1.本公开涉及一种用于可折叠踏板装置的操作稳定系统,更具体地,涉及一种用于可折叠踏板装置的操作稳定系统,该操作稳定系统能够利用两个独立的电池、两个独立的马达和两个独立的行程传感器来提高操作稳定性。
背景技术:
2.自动驾驶技术使车辆能够自动行驶到目的地而无需驾驶员手动操作方向盘、加速踏板、制动器等。最近,这种自动驾驶车辆的开发正在积极进行中。
3.通常在进行自动驾驶时,驾驶员可以从驾驶员手动驾驶车辆到目的地的手动驾驶模式和车辆自行驾驶到目的地而驾驶员无需驾驶车辆的自动驾驶模式中选择一种模式。
4.在自动驾驶模式下,驾驶员可以伸展腿部并舒适地休息。但是,当设置在驾驶员座椅前下方空间中的踏板(例如加速器踏板和制动踏板)暴露在室内时,可能会干扰驾驶员的休息。尤其是当踏板装置的垫被错误操作时,可能会强制停止自动驾驶,从而增加发生事故的风险。
5.因此,正在开发自动驾驶车辆的可折叠的踏板装置(例如加速器踏板装置和制动踏板装置),其可以在驾驶员手动驾驶车辆的手动驾驶模式下踏板装置的垫朝向驾驶员突出并暴露而使驾驶员能够操作踏板装置,并且在自动驾驶模式下踏板装置的垫被隐藏并且不朝向驾驶员侧突出,以免驾驶员操作,从而使驾驶员可以舒适地休息并且可以防止误操作。
6.此外,使踏板装置的垫突出以朝向驾驶员暴露的弹起操作和隐藏踏板装置的垫以不朝向驾驶员突出的隐藏操作通过使用电池电力的马达的操作来执行。在现有技术中,由于已经提供了包括电池和马达的单一系统,所以无法期望故障安全功能。因此,存在可折叠踏板装置的稳定性显著降低的问题。
7.前述内容仅旨在帮助理解本公开的背景,并不旨在表示本公开落入本领域技术人员已知的现有技术的范围内。
技术实现要素:
8.考虑到现有技术中存在的上述问题做出本公开,并且本公开旨在提出一种用于可折叠踏板装置的操作稳定系统,该操作稳定系统能够利用两个独立的电池、两个独立的马达和两个独立的行程传感器来提高操作稳定性,从而防止因故障而导致事故的风险。
9.为了实现上述目的,根据本公开的一方面,提供一种用于车辆的可折叠踏板装置的操作稳定系统,该操作稳定系统包括:第一电池和第二电池,设置在车辆中;第一车辆控制器和第二车辆控制器,分别从第一电池和第二电池接收电力,并分别发送操作信号;可折叠踏板控制器,设置在可折叠踏板装置中,并从第一车辆控制器和第二车辆控制器接收信号后发送控制信号;第一马达和第二马达,设置在可折叠踏板装置中并分别连接到第一电池和第二电池以从第一电池和第二电池接收电力,并且分别从可折叠踏板控制器接收控制
信号而操作;以及踏板驱动单元,设置在可折叠踏板装置中,从第一马达和第二马达接收动力而操作,并且在操作时驱动可折叠踏板装置的踏板垫以相对于踏板壳体枢转,使得踏板垫弹起或隐藏。
10.操作稳定系统可以进一步包括:第一行程传感器和第二行程传感器,设置在可折叠踏板装置中,并分别连接到第一电池和第二电池。
11.可折叠踏板控制器可以包括单个可折叠踏板控制器,单个可折叠控制器的控制区域被划分为第一控制器和第二控制器。第一控制器可以从第一车辆控制器接收信号后向第一马达发送操作控制信号,第二控制器从第二车辆控制器接收信号后向第二马达发送操作控制信号。
12.踏板驱动单元可以包括:第一齿轮,联接到第一马达;第二齿轮,联接到第二马达;公共齿轮,连接第一齿轮和第二齿轮;导螺杆,联接到公共齿轮的中心部分;支撑构件,螺纹联接到导螺杆以随着导螺杆的旋转而在导螺杆的长度方向上延伸和收缩;枢转构件,可枢转地联接到踏板壳体,并且当支撑构件延伸时被支撑构件支撑,当支撑构件收缩时从支撑构件的支撑被释放;以及连接连杆,将枢转构件和踏板垫彼此连接。
13.当支撑构件延伸并支撑枢转构件时,踏板垫可以枢转以从踏板壳体中突出,从而变为弹起状态。当支撑构件收缩并从支撑枢转构件的状态被释放时,踏板垫可以枢转以插入踏板壳体,从而变为隐藏状态。
