包括主机300,但是示例实施例不限于此,并且主机300可以与触摸屏装置1000分开实施。
30.触摸屏100可以显示图像并且接收用户的触摸输入。触摸屏100可以作为电子设备的输入/输出装置操作。在示例实施例中,触摸屏100还可包括指纹传感器,并且触摸屏装置1000可以执行指纹识别功能。
31.触摸面板110可以感测触摸屏100上的触摸或触摸输入并且输出感测信号。触摸不仅可包括导电对象(例如,用户的手指或手掌、触摸笔、手写笔等)在触摸屏100上的直接接触,还可以包括导电对象相对于触摸屏100的靠近。触摸面板110可以堆叠在显示面板120上,或者附着于显示面板120的前表面上,该前表面是例如发射光学信号的表面。在示例实施例中,触摸面板110可以覆盖显示面板120的前表面。
32.触摸面板110可以实施为具有触敏表面的透明面板。可替换地,触摸面板110可以实施为包括按照图案布置的多个透明电极的触摸传感器阵列。例如,触摸面板110可以被称作触摸传感器阵列或者触摸感测层。
33.触摸面板110可包括按照矩阵布置的多个电极。可以通过多个电极输出根据各种触摸感测方法之一的感测信号。在示例中,多个电极可以根据电容感测方法输出感测信号。
34.例如,触摸面板110可包括向其施加驱动信号s
tx
的多个驱动电极和从其输出感测信号s
sen
的多个接收电极,驱动电极可以在第一方向(例如,x轴方向或者y轴方向)上延伸,多个感测电极可以在第二方向(例如,y轴方向或者x轴方向)上延伸。驱动电极和感测电极可以彼此交叉,并且可以在驱动电极与感测电极之间形成互电容。
35.在另一示例中,触摸面板110可包括按照矩阵布置的感测电极,并且可以在感测电极中的每一个中形成电容。例如,可以在感测电极中的每一个与地或者触摸屏装置1000中的导电层之间形成电容,并且电容可以被称作自电容。可以将驱动信号s
tx
施加至感测电极中的每一个,并且还可以从感测电极中的每一个输出感测信号s
sen
。换句话说,感测电极中的每一个可以作为驱动电极和接收电极操作。
36.可以通过驱动电极施加驱动信号s
tx
,可以基于驱动信号s
tx
生成指示电容(例如互电容或自电容)的感测信号s
sen
,并且可以通过接收电极中的每一个输出感测信号s
sen
。当诸如人的手指或者手写笔的导电对象触摸或接近电极时,与触摸的电极相对应的电容可以改变,并且从触摸面板110输出的感测信号s
sen
可以根据改变后的电容改变。例如,与生成触摸之前的电平相比,感测信号s
sen
的电平可以增大或减小。
37.显示面板120可包括多条栅极线、多条源极线和按照矩阵布置在栅极线和源极线彼此交叉的位置处的多个像素。像素可以基于通过源极线和栅极线接收的图像信号s
img
显示图像。图像可以根据设定的帧率更新。
38.显示层可以布置在显示面板120(例如,背板)下方,并且公共电极可以布置在显示面板120上方。公共电极可以设置在显示层与触摸传感器阵列之间。栅极线和源极线以及像素可以形成在显示层中。共同地提供至显示面板120的像素的电压(例如地电压)可以施加至公共电极。
39.显示面板120可以实施为液晶显示器(lcd)、发光二极管(led)显示器、有机led(oled)显示器、有源矩阵oled(amoled)显示器、电致变色显示器(ecd)、数字镜装置(dmd)、致动镜装置(amd)、光栅光阀(glv)、等离子显示面板(pdp)、电致发光显示器(eld)、真空荧光显示器(vfd)或各种其他类型的平板或柔性面板中的一种。
40.尽管图1示出了触摸面板110和显示面板120是分开的组件,但是示例实施例不限于此。例如,触摸屏100可以实现为触摸面板110的电极和显示面板120的像素彼此耦接的单元内类型面板,或者触摸面板110的电极布置在显示面板120上方的单元上类型面板。
41.触摸控制器210可以扫描(例如,驱动和感测)触摸面板110。触摸控制器210可以向
触摸面板110(即,触摸传感器阵列)提供驱动信号s
tx
,并从触摸面板110接收基于驱动信号s
tx
生成的感测信号s
sen
。触摸控制器210可基于感测信号识别触摸输入或识别生成触摸输入的位置(即,触摸坐标t
xy
),并将触摸坐标t
xy
提供给主机300。在示例实施例中,触摸控制器210可以识别触摸压力,并向主机300提供具有触摸坐标t
xy
的触摸压力。
42.ddi 220可以从主机300接收图像数据idt,并且驱动显示面板120,使得在显示面板120上显示与图像数据idt相对应的图像。ddi220可以将图像数据idt转换为作为模拟信号的图像信号s
img
,并且将图像信号s
img
提供至显示面板120的对应的像素。
43.在根据示例实施例的触摸屏装置1000中,触摸控制器210可以按照多驱动方法驱动触摸面板110。触摸控制器210可以通过对脉冲信号(例如,具有特定周期并在高电平和低电平之间切换的信号或基于特定矩阵或代码的特定频率的正弦波信号)进行编码来生成驱动信号s
tx
,并且将驱动信号stx同时应用于多个电极,例如,驱动电极。触摸控制器210可以通过基于特定矩阵(例如,特定矩阵的逆矩阵)对从电极(例如,接收电极)接收的感测信号s
sen
进行解码,来生成与多个驱动信号相对应的多个触摸值。
44.在被施加驱动信号的所有驱动时段中的一个时段(例如,第一子时段)中,驱动信号的相位可相同,或者驱动信号的相位之和可大于零。在所有驱动时段中的另一时段(例如,第一子时段之后的第二子时段)中,驱动信号中的一些驱动信号的相位可相同,驱动信号中的其他一些驱动信号的相位可与一些驱动信号的相位相反,并且驱动信号的相位之和可以为零。因此,驱动信号的相位之和大于零的时段(例如,第一子时段)可称为不平衡驱动时段,并且驱动信号相位和为零的时段(例如,第二子时段)可称为平衡驱动时段。