14.当在自动驾驶情况下产生手动驾驶模式信号时,第一车辆控制器可以从第一电池接收电力后向可折叠踏板控制器的第一控制器发送操作信号,第二车辆控制器从第二电池接收电力后向可折叠踏板控制器的第二控制器发送操作信号。可折叠踏板控制器的第一控制器可以将操作控制信号发送到第一马达,可折叠踏板控制器的第二控制器将操作控制信号发送到第二马达。可折叠踏板装置的踏板垫可以根据第一马达和第二马达是否操作而变为弹起状态或保持隐藏状态。
15.可折叠踏板控制器的第一控制器和第二控制器可以分别判断第一马达和第二马达是否操作。当第一马达和第二马达同时操作时,第一马达和第二马达可以在可折叠踏板控制器的第一控制器和第二控制器的控制下分别分担踏板驱动单元操作所需的50%的扭矩来操作。响应于第一马达和第二马达同时操作,可折叠踏板装置的踏板垫可以变为弹起状态。
16.可折叠踏板控制器的第一控制器和第二控制器可以分别判断第一马达和第二马达是否操作。当第一马达和第二马达中的一个马达操作时,可以在可折叠踏板控制器的控制下向操作的马达施加扭矩的100%,可折叠踏板装置的踏板垫可以变为弹起状态。
17.当第一马达和第二马达中的一个马达操作时,车辆的警告系统可以在第一车辆控制器和第二车辆控制器的控制下操作。
18.可折叠踏板控制器的第一控制器和第二控制器可以分别判断第一马达和第二马达是否操作。当第一马达和第二马达均不操作时,在可折叠踏板控制器的控制下,踏板垫的弹起操作所需的控制逻辑可以结束,车辆的警告系统可以在第一车辆控制器和第二车辆控制器的控制下操作,并且车辆可以保持自动驾驶模式。
19.在可折叠踏板装置的踏板垫变为弹起状态后,当踏板垫通过驾驶员的操作进行枢转时,踏板垫可以根据第一行程传感器和第二行程传感器的输出状态而保持弹起状态或变
为隐藏状态。
20.可折叠踏板控制器的第一控制器和第二控制器可以判断第一行程传感器和第二行程传感器的输出状态。当第一行程传感器的输出值和第二行程传感器的输出值相同时,踏板垫可以在可折叠踏板控制器的第一控制器和第二控制器的控制下保持弹起状态,并且车辆可以以手动驾驶模式正常行驶。当第一行程传感器的输出值和第二行程传感器的输出值不同时,踏板垫可以在可折叠踏板控制器的第一控制器和第二控制器的控制下变为隐藏状态,并且车辆可以以自动驾驶模式行驶。
21.根据本公开的另一方面,提供一种用于车辆的可折叠踏板装置的操作稳定系统,该操作稳定系统包括:第一电池和第二电池,设置在车辆中;车辆控制器,包括从第一电池接收电力并发送操作信号的第一控制器和从第二电池接收电力并发送操作信号的第二控制器;可折叠踏板控制器,设置在可折叠踏板装置中,并包括从车辆控制器的第一控制器接收信号后发送控制信号的第一控制器和从车辆控制器的第二控制器接收信号后发送控制信号的第二控制器;第一马达和第二马达,设置在可折叠踏板装置中,并分别连接到第一电池和第二电池以从第一电池和第二电池接收电力,并且分别从可折叠踏板控制器接收控制信号而操作;踏板驱动单元,设置在可折叠踏板装置中,从第一马达和第二马达接收动力而操作,并且在操作时驱动可折叠踏板装置的踏板垫以相对于踏板壳体枢转,使得踏板垫弹起或隐藏;以及第一行程传感器和第二行程传感器,设置在可折叠踏板装置中,并分别连接到第一电池和第二电池。
22.踏板驱动单元可以包括:第一齿轮,联接到第一马达;第二齿轮,联接到第二马达;公共齿轮,连接第一齿轮和第二齿轮;导螺杆,联接到公共齿轮的中心部分;支撑构件,螺纹联接到导螺杆以随着导螺杆的旋转而在导螺杆的长度方向上延伸和收缩;枢转构件,可枢转地联接到踏板壳体,并且当支撑构件延伸时被支撑构件支撑,当支撑构件收缩时从支撑构件的支撑被释放;以及连接连杆,将枢转构件和踏板垫彼此连接。
23.当在自动驾驶情况下产生手动驾驶模式信号时,车辆控制器的第一控制器可以从第一电池接收电力后向可折叠踏板控制器的第一控制器发送操作信号,而车辆控制器的第二控制器从第二电池接收电力后向可折叠踏板控制器的第二控制器发送操作信号。可折叠踏板控制器的第一控制器可以将操作控制信号发送到第一马达,可折叠踏板控制器的第二控制器可以将操作控制信号发送到第二马达。可折叠踏板装置的踏板垫根据第一马达和第二马达是否操作而变为弹起状态或保持隐藏状态。
24.可折叠踏板控制器的第一控制器和第二控制器可以分别判断第一马达和第二马达是否操作。当第一马达和第二马达同时操作时,第一马达和第二马达可以在可折叠踏板控制器的第一控制器和第二控制器的控制下分别分担踏板驱动单元操作所需的50%的扭矩来操作。响应于第一马达和第二马达同时操作,可折叠踏板装置的踏板垫可以变为弹起状态。
25.可折叠踏板控制器的第一控制器和第二控制器可以分别判断第一马达和第二马达是否操作。当第一马达和第二马达中的一个马达操作时,可以在可折叠踏板控制器的控制下向操作的马达施加扭矩的100%,并且可折叠踏板装置的踏板垫可以变为弹起状态。
26.可折叠踏板控制器的第一控制器和第二控制器可以分别判断第一马达和第二马达是否操作。当第一马达和第二马达均不操作时,在可折叠踏板控制器的控制下,踏板垫的
弹起操作所需的控制逻辑可以结束,并且车辆可以保持自动驾驶模式。
27.在可折叠踏板装置的踏板垫变为弹起状态后,当踏板垫通过驾驶员的操作进行枢转时,踏板垫可以根据第一行程传感器和第二行程传感器的输出状态保持弹起状态或变为隐藏状态。
28.可折叠踏板控制器的第一控制器和第二控制器可以判断第一行程传感器和第二行程传感器的输出状态。当第一行程传感器的输出值和第二行程传感器的输出值相同时,踏板垫可以在可折叠踏板控制器的第一控制器和第二控制器的控制下保持弹起状态,并且车辆可以以手动驾驶模式正常行驶。当第一行程传感器的输出值和第二行程传感器的输出值不同时,踏板垫可以在可折叠踏板控制器的第一控制器和第二控制器的控制下变为隐藏状态,并且车辆可以以自动驾驶模式行驶。
29.根据本公开的用于可折叠踏板装置的操作稳定系统可以利用两个独立的电池、两个独立的马达和两个独立的行程传感器来提高操作稳定性,从而防止因故障而导致事故的风险。
附图说明
30.本公开的上述和其它目的、特征和其它优点将从以下结合附图的具体实施方式中得到更清楚的理解,其中:
31.图1是示出根据本公开的第一实施例的用于可折叠踏板装置的操作稳定系统的示意构造图;
32.图2是示出本公开的踏板操作单元的示图;
33.图3和图4分别是示出本公开的第一实施例的框图和流程图;
34.图5是示出根据本公开的第二实施例的用于可折叠踏板装置的操作稳定系统的示意构造图;以及
35.图6和图7分别是示出本公开的第二实施例的框图和流程图。
具体实施方式
36.本文所公开的本公开的实施例的具体结构和功能描述仅用于说明本公开的实施例。在不脱离本公开的思想和重要特征的情况下,本公开可以以许多不同的形式实施。因此,本公开的实施例仅用于说明的目的,不应被解释为对本公开的限制。
37.现在将详细参考本公开的各个实施例,这些实施例的具体示例在附图中示出并在下面描述,因为本公开的实施例可以以许多不同的形式进行各种修改。虽然将结合示例性实施例来描述本公开,但是应当理解的是,本描述不旨在将本公开限制于那些示例性实施例。相反,本公开旨在不仅涵盖示例性实施例,而且涵盖可以包括在由所附权利要求限定的本公开的思想和范围内的各种替代、修改、等同形式和其它实施例。
38.应当理解的是,尽管本文可以使用术语“第一”、“第二”等来描述各种元件,但是这些元件不应受这些术语的限制。这些术语仅用于区分一个元件与另一个元件。例如,在不脱离本公开的教导的情况下,下面讨论的第一元件可以被称为第二元件。类似地,第二元件也可以称为第一元件。
39.应当理解的是,当一个元件被称为“联接”或“连接”到另一个元件时,它可以直接
联接或连接到另一个元件,或者它们之间可以存在中间元件。相反,应当理解的是,当一个元件被称为“直接联接”或“直接连接”到另一个元件时,不存在中间元件。其它解释元件之间关系的表达方式,诸如“介于”、“直接介于”、“相邻”或“直接相邻”,应以同样的方式解释。