45.触摸控制器210可以确定触摸面板110的驱动时序,使得驱动时段的第一子时段(即,不平衡驱动时段)被包括在显示面板120中图像未被更新的时段(例如,空白时段)中,并且ddi 220可以在不平衡驱动时段中将补偿信号施加至显示面板120的源极线中的至少一些。该补偿信号在不平衡驱动时段中可以具有与施加至驱动电极的驱动信号相同的频率和相反的相位。
46.触摸控制器210和ddi 220可以发送/接收同步信号、状态信息等。例如,ddi 220可以将指示显示时序的信号(例如,竖直同步信号vsync)提供至触摸控制器210。触摸控制器210可为ddi 220提供触摸感测时序信息,例如,触摸时钟信号clk
t
。触摸控制器210和ddi 220可以通过基于同步信号中的一个或多个(例如,竖直同步信号vsync)和触摸时钟信号clk
t
被彼此同步来操作。例如,触摸控制器210可以基于竖直同步信号vsync在显示面板120中无图像被更新的时段中执行不平衡驱动,并且ddi 220可以基于触摸时钟信号clk
t
生成具有与驱动信号相同的频率和相反的相位的补偿信号,并且通过源极线输出补偿信号。
47.主机300可以对触摸屏装置1000执行整体控制操作。主机300可以基于从触摸控制器210接收的数据(例如,触摸生成、触摸坐标t
xy
、触摸压力(强度)等)生成与显示操作相关的数据,基于以上解释触摸,并根据触摸位置和强度执行控制操作。主机300可以基于控制操作生成与显示操作相关的数据。
48.在示例实施例中,主机300可包括应用处理器(ap),ap可以实现为片上系统(soc)。soc可以包括采用具有标准总线规范的协议的系统总线,并且可以包括连接到系统总线的各种知识产权(ip)。作为系统总线的标准规范,可以采用各种类型的规范,诸如高级risc机器(arm)的高级微控制器总线架构(amba)协议等。
49.图2是根据示例实施例的触摸屏装置中设置的触摸面板110、显示面板120、触摸控制器210和ddi 220的示图。
50.参照图2,触摸面板110可包括可被称作感测电极的多个驱动电极te和多个接收电极re。在示例实施例中,接收电极re可以在第一方向(例如,x轴方向)上延伸,并且驱动电极te可以在第二方向(例如,y轴方向)上延伸。第一方向和第二方向是彼此正交的方向,并且接收电极re和驱动电极te可以彼此交叉。可以在驱动电极te与接收电极re之间形成互电容cm。
51.为了改善触摸感测特性(例如,触摸感测灵敏度),感测电极的单位电极(例如,驱动电极te和/或接收电极re)可以具有特定形状,例如,如图2所示的菱形形状或图案。
52.触摸控制器210可包括驱动电路211、接收电路212、触摸处理器或控制器213、编码器215和解码器216。
53.驱动电路211可包括多个发送器,例如,第一发送器至第四发送器tx1、tx2、tx3和tx4。第一发送器tx1至第四发送器tx4可以将驱动信号提供至驱动电极te。如以上参照图1的描述,发送器tx1至tx4(其可以是设置在驱动电路211中的全部或一些发送器)可以将驱动信号同时施加至与其对应的驱动电极te。换句话说,可以将多个驱动信号同时施加至驱动电极te。
54.编码器215可以基于矩阵(例如,哈达玛矩阵)或代码对参考信号(例如,具有特定频率的脉冲信号)进行编码。编码器215可以基于经过编码的参考信号生成多个驱动信号。驱动信号可以在一些时段具有相同的相位,而在一些其它时段具有不同的相位。
55.接收电路212可包括多个接收器rx,接收器rx可以从接收电极re接收多个感测信号。接收器rx中的每一个可以连接至一个对应的接收电极re,以接收感测信号,或者以分时方式连接至至少两个接收电极re,以接收至少两个感测信号。
56.感测信号可以指示被施加驱动信号的驱动电极te与接收感测信号的接收电极re之间的互电容cm。例如,当在触摸面板110上的一点处出现触摸时,该点处的互电容cm可以减小,因此,与触摸生成之前的电平相比,感测信号的电平可以减小或增大。
57.接收器rx可以通过对接收到的感测信号进行放大和模数转换来生成感测值。接收器rx可以生成多个感测值。
58.解码器216可以从接收器rx接收感测值,并且可以基于由编码器215对参考信号进行编码所使用的矩阵或代码对接收的感测值进行解码。例如,解码器216可通过将感测值乘以矩阵的逆矩阵来生成触摸值。触摸值可指示被施加驱动信号的驱动电极te与接收电极re之间的多个互电容中的每一个。
59.在示例实施例中,触摸面板110可包括点感测电极,点感测电极中的每一个作为驱动电极和感测电极两者操作。点感测电极可以按照矩阵布置,并且点感测电极中的每一个可被称为点传感器。发送器tx和接收器rx可被集成地实现为分别向多个点传感器提供驱动信号和从多个点传感器接收感测信号。
60.触摸处理器213可以控制触摸控制器210的整体操作,例如,驱动电路211和接收电路212的操作时序。此外,触摸处理器213可以基于从解码器216接收到的触摸值识别触摸、触摸生成位置和触摸强度(压力)等。触摸处理器213还可以向驱动电路200提供触摸感测时序信息,例如,图1的触摸时钟信号clk
t
。