40.本文使用的术语仅用于描述特定实施例的目的,并不旨在进行限制。如本文所用,单数形式“一”、“一个”和“该”也旨在包括复数形式,除非上下文另有明确指示。将进一步理解的是,当在本说明书中使用时,术语“包括”、“包含”、“具有”等指定所述特征、整数、步骤、操作、元件、组件和/或它们的组合的存在,但不排除存在或添加一个或多个其它特征、整数、步骤、操作、元件、组件和/或它们的组合。
41.除非另有定义,否则本文使用的包括技术和科学术语的所有术语具有与本公开所属领域的普通技术人员通常理解的含义相同的含义。还应当理解的是,诸如在通用词典中定义的那些术语应当被解释为具有与其在相关领域和本公开的上下文中的含义一致的含义,并且将不被解释为理想化地或过于正式的意义,除非本文明确定义。
42.根据本公开的示例性实施例的控制器可以利用被配置为存储关于用于控制车辆的各个组件的操作的算法的数据或用于再现算法的软件指令的非易失性存储器(未示出)和被配置为利用存储在存储器中的数据执行以下操作的处理器(未示出)来实现。存储器和处理器可以分别实现为单独的芯片。可选地,存储器和处理器可以实现为单个集成芯片。处理器可以是一个或多个处理器。
43.在下文中,将参照图1至图4详细描述根据本公开的第一示例性实施例的用于可折叠踏板装置的操作稳定系统。
44.在自动驾驶车辆中,驾驶员可以从驾驶员手动驾驶车辆的手动驾驶模式和驾驶员不手动驾驶车辆而车辆自行驾驶到目的地的自动驾驶模式中选择一种模式。
45.也就是说,自动驾驶车辆的驾驶模式可以响应于诸如驾驶模式开关10的操作而改变。驾驶模式开关10可以包括自动驾驶模式开关11和手动驾驶模式开关12。
46.驾驶模式开关10连接到自动驾驶车辆中设置的第一电池21和第二电池22。第一电池21和第二电池22分别连接到设置在自动驾驶车辆中的第一车辆控制器31和第二车辆控制器32。
47.第一车辆控制器31和第二车辆控制器32分别从第一电池21和第二电池22接收电力后发送操作信号。
48.第一车辆控制器31和第二车辆控制器32的操作信号被传送到可折叠踏板装置。
49.可折叠踏板装置可以是可折叠的加速器踏板装置或可折叠的制动踏板装置。
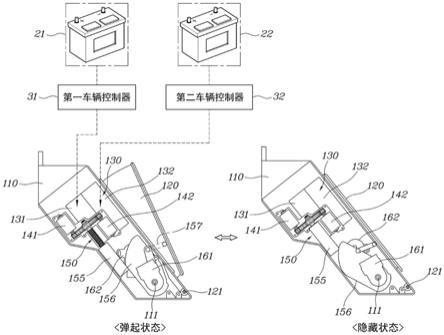
50.可折叠踏板装置可以包括:踏板壳体110,固定地设置在驾驶员座椅前下方空间中;踏板垫120,可枢转地联接到踏板壳体110并且由驾驶员的脚可操作;可折叠踏板控制器130,从第一车辆控制器31和第二车辆控制器32接收信号后发送控制信号;第一马达141及第二马达142,分别连接到第一电池21和第二电池22以从第一电池21和第二电池22接收电力,并且分别从可折叠踏板控制器130接收控制信号而操作;踏板驱动单元150,从第一马达141和第二马达142接收动力而操作,并且在操作时驱动踏板垫120相对于踏板壳体110枢转,使得踏板垫120弹起或隐藏;以及第一行程传感器161和第二行程传感器162,分别连接到第一电池21和第二电池22。
51.踏板壳体110具有中空箱的形状,可折叠踏板控制器130、第一马达141和第二马达
142、踏板驱动单元150等设置在踏板壳体110的内部空间内。
52.踏板垫120可以是风琴式垫,其底端通过铰链销121可枢转地联接到踏板壳体110,其顶端绕底端上的铰链销121在前后方向上可枢转。
53.可折叠踏板控制器130可以是单个控制器,其控制区域被划分为第一控制器131和第二控制器132。
54.第一控制器131接收来自第一车辆控制器31的信号后向第一马达141发送操作控制信号。第二控制器132接收来自第二车辆控制器32的信号后向第二马达142发送操作控制信号。
55.第一马达141和第二马达142中的每一个可以是旋转型马达。旋转型马达可以是步进马达。第一马达141和第二马达142可以被配置为分别从第一电池21和第二电池22接收电力。