61.显示面板120可包括显示层121和公共电极122,显示层121可形成在显示面板120的衬底上,公共电极122可以形成在显示层121上。显示层121可包括多条栅极线或扫描线gl和多条源极线或数据线sl,并且栅极线gl可以在第一方向(例如,x轴方向)上延伸,并且源极线sl可以在第二方向(例如,y轴方向)上延伸。多个像素可以形成在源极线sl与栅极线gl彼此交叉的多个点处。
62.可以将公共电压施加至公共电极122,并且公共电压可为特定电平的电压,例如,地电压。
63.ddi 220可包括时序控制器221、源极驱动器222和栅极驱动器223。
64.时序控制器221可以控制源极驱动器222和栅极驱动器223的操作,例如,将指示操作时序的时序信号或者控制信号提供至源极驱动器222和栅极驱动器223。此外,时序控制器221可以从图1的主机300接收图像数据idt,通过根据显示面板120结构的像素结构执行例如图像质量处理、数据格式改变等来处理图像数据idt,以及以线为单位将经处理的图像数据idt提供至源极驱动器222。此外,时序控制器221可以将指示显示时序的信号(例如,竖直同步信号vsync)提供至触摸控制器210。竖直同步信号vsync可以指示在显示面板120中更新图像的帧时段或者没有图像被更新的时段(例如,空白时段或者边沿(porch)时段)。
65.栅极驱动器223可以包括多个缓冲器bf,并且缓冲器bf中的每一个可以向显示面板120的栅极线gl提供激活电平的栅极信号。例如,栅极驱动器223可以顺序地向栅极线gl提供激活电平的栅极信号,使得栅极线gl被顺序地驱动。
66.源极驱动器222可包括多个源极放大器sa或者沟道放大器,源极放大器sa可以将图像信号(例如,源极电压vsrc)提供至显示面板120的源极线sl。源极放大器sa可以将图像信号提供至源极线sl中对应的源极线sl,并且源极放大器sa可以将图像信号同时提供至源极线sl。在示例实施例中,源极放大器sa可以以分时方式将图像信号提供至两条或更多条源极线sl。
67.当将激活电平的栅极信号被施加至对应的栅极线gl时,栅极线gl与源极线sl之间连接的像素中的每一个可以基于通过对应的源极线sl接收的图像信号(例如,灰度电压)输出光学信号。因此,可以在显示面板120上显示图像。
68.图3是图1的触摸屏100的层的示图。
69.参照图3,触摸屏100可包括衬底sub、显示层121、公共电极122和触摸面板110或触摸传感器阵列。然而,示例实施例不限于此,触摸屏100还可包括设置在上述组件之间的一个或多个附加层。此外,触摸屏100还可包括布置在触摸面板110上的顶部玻璃。
70.衬底sub可包括在第一方向(例如,x轴方向)和第二方向(例如,y轴方向)上延伸的第一表面s1。显示层121、公共电极122和触摸面板110可在垂直于衬底sub的第一表面s1的第三方向(例如,z轴方向)上堆叠。如图所示,公共电极122可以设置在显示层121与触摸面板110之间。
71.可以在触摸面板110的多个电极(例如,驱动电极te和接收电极re)与公共电极122之间形成寄生电容(例如,c
tx
和c
rx
),并且可以在显示层121的源极线sl和栅极线gl与公共电极122之间形成寄生电容(例如,cs和cg)。
72.由于公共电极122可以布置在显示层121上方,并且可能具有薄厚度,以允许从像素发射的光从其通过,因此难以充分降低公共电极122的电阻值。当邻近公共电极122的电
极(例如,驱动电极te、源极线sl或栅极线gl)的电势切换时,根据其的噪声分量可流入公共电极122,并且公共电极122的rc延迟可不会快速发射噪声分量,从而公共电极122的电压电平可变化。换句话说,可以在公共电极122的电压电平中生成噪声。在公共电极122的电压电平中生成的噪声的一部分可以流入触摸面板110的电极,例如,接收电极re或驱动电极te。
73.最近,在诸如智能电话或可折叠电话的各种移动装置中,为了扩大显示形状因子或电池空间,显示面板120的厚度逐渐减小,并且包括显示面板120的触摸屏100的尺寸逐渐增大。随着显示面板120和触摸面板110之间的距离减小,两个面板的电极之间的寄生电容(例如cs、c
tx
、c
rx
和cg)可以增大。
74.在向驱动电极施加具有相同相位的多个驱动信号的不平衡驱动时段中,由于驱动电极和公共电极之间的寄生电容,显示面板120的公共电极122的电压电平可以波动,而不是保持不变。例如,由于多个驱动信号引起的噪声可以流入公共电极122。当显示面板120被驱动(即,图像被更新),而公共电极的电压电平波动时,图像的质量可劣化。此外,由于公共电极122的噪声可流入触摸面板110的电极(例如,接收电极re),因此触摸感测灵敏度可变差。
75.然而,如上参照图1所述,根据驱动触摸屏100的方法,即操作根据示例实施例的触摸屏装置1000的驱动电路200的方法,可以在触摸控制器210不更新显示面板120中的图像的时段(例如空白时段)期间执行不平衡驱动。在这种状态下,由于ddi 220将具有与多个驱动信号相同的频率和相反的相位的多个补偿信号应用于显示面板的多条源极线中的至少一些。因此,可以防止公共电极的电压电平的波动,即,防止噪声渗入公共电极。由于可以保持电极的电压电平恒定,因此可以提高触摸感测灵敏度。
76.图4a和图4b是根据示例实施例的驱动触摸屏的方法的时序图。图5是根据比较例的驱动触摸屏的方法的时序图。为了便于解释,下面的描述还参照了图2。
77.参照图2和图4a,触摸控制器210的驱动电路211可为驱动电极te提供多个驱动信号。例如,在驱动时段t
drv