56.踏板驱动单元150包括:第一齿轮151,联接到第一马达141;第二齿轮152,联接到第二马达142;公共齿轮153,连接第一齿轮151和第二齿轮152;导螺杆154,联接到公共齿轮153的中心部分;支撑构件155,螺纹联接到导螺杆154以随着导螺杆154的旋转而在导螺杆154的长度方向上延伸和收缩;枢转构件156,可枢转地联接到踏板壳体110,并且当支撑构件155延伸时被支撑构件155支撑,当支撑构件155收缩时从支撑构件155的支撑被释放;以及连接连杆157,将枢转构件156和踏板垫120彼此连接。
57.枢转构件156的一端可枢转地联接到踏板壳体110的固定轴111。枢转构件156通过连接连杆157连接到踏板垫120。枢转构件156可以为迟滞模块(hysteresis module),当踏板垫120被驾驶员操作时能够产生迟滞现象。
58.踏板垫120可以响应于由支撑构件155的延伸和收缩引起的枢转构件156的枢转而在踏板垫120插入踏板壳体110中的隐藏状态和踏板垫120从踏板壳体110中突出的弹起状态之间变化。
59.也就是说,当第一齿轮151、第二齿轮152和公共齿轮153通过第一马达141和第二马达142的操作而旋转时,联接到公共齿轮153的导螺杆154旋转。随着导螺杆154的旋转,与导螺杆154螺纹联接的支撑构件155以被踏板壳体110引导的状态在导螺杆154的长度方向上延伸和收缩。
60.当支撑构件155延伸并插入踏板壳体110和枢转构件156之间时,延伸的支撑构件155处于支撑枢转构件156的状态,并且踏板垫120从踏板壳体110突出并处于弹起状态。从此时起,踏板垫120可由驾驶员操作(参见图1和图2中的弹起状态)。
61.当支撑构件155收缩并从支撑枢转构件156的状态被释放时,踏板垫120枢转到踏板壳体110中,从而变为隐藏状态。此时,驾驶员不能操作踏板垫120(参见图1和图2中的隐藏状态)。
62.复位弹簧被设置为其两端支撑在踏板壳体110和枢转构件156上。当支撑构件155收缩并从支撑枢转构件156的状态被释放时,枢转构件156通过复位弹簧的弹力在枢转构件156插入踏板壳体110中的方向上枢转。此时,通过连接连杆157连接到枢转构件156的踏板垫120也枢转并插入踏板壳体110中,从而变为隐藏状态。
63.第一行程传感器161和第二行程传感器162分别固定地联接到踏板壳体110的左右部分。第一行程传感器161和第二行程传感器162分别通过连杆连接到踏板垫120。当驾驶员
操作踏板垫120时,第一行程传感器161和第二行程传感器162用于检测踏板垫120的初始位置(即返回位置)。另外,第一行程传感器161和第二行程传感器162中的每一个可以执行加速器踏板传感器(aps)或制动踏板传感器(bps)的辅助功能。
64.将参照图4描述根据本公开的第一实施例的控制过程。
65.在步骤s1中,设置有可折叠踏板装置的自动驾驶车辆在自动驾驶模式的情况下通过手动驾驶模式开关12的操作产生指示手动驾驶模式的信号时,在步骤s2中,第一车辆控制器31从第一电池21接收电力后向可折叠踏板控制器130的第一控制器131发送操作信号,第二车辆控制器32从第二电池22接收电力后向可折叠踏板控制器130的第二控制器132发送操作信号。
66.接着,在步骤s3中,可折叠踏板控制器130的第一控制器131将操作控制信号发送到第一马达141,可折叠踏板控制器130的第二控制器132将操作控制信号发送到第二马达142。在步骤s4中,可折叠踏板控制器130的第一控制器131和第二控制器132判断第一马达141和第二马达142是否同时操作。
67.当在步骤s4中的判断结果为第一马达141和第二马达142同时操作时,在步骤s5中,第一马达141和第二马达142在可折叠踏板控制器130的第一控制器131和第二控制器132控制下分别分担踏板驱动单元150操作所需的50%的扭矩来操作,并且支撑构件155响应于第一马达141和第二马达142的同时操作而延伸并支撑枢转构件156,从而可折叠踏板装置的踏板垫120变为弹起状态。