中,驱动电路211的第一发送器tx1至第四发送器tx4中的每一个可以将基于哈达玛矩阵编码的第一驱动信号s
tx1
至第四驱动信号s
tx4
施加至触摸面板110的四个驱动电极te。驱动时段t
drv
可以基于复位信号фrst被划分为第一时段t1至第四时段t4或者第一子时段至第四子时段。
78.第一驱动信号s
tx1
至第四驱动信号s
tx4
各自可包括由“1”表示的第一脉冲信号和/或由
“‑
1”表示的第二脉冲信号。第一脉冲信号的相位和第二脉冲信号的相位可以彼此相反。第一脉冲信号可以被称作正极化的脉冲信号,第二脉冲信号可以被称作负极化的脉冲信号。
79.在第一时段t1中,第一驱动信号s
tx1
至第四驱动信号s
tx4
全部可包括第一脉冲信号。在第二时段t2中,第一驱动信号s
tx1
和第三驱动信号s
tx3
各自可包括第一脉冲信号,而第二驱动信号s
tx2
和第四驱动信号s
tx4
各自可包括第二脉冲信号。在第三时段t3中,第一驱动信号s
tx1
和第二驱动信号s
tx2
各自可包括第一脉冲信号,第三驱动信号s
tx3
和第四驱动信号s
tx4
各自可包括第二脉冲信号。在第四时段t4中,第一驱动信号s
tx1
和第四驱动信号s
tx4
各自可包括第一脉冲信号,第二驱动信号s
tx2
和第三驱动信号s
tx3
各自可包括第二脉冲信号。
80.第一时段t1可以被包括在没有执行显示的时段(例如空白时段或边沿时段)中。没有执行显示可意味着在显示面板120中没有执行图像更新。如图4a所示,竖直同步信号
vsync是逻辑高的时段可以指示空白时段,竖直同步信号vsync为逻辑低的时段可指示显示时段或显示驱动时段。第一时段t1可包括在竖直同步信号vsync为逻辑高的时段中。
81.在空白时段中,ddi 220的栅极驱动器223可以不操作。然而,如图4a所示,在包括在空白时段中的第一时段t1中,源极驱动器222可以将补偿信号s
con
作为源极电压vs施加到显示面板120的源极线sl中的至少一个。补偿信号s
con
可以具有与第一脉冲信号相同的频率和相反的相位。例如,当第一驱动信号s
tx1
至第四驱动信号s
tx4
在第一时段t1期间包括第一脉冲信号时,补偿信号s
con
可在第一时段t1期间包括第二脉冲信号。
82.可以在空白时段之后(例如,在第二时段t2至第四时段t4中)执行显示驱动。源极驱动器222可以向源极线sl输出用于显示驱动的源极电压vs(例如,灰度电压),并且栅极驱动器223可以工作。
83.在第二时段t2至第四时段t4中作为第一驱动信号s
tx1
至第四驱动信号s
tx4
输出的第一脉冲信号的数量和第二脉冲信号的数量相等。因此,在第二时段t2至第四时段t4中,第一驱动信号s
tx1
至第四驱动信号s
tx4
的相位之和可为“0”。第一驱动信号s
tx1
至第四驱动信号s
tx4
对图2的公共电极122的影响可以彼此抵消,因此,公共电极122的电压vcom可以保持恒定。
84.在第一时段t1中,第一驱动信号s
tx1
至第四驱动信号s
tx4
全部可包括第一脉冲信号,并且第一驱动信号s
tx1
至第四驱动信号s
tx4
的相位之和可以大于或小于“0”。
85.根据基于图5的比较例的驱动触摸屏的方法,在第一时段t1中,ddi 220的源极驱动器222和栅极驱动器223可以不操作。因此,在第一时段t1中,补偿信号s
con
未被施加至源极线sl。在第一时段t1中,第一驱动信号s
tx1
至第四驱动信号s
tx4
全部可包括第一脉冲信号。因此,第一脉冲信号可以彼此重叠,并且重叠的信号可以影响公共电极122。如图所示,当第一驱动信号s
tx1
至第四驱动信号s
tx4
切换时,可在公共电极122的电压vcom中生成例如毛刺噪声的噪声。
86.然而,根据图4a的根据示例实施例的驱动触摸屏的方法,在第一时段t1中,将与第一脉冲信号相位相反的补偿信号s
con
施加至至少一条源极线sl。因此,第一驱动信号s
tx1
至第四驱动信号s
tx4
对公共电极122的影响和补偿信号s
con
对公共电极122的影响可以彼此抵消。因此,在第一时段t1中,公共电极122的电压vcom可以保持恒定。
87.虽然图4a示出了第一时段t1被包括在空白时段中,第二时段t2至第四时段t4被包括在显示驱动时段中,但是示例实施例不限于此。如图4b所示,第二时段t2至第四时段t4也可以被包括在空白时段中,即,没有执行显示驱动的时段。然而,在第一时段t1中,补偿信号s
con
可被施加至至少一条源极线sl,在第二时段t2至第四时段t4中,补偿信号s
con
未被施加至源极线sl。在第二时段t2至第四时段t4中,源极驱动器222可以不操作。
88.图6a和图6b是影响触摸感测的形成在触摸屏中的寄生组件的图。
89.参照图6a,可以在触摸面板110的驱动电极te与接收电极re之间形成互电容cm。可以在显示面板120的公共电极122与驱动电极te和接收电极re之间形成寄生电容c
tx
和c
rx
。可以在公共电极122与源极线sl之间形成寄生电容cs。
90.像素px可包括选择晶体管ts、驱动晶体管td、数据电容器c
dt
和有机发光二极管(oled)。选择晶体管ts的一端可以连接至源极线sl,其另一端可以连接至驱动晶体管td的栅极端子。选择晶体管ts的栅极端子可以连接至栅极线gl。
91.可以将第一电源电压elvdd施加至驱动晶体管td的一端,驱动晶体管td的另一端可以连接至oled的阳极。数据电容器c
dt
可以连接至驱动晶体管td的所述一端和栅极端子。oled的阴极可以连接至公共电极122,可以将第二电源电压elvss施加至公共电极122。例如,第二电源电压elvss的电压电平可以低于第一电源电压elvdd的电压电平,例如,第二电源电压elvss可为地电压。公共电极122可包括电阻组件,例如,寄生电阻器r
com
。
92.图6b是图6a的触摸屏100的等效模型。
93.参照图6b,驱动电极te和接收电极re可以分别模型化为寄生电阻器r
tx
和r
rx
,像素px可以被模型化为可变电阻器rd和可变电容器cd的并联结构以及与该并联结构连接的输出电阻ro。可变电阻器rd和可变电容器cd可以根据在驱动晶体管td中流动的电流量而变化。
94.当发送器tx将驱动信号s
tx
施加到驱动电极te时,根据驱动信号s
tx
的感测信号s
sen
可通过寄生电阻器r
tx
、互电容器cm和寄生电阻r
rx
被输入到接收器rx。接收器rx可以由包括放大器amp的积分器电路实现。感测信号s
sen
可以被输入到放大器amp的一端(-),并且用于去除公共噪声的公共电压v
cn
可以施加到放大器amp的另一端( )。
95.通过在驱动电极te和公共电极122之间形成的寄生电容c
tx
,根据驱动信号s
tx
的噪声可流入公共电极122。由于在接收电极re和公共电极122之间形成的寄生电容器c
rx
,噪声可流入接收电极re并干扰感测信号s
sen
以被输入到接收器rx。
96.然而,补偿信号s
con
可以被施加至源极线sl,并且由于在源极线sl和公共电极122之间形成的寄生电容cs,根据补偿信号s
con
的噪声可流入公共电极122。由于驱动信号s
tx
和补偿信号s
con
的相位彼此相反,根据驱动信号s
tx
的噪声和根据补偿信号s
con
的噪声可彼此抵消。因此,感测信号s
sen
可以具有指示基于驱动信号s
tx
感测的互电容cm的值,并且可以不包括根据驱动信号s
tx
的噪声和根据补偿信号s
con
的噪声。
97.图7a是根据示例实施例的驱动触摸屏的方法装置的示图。图7b是根据示例实施例的施加至屏幕装置的信号的波形图。
98.详细地说,图7a示出了在不平衡驱动时段中的源极线驱动方法,图7b示出了在不平衡驱动时段中的驱动信号、公共电极电压和源极电压。
99.参照图7a和图7b,在触摸面板110中,驱动电极te可以在第一方向(例如,x轴方向)上布置,并且可以在第二方向(例如,y轴方向)上延伸。在显示面板120中,源极线sl可以在第一方向上布置,并且可以在第二方向上延伸。驱动电极te和源极线sl可以在相同方向上延伸。驱动电极te之间的间距(即,彼此邻近的驱动电极te之间的距离)可以比源极线sl之间的间距更长。因此,多条源极线(例如,第一源极线sl1至第n源极线sln(其中n是大于或等于2的整数))可以布置在显示层123上的与触摸面板(触摸传感器层)110的一个驱动电极te所位于的第一区域a1相对应的第二区域a2中。第一区域a1和第二区域a2可为在第三方向(例如,z轴方向)上彼此竖直重叠的区域。
100.在不平衡驱动时段(例如,驱动时段t
drv
的图4a的第一时段t1)中,当第一发送器tx1将第一驱动信号s
tx1
施加至驱动电极te时,第一源极放大器sa1至第n源极放大器san可以将补偿信号s
con
作为第一源极电压vs1至第n源极电压vsn施加至第一源极线sl1至第n源极线sln。
101.在公共电极122中,满足下面的等式1以抵消第一驱动信号s
tx1
和补偿信号s
con
的相
互驱动的效果。
102.[等式1]
[0103]ctx
×stx1
=-n
×cs
×scon
[0104]
第一驱动信号s
tx1
和补偿信号s
con
具有相反相位。根据等式1,可以基于电容c
tx
和cs、第一驱动信号s
tx1
的电压电平或摆动宽度vsw1和驱动源极线的数量(n)确定补偿信号s
con
的电压电平或摆动宽度vsw2。
[0105]
例如,假设电容c
tx
为约450皮法(pf),电容cs为20pf,在第一区域a1中布置一个驱动电极,在与第一区域a1相对应的第二区域a2中布置二百(200)条源极线sl,并且当补偿信号s
con
以约1.35v摆动时,第一驱动信号s
tx1
以约12v摆动,第一驱动信号s
tx1
和补偿信号s
con
对公共电极122的相互驱动的效果可以抵消,因此,公共电极122的电压vcom可以保持恒定。
[0106]
图8a是根据示例实施例的源极驱动器的示意性框图。图8b是在图8b的空白时段和显示驱动时段中在源极驱动器中使用的信号的时序图。
[0107]
参照图8a,源极驱动器222可包括输出级21、数模转换(dac)块22、电平移位器23、移位寄存器24和灰度电压生成器25。
[0108]
移位寄存器24可以存储与图2的显示面板120的像素相对应的像素信号(像素数据),并且响应于源极时序信号tsrc(例如,水平同步信号hsync),移位寄存器24可以输出像素信号。电平移位器23可以将像素信号的电平改变为可以在dac块22中使用的电平。灰度电压生成器25可以根据由像素信号指示的分辨率生成多个灰度电压。例如,当像素信号为8比特数据时,灰度电压生成器25可以生成28(即,二百五十六(256))个灰度电压。可以将多个灰度电压提供至dac块22。
[0109]
dac块22可包括多个数模转换器(dac)26,并且dac 26中的每一个可以将从电平移位器23接收到的像素信号转换为对应的灰度电压。dac块26可以从灰度电压中选择和输出与像素信号相对应的灰度电压,从而将像素信号转换为对应的灰度电压。因此,作为数字信号的像素信号可以转换为作为模拟信号的灰度电压。