68.当在步骤s4中的判断结果为第一马达141和第二马达142不同时操作时,在步骤s6中,可折叠踏板控制器130判断第一马达141和第二马达142是否都处于停止状态。
69.当在步骤s6中的判断结果为第一马达141和第二马达142中的一个马达操作时,在步骤s7中,在可折叠踏板控制器130的控制下向操作的马达施加100%的扭矩,并且此时,可折叠踏板装置的踏板垫120变为弹起状态。
70.步骤s7的情况是第一马达141和第二马达142中的一个马达损坏或发生故障的状态。在这种情况下,可以在第一车辆控制器31和第二车辆控制器32的控制下操作车辆的警告系统以警告驾驶员。
71.警告系统可以是警告灯、警告声音发生器、组合仪表(cluster)、音频视频导航(avn)设备等。警告系统产生的警告信号可以包括视觉警告信号、听觉警告信号和触觉警告信号中的至少一个。
72.相反,当在步骤s6中的判断结果为第一马达141和第二马达142均不操作时,在步骤s8中,在可折叠踏板控制器130的控制下,踏板垫120的弹起操作所需的控制逻辑结束。此时,在步骤s9中,车辆的警告系统操作,并且车辆保持自动驾驶模式。
73.在步骤s5中可折叠踏板装置的踏板垫120变为弹起状态后,在步骤s10中,当踏板垫120通过驾驶员的操作枢转时,可折叠踏板控制器130的第一控制器131和第二控制器132判断第一行程传感器161的输出值和第二行程传感器162的输出值是否相同。
74.当在步骤s10中的判断结果为第一行程传感器161的输出值与第二行程传感器162的输出值相同时,在步骤s11中,踏板垫120在可折叠踏板控制器130的第一控制器131和第二控制器132的控制下保持弹起状态,并且车辆以手动模式正常行驶。
75.相反,当在步骤s10中的判断结果为第一行程传感器161的输出值和第二行程传感
器162的输出值不同时,在步骤s12中,踏板垫120在可折叠踏板控制器130的第一控制器131和第二控制器132的控制下变为隐藏状态。此时,在步骤s13中,车辆的警告系统操作并且车辆以自动驾驶模式行驶。
76.将参照图5至图7描述根据本公开的第二实施例的用于可折叠踏板装置的操作稳定系统。
77.参照图5至图7的本公开的第二实施例的组件与以上参照图1至图4描述的第一实施例相比,除了设置单个车辆控制器并且单个车辆控制器的控制区域被划分为第一控制器和第二控制器之外,其余组件相同。相同的组件将由相同的附图标记表示。
78.也就是说,可以通过驾驶模式开关10的操作来改变自动驾驶车辆的驾驶模式。驾驶模式开关10可以包括自动驾驶模式开关11和手动驾驶模式开关12。
79.驾驶模式开关10连接到自动驾驶车辆中设置的第一电池21和第二电池22。第一电池21和第二电池22连接到设置在自动驾驶车辆中的车辆控制器50。
80.车辆控制器50可以是单个控制器,其控制区域被划分为第一控制器51和第二控制器52。
81.第一控制器51从第一电池21接收电力后发送操作信号,第二控制器52从第二电池22接收电力后发送操作信号。
82.车辆控制器50的第一控制器51和第二控制器52的控制信号被发送到可折叠踏板装置。
83.可折叠踏板装置可以是可折叠加速器踏板装置或可折叠制动踏板装置。可折叠踏板装置的构造与根据第一实施例的可折叠踏板装置的构造相同。
84.也就是说,可折叠踏板装置可以包括:踏板壳体110,固定地设置在驾驶员座椅前下方空间中;踏板垫120,可枢转地联接到踏板壳体110并且由驾驶员的脚可操作;可折叠踏板控制器130,从车辆控制器50接收信号后发送控制信号;第一马达141和第二马达142,分别连接到第一电池21和第二电池22以从第一电池21和第二电池22接收电力并且分别从可折叠踏板控制器130接收控制信号而操作;踏板驱动单元150,从第一马达141和第二马达142接收动力而操作,并且在操作时驱动踏板垫120相对于踏板壳体110枢转,使得踏板垫120弹起或隐藏;以及第一行程传感器161和第二行程传感器162,分别连接到第一电池21和第二电池22。