[0110]
输出级21可包括多个感测放大器sa,感测放大器sa中的每一个可以从与其相对应的dac块26接收灰度电压,并且缓冲灰度电压(例如,电流放大)以作为源极电压输出。感测放大器sa可以将多个源极电压输出至多条源极线。例如,多个感测放大器sa可包括n个源极放大器,其中n是大于或等于二的整数。n个源极放大器sa可以将第一源极电压vs1至第n源极电压vsn输出至n条源极线sl。
[0111]
参照图8b,在显示驱动时段dp中,水平同步信号hsync用作源极时序信号tsrc,并且移位寄存器24可以响应于水平同步信号hsync输出存储的像素信号。水平同步信号hsync可以指示图1的显示面板120的一行被驱动的时段。随着响应于水平同步信号hsync输出与对应的行相对应的像素信号,与像素信号相对应的灰度电压vgs可与水平同步信号hsync同步并且被输出至源极线。
[0112]
在空白时段bp中,从图1的触摸控制器210接收的触摸时钟信号clk
t
可以用作源极时序信号tsrc。在示例实施例中,当触摸时钟信号clk
t
处于高电平或者从低电平改变为高电平时,移位寄存器24可以输出指示补偿信号s
con
的低电平的信号,并且当触摸时钟信号clk
t
处于低电平或者从高电平改变为低电平时,移位寄存器24可以输出指示补偿信号s
con
的高电平的信号。因此,与指示补偿信号s
con
的高电平或低电平的信号相对应的灰度电压可
被输出至多条源极线(例如,第一源极线sl1至第n源极线sln)中的至少一些,并且随着响应于源极时序信号tsrc交替地输出指示高电平的第一灰度电压和指示低电平的第二灰度电压,包括第一灰度电压和第二灰度电压的补偿信号s
con
可被提供至至少一条源极线。
[0113]
图9是根据示例实施例的触摸控制器的编码操作的示图。可以在图2的编码器215中执行图9的操作。
[0114]
参照图9,编码器215可以对发送电压vtx执行脉冲调制。发送电压vtx可以是dc电压。作为脉冲调制的结果,可以生成具有发送电压vtx的特定幅度和脉冲信号的频率的脉冲信号。
[0115]
编码器215可以基于矩阵对多个脉冲信号进行编码。作为编码的结果,编码器215可以生成多个驱动信号s
tx
,多个驱动信号s
tx
是根据矩阵中的行或列的大小被输出为多个信号的多信号。
[0116]
在示例实施例中,编码器215可基于哈达玛矩阵或哈达玛代码执行编码。编码器215可基于矩阵对多个脉冲信号进行编码或调制。
[0117]
哈达玛矩阵是一个方阵,其中构成矩阵的所有元素的值为“1”或
“‑
1”,矩阵中的两个列向量相互正交。哈达玛矩阵与其逆矩阵相同。
[0118]
哈达玛矩阵以哈达玛矩阵作为第一行第一列、第一行第二列、第二行第一列的元素,并且以哈达玛矩阵作为第二行第二列的元素。可以根据哈达玛矩阵的原理容易地生成h1、h2、h4和h8。例如,哈达玛矩阵h4和h8可以由等式2和3表示。
[0119]
[等式2]
[0120][0121]
[等式3]
[0122][0123]
哈达玛矩阵h的特征在于,在除了第一列或第一行之外的所有行和列中,每行中元素的总和或每列中元素的总和为零。
[0124]
由于驱动信号s
tx
的电压在与任何一列(例如,第一列)相对应的点处被加强,因此通过使用哈达玛矩阵h生成的驱动信号s
tx
可引起高电平的噪声。类似地,驱动信号s
tx
的电压在除了与通过使用哈达玛矩阵h生成的驱动信号s
tx
的第一列相对应的点之外的其他点处彼此抵消,因此可以降低噪声电平。
[0125]
虽然哈达玛矩阵h可用于编码,但示例实施例不限于此,哈达玛矩阵h被用作每行的元素之和或每列的元素之和为“0”的矩阵的代表性示例,因此,具有接近上述特征的特征
的各种矩阵可用于编码。
[0126]
图10是根据示例实施例的触摸控制器的解码操作的示图。可以在图2的解码器216中执行图10的操作。
[0127]
参照图10,可以在四个驱动电极te与一个接收电极re之间形成第一互电容至第四互电容c
m1
、c
m2
、c
m3
和c
m4
。
[0128]
可以通过四个驱动电极te施加相同的驱动信号s
tx
。可以基于哈达玛矩阵h4对驱动信号stx编码。例如,在图2的第一时段t1中,可以将各自具有与“1”相对应的脉冲信号的驱动信号s
tx
施加至四个驱动电极te,在图2的第二时段t2中,具有分别与“1”、
“‑
1”、“1”和
“‑
1”相对应的脉冲信号的驱动信号s
tx
可被施加至四个驱动电极te,在图2的第三时段t3中,具有分别与“1”、“1”、
“‑
1”和
“‑
1”相对应的脉冲信号的驱动信号s
tx
可被施加至四个驱动电极te,在图2的第四时段t4中,具有分别与“1”、
“‑
1”、
“‑
1”和“1”相对应的脉冲信号的驱动信号s
tx
可被施加至四个驱动电极te。
[0129]
接收器rx可以接收根据由于触摸引起的互电容的变化而生成的感测信号。例如,在第一时段t1中,接收的感测信号的元素值为y1,在第二时段t2中,接收的感测信号的元素值为y2,在第三时段t3中,接收到的感测信号的元素值是y3,在第四时段t4中,接收到的感测信号的元素值是y4。
[0130]
可以使用用于对驱动信号s
tx
进行编码的哈达玛矩阵h4的逆矩阵
[0131]
例如,感测信号的元素[y1,y2,y3,y4]可与哈达玛矩阵h4和第一互电容至第四互电容c
m1
、c
m2
、c
m3
和c
m4
的矩阵乘积成正比。可以基于将哈达玛矩阵h4的逆矩阵乘以指示感测信号的矩阵的结果来计算第一互电容至第四互电容c
m1
、c
m2
、c
m3
和c
m4
。
[0132]
图11是根据示例实施例的基于哈达玛矩阵重叠被编码且被输出的驱动信号中的一些的时序图。
[0133]
当图1的触摸面板110中包括的驱动电极的数量不是二的幂时,不能照原样使用作为方阵且行和列的数量为2k的哈达玛矩阵
[0134]
根据示例实施例,当驱动电极的数量大于2的k次幂且小于2的k 1次幂(其中k是自然数)时,图2的编码器215可以基于通过将具有2的k次幂的行和列的第一哈达玛子矩阵与第二哈达玛子矩阵部分叠加生成的矩阵对驱动信号stx进行编码。
[0135]
例如,当连线至触摸面板110的驱动电极的数量为七时,由于小于七且最大的二的幂为四,因此可以使用4
×
4的哈达玛矩阵h4。
[0136]
在示例实施例中,当驱动电极的数量为七时,哈达玛矩阵h4可以覆盖驱动信号s
tx1
至s
tx7
中的一些(s
tx1
至s
tx4
)。可以基于除哈达玛矩阵的第一列以外的其它列生成驱动信号s
tx1
至s
tx7
中的未被覆盖的其它驱动信号s
tx5
至s
tx7
。通过利用相同的哈达玛矩阵h4将两个哈达玛矩阵h4叠加使得仅叠加一个第一元素“1”,因此,可以基于生成的矩阵生成驱动信号s
tx4
至s
tx7
。第四驱动信号s
tx4
可以被施加两次,并且由第一次施加的第四驱动信号stx4感测到的电容值可用于计算由驱动信号s
tx5
至s
tx7
感测到的电容。
[0137]
这样,可以在空白时段中执行不平衡驱动,并且可以在其他时段中(例如,在显示时段中)执行平衡驱动。
[0138]
当用于通过使用哈达玛矩阵生成驱动信号的驱动电极的数量大于2k时,与以
上描述相似,可以通过使用哈达玛矩阵生成2k个驱动信号,并且可以基于除哈达玛矩阵的第一列以外的其它列生成其它驱动信号。可以在空白时段中执行不平衡驱动,并且可以在其他时段中执行平衡驱动。
[0139]
图12是根据示例实施例的操作驱动触摸屏的触摸屏驱动电路的方法的流程图。可以在图1的驱动电路200中执行图12的操作方法,因此,可以应用参照图1至图11描述的内容。
[0140]
参照图12,触摸控制器210的编码器215可以通过对具有特定频率的多个脉冲信号进行编码生成多个驱动信号(s110)。例如,编码器215可以通过使用特定矩阵(例如,哈达玛矩阵)执行编码。驱动信号可以全部包括具有相同相位的部分。
[0141]
触摸控制器210的驱动电路211可以在驱动时段中将驱动信号同时施加至触摸传感器层,或者触摸面板110的多个第一电极(例如,驱动电极te)(s120)。
[0142]
ddi 220的源极驱动器222可以在驱动时段的第一子时段中将具有与驱动信号中的每一个相反的相位的多个补偿信号施加至显示层的多条源极线中的每一条(s130)。在第一子时段中,驱动信号的所有的相位可以相同,或者驱动信号的相位和可以大于或小于零。补偿信号可以具有与驱动信号相同的频率和相反的相位。
[0143]
触摸控制器210的接收电路212可以对从触摸传感器层的多个第二电极(例如,接收电极re)接收的多个感测信号进行采样(s140)。
[0144]
接收电路212可以将经过采样的感测信号模数转换为多个感测值(s150)。
[0145]
触摸控制器210的解码器216可以通过对感测值进行解码生成多个触摸值(s160)。解码器216可以基于在s110中的编码中使用的矩阵(例如,该矩阵的逆矩阵)执行解码。
[0146]
然后,触摸控制器210的触摸处理器213可以基于触摸值识别触摸、触摸坐标和/或触摸强度(压力)。
[0147]
图13是根据示例实施例的触摸屏装置1000a的示图。
[0148]
参照图13,触摸屏装置1000a可包括触摸屏100a、触摸控制器210a和ddi 220。触摸屏100a可包括触摸面板110a和显示面板120,触摸面板110a可包括按照矩阵布置的感测电极se(即,点感测电极或者点传感器)。触摸面板110a可以由自电容方法进行感测。
[0149]
在示例实施例中,触摸控制器210a可包括接收电路212a和选择电路214a,接收电路212a可包括接收器rx,选择电路214a可包括多个选择器,例如,多路复用器mux。
[0150]
接收器rx可以作为发送器(例如,第一发送器tx1至第四发送器tx4)和接收器rx操作。感测电极se可以作为列单元连接至同一多路复用器mux,由多路复用器mux选择的感测电极se可以电连接至接收器rx。驱动信号可通过接收器rx被施加至由多路复用器mux选择的感测电极se,并且基于驱动信号生成的感测信号可被输出至接收器rx。
[0151]
触摸控制器210a还可包括编码器、解码器和触摸处理器。编码器、解码器和触摸处理器的操作可以与图2的编码器215、解码器216和触摸处理器213的操作相同。编码器可以通过基于特定矩阵(例如,哈达玛矩阵)对多个脉冲信号进行编码来生成多个驱动信号,解码器可以基于矩阵(即,该矩阵的逆矩阵)对多个感测信号进行解码。
[0152]
当触摸面板110a的布置成一行(例如,第一行r1)的感测电极se在驱动时段的第一子时段中被不平衡地驱动时,即,当具有相同的相位和频率的多个脉冲信号被施加至第一行r1的感测电极se时,具有与脉冲信号相同的频率和不同的相位的多个补偿信号可被施加
至多条源极线中的至少一些。因此,显示面板120的公共电极的电压可保持恒定,并且从第一行r1输出的感测信号可以不包括驱动信号造成的噪声。