85.踏板壳体110具有中空箱的形状,可折叠踏板控制器130、第一马达141和第二马达142、踏板驱动单元150等设置在踏板壳体110的内部空间内。
86.踏板垫120可以是风琴式垫,其底端通过铰链销121可枢转地联接到踏板壳体110,其顶端绕底端上的铰链销121在前后方向上可枢转。
87.可折叠踏板控制器130可以是单个控制器,其控制区域被划分为第一控制器131和第二控制器132。
88.可折叠踏板控制器130的第一控制器131接收来自车辆控制器50的第一控制器51的信号并将操作控制信号发送到第一马达141。可折叠踏板控制器130的第二控制器132接收来自车辆控制器50的第二控制器52的信号后向第二马达142发送操作控制信号。
89.第一马达141和第二马达142中的每一个可以是旋转型马达。旋转型马达可以是步进马达。第一马达141和第二马达142可以被配置为分别从第一电池21和第二电池22接收电
力。
90.踏板驱动单元150包括:第一齿轮151,联接到第一马达141;第二齿轮152,联接到第二马达142;公共齿轮153,连接第一齿轮151和第二齿轮152;导螺杆154,联接到公共齿轮153的中心部分;支撑构件155,螺纹联接到导螺杆154以随着导螺杆154的旋转在导螺杆154的长度方向上延伸和收缩;枢转构件156,可枢转地联接到踏板壳体110,并且当支撑构件155延伸时被支撑构件155支撑,当支撑构件155收缩时从支撑构件155的支撑被释放;以及连接连杆157,将枢转构件156和踏板垫120彼此连接。
91.枢转构件156的一端可枢转地联接到踏板壳体110的固定轴111。枢转构件156通过连接连杆157连接到踏板垫120。枢转构件156可以为迟滞模块,当踏板垫120被驾驶员操作时能够产生迟滞现象。
92.踏板垫120可以响应于由支撑构件155的延伸和收缩引起的枢转构件156的枢转而在踏板垫120插入踏板壳体110中的隐藏状态和踏板垫120从踏板壳体110中突出的弹起状态之间变化。
93.也就是说,当第一齿轮151、第二齿轮152和公共齿轮153通过第一马达141和第二马达142的操作而旋转时,联接到公共齿轮153的导螺杆154旋转。随着导螺杆154的旋转,与导螺杆154螺纹联接的支撑构件155以被踏板壳体110引导的状态在导螺杆154的长度方向上延伸和收缩。
94.当支撑构件155延伸并插入踏板壳体110和枢转构件156之间时,延伸的支撑构件155处于支撑枢转构件156的状态,并且踏板垫120从踏板壳体110突出并处于弹起状态。从此时起,踏板垫120可由驾驶员操作(参见图5中的弹起状态)。
95.当支撑构件155收缩并从支撑枢转构件156的状态被释放时,踏板垫120枢转到踏板壳体110中,从而变为隐藏状态。此时,驾驶员不能操作踏板垫120(参见图1和图2中的隐藏状态)。
96.复位弹簧被设置为其两端支撑在踏板壳体110和枢转构件156上。当支撑构件155收缩并从支撑枢转构件156的状态被释放时,枢转构件156通过复位弹簧的弹力在枢转构件156插入踏板壳体110中的方向上枢转。此时,通过连接连杆157连接到枢转构件156的踏板垫120也枢转并插入踏板壳体110中,从而变为隐藏状态。
97.第一行程传感器161和第二行程传感器162分别固定地联接到踏板壳体110的左右部分。第一行程传感器161和第二行程传感器162分别通过连杆连接到踏板垫120。当驾驶员操作踏板垫120时,第一行程传感器161和第二行程传感器162用于检测踏板垫120的初始位置(即返回位置)。另外,第一行程传感器161和第二行程传感器162中的每一个可以执行aps或bps的辅助功能。
98.将参照图7描述根据本公开的第二实施例的控制过程。