[0153]
在示例实施例中,源极驱动器222中包括的第一源极放大器sa1至第n源极放大器san可以将补偿信号施加至第一源极线sl1至第n源极线sln。布置有第一源极线sl1至第n源极线sln的显示面板120上的区域可以与触摸面板110a的第一行r1的区域竖直地重叠。然而,示例实施例不限于此,补偿信号可被施加至布置在显示面板120中的源极线sl。
[0154]
图14和图15是根据示例实施例的触摸屏驱动电路的示图。
[0155]
参照图14,驱动电路200可包括触摸控制器210和ddi 220。在示例实施例中,触摸控制器210和ddi 220可以实施为分离的半导体芯片。在示例实施例中,触摸控制器210或者ddi 220中的至少一个可以通过多个半导体芯片来实施。
[0156]
触摸控制器210和ddi 220可以在主机300的控制下操作,ddi220可以从主机300接收图像数据idt,并且显示面板120可以被驱动,以根据图像数据idt在图1的显示面板120上显示图像。
[0157]
触摸控制器210可以扫描图1的触摸面板110,基于从触摸面板110接收的感测信号计算触摸坐标txy,并且将触摸坐标txy提供至主机300。
[0158]
参照图14,触摸控制器210可包括模拟前端(afe)、编码器、解码器、触摸处理器、时钟生成器和电压生成器。此外,触摸控制器210可包括用于与主机300和ddi 220通信的接口电路。作为非限制性示例,用于与主机300通信的接口电路可以由各种接口中的一种来实现,各种接口诸如通用串行总线(usb)接口、通用闪存(usf)接口、多媒体控制器(mmc)接口、嵌入式mmc(emmc)接口,外围组件快速互连(pcie)接口、高级技术附件(ata)接口、串行高级技术附件(sata)接口、并行高级技术附件(pata)接口、小型计算机系统接口(scsi)、串行附接scsi(sas)、增强型小型磁盘接口(esdi),集成驱动电子设备(ide)接口、高速串行接口等,用于与ddi 220通信的接口电路可以通过通用异步收发器(uart)接口、内部集成电路(i2c)接口、串行外围接口(spi)、移动工业处理器接口(mipi)、嵌入式显示端口(edp)接口中的一种方法来实现。
[0159]
afe可包括图2的驱动电路211和图2的接收电路212。afe还可包括选择电路,例如,图13的选择电路214a。
[0160]
时钟生成器可以生成在触摸控制器210中使用的时钟信号(例如,提供至驱动电路和接收电路的触摸时钟信号clk
t
),并且电压生成器可以生成在afe中使用的电压。
[0161]
由于上面已经参照图2描述了afe的编码器、解码器以及触摸处理器和组件(例如,驱动电路)的操作以及接收电路的操作,因此省略对其的重复描述。
[0162]
ddi 220可包括时钟生成器、时序控制器、电压生成器、伽马块、sram、栅极驱动器和源极驱动器。另外,显示驱动集成电路ddi可包括用于与主机130和触摸驱动电路tdi通信的集成电路。
[0163]
时钟生成器可以生成在ddi 220中使用的时钟信号(例如,提供至源极驱动器和栅极驱动器的时钟信号)。电压生成器可以生成在栅极驱动器和源极驱动器中使用的电压,伽马块可以生成与像素值可以具有的多个灰度相对应的多个灰度电压,并且将生成的灰度电压提供至源极驱动器。sram可以存储从主机300接收的图像数据idt。例如,sram可以以多个线为单位存储图像数据idt,或者以一帧为单位存储图像数据idt,并且以线为单位将图像
数据idt提供至源极驱动器。
[0164]
上面已经参照图2描述了栅极驱动器、源极驱动器和时序控制器的操作,因此省略对其的重复描述。
[0165]
ddi 220可以将指示显示时序的信号(例如,竖直同步信号vsync)提供至触摸控制器210。触摸控制器210可向驱动电路200提供触摸感测时序信息,例如,触摸时钟信号clk
t
。触摸控制器210和ddi220可基于同步信号(例如,竖直同步信号vsync)和触摸时钟信号clk
t
彼此同步地操作。例如,触摸控制器210可以响应于竖直同步信号vsync在显示面板120中无图像更新的时段中执行不平衡驱动,并且在ddi 220中,源极驱动器可以响应于触摸时钟信号clk
t
生成具有与多个驱动信号相同的频率和相反的相位的多个补偿信号,并且将补偿信号输出到源极线。
[0166]
参照图15,触摸屏驱动电路200a可包括用于驱动图1的触摸面板110的afe、编码器、解码器和触摸处理器,以及用于驱动图1的显示面板120的栅极驱动器、源极驱动器、sram、伽马块和时序控制器。此外,触摸屏驱动电路200a可包括用于生成其中使用的至少一个时钟信号的时钟信号生成器,以及用于生成多个电压的电压生成器。触摸屏驱动电路200a还可包括用于与主机300通信的集成电路。
[0167]
触摸屏驱动电路200a可以集成在单个半导体芯片上,触摸屏驱动电路200a可以被称为触摸显示驱动电路tddi。在示例实施例中,例如触摸处理器、编码器、解码器、sram、时序控制器和时钟信号发生器的数字电路可以集成在单个半导体芯片上,并且例如afe、栅极驱动器、源极驱动器、伽马块和电压生成器的模拟电路可以集成在一个或多个分离的半导体芯片上。
[0168]
虽然已经特别地示出和描述了示例实施例,但是应当理解,在不脱离权利要求的精神和范围的情况下,可以在形式和细节上进行各种改变。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。