99.在步骤s51中,设置有可折叠踏板装置的自动驾驶车辆在自动驾驶模式的情况下通过手动驾驶模式开关12的操作产生指示手动驾驶模式的信号时,在步骤s52中,车辆控制器50的第一控制器51从第一电池21接收电力后向可折叠踏板控制器130的第一控制器131发送操作信号,车辆控制器50的第二控制器52从第二电池22接收电力后向可折叠踏板控制器130的第二控制器132发送操作信号。
100.接着,在步骤s53中,可折叠踏板控制器130的第一控制器131将操作控制信号发送
到第一马达141,可折叠踏板控制器130的第二控制器132将操作控制信号发送到第二马达142。在步骤s54中,可折叠踏板控制器130的第一控制器131和第二控制器132判断第一马达141和第二马达142是否同时操作。
101.当在步骤s54中的判断结果为第一马达141和第二马达142同时操作时,在步骤s55中,第一马达141和第二马达142在可折叠踏板控制器130的第一控制器131和第二控制器132控制下分别分担踏板驱动单元150操作所需的50%的扭矩来操作,并且支撑构件155响应于第一马达141和第二马达142的同时操作而延伸并支撑枢转构件156,从而可折叠踏板装置的踏板垫120变为弹起状态。
102.当在步骤s54中的判断结果为第一马达141和第二马达142不同时操作时,在步骤s56中,可折叠踏板控制器130判断第一马达141和第二马达142是否都处于停止状态。
103.当在步骤s56中的判断结果为第一马达141和第二马达142中的一个马达操作时,在步骤s57中,在可折叠踏板控制器130的控制下向操作的马达施加100%的扭矩,并且此时,可折叠踏板装置的踏板垫120变为弹起状态。
104.步骤s57的情况是第一马达141和第二马达142中的一个马达损坏或发生故障的状态。在这种情况下,可以在第一车辆控制器31和第二车辆控制器32的控制下操作车辆的警告系统以警告驾驶员。
105.警告系统可以是警告灯、警告声音发生器、组合仪表、avn设备等。警告系统产生的警告信号可以包括视觉警告信号、听觉警告信号和触觉警告信号中的至少一个。
106.相反,当在步骤s56中的判断结果为第一马达141和第二马达142均不操作时,在步骤s58中,在可折叠踏板控制器130的控制下,踏板垫120的弹起操作所需的控制逻辑结束。此时,在步骤s59中,车辆的警告系统操作,并且车辆保持自动驾驶模式。
107.在步骤s55中可折叠踏板装置的踏板垫120变为弹起状态后,在步骤s60中,当踏板垫120通过驾驶员的操作而枢转时,可折叠踏板控制器130的第一控制器131和第二控制器132判断第一行程传感器161的输出值和第二行程传感器162的输出值是否相同。
108.当在步骤s60中的判断结果为第一行程传感器161的输出值与第二行程传感器162的输出值相同时,在步骤s61中,踏板垫120在可折叠踏板控制器130的第一控制器131和第二控制器132的控制下保持弹起状态,并且车辆以手动模式正常行驶。
109.相反,当在步骤s60中的判断结果为第一行程传感器161的输出值和第二行程传感器162的输出值不同时,在步骤s62中,踏板垫120在可折叠踏板控制器130的第一控制器131和第二控制器132的控制下变为隐藏状态。此时,在步骤s63中,车辆的警告系统操作并且车辆以自动驾驶模式行驶。
110.如上所述,根据本公开的用于可折叠踏板装置的操作稳定系统可以利用独立的第一电池21和第二电池22、独立的第一马达141和第二马达142以及两个独立的行程传感器161和162来显著提高操作稳定性。特别地,可折叠踏板装置具有能够执行故障保护功能的构造,从而可以防止由故障引起的事故风险。
111.尽管出于说明的目的描述了本公开的特定实施例,但是本领域技术人员将理解的是,在不脱离所附权利要求中公开的本公开的范围和思想的情况下,各种修改、添加和替换是可能的。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。