1.本发明属于光电技术应用领域,具体涉及一种连续与脉冲激光相结合的风电叶片冰雪清除方法及系统。
背景技术:
2.风力机叶片是风电机组关键部件之一,是机组中承受载荷最复杂且长期受到风、砂、雨蚀作用的主要做动部件,作为风力发电机捕获风能的“第一步”,叶片的运行可靠性直接影响机组的安全性、可靠性、经济性。具有开发潜力的风能资源主要集中分布在寒冷地区、东南沿海以及岛屿等,然而大量安装高山、草原、沙漠、戈壁滩、沿海滩涂或近海等风能资源丰富地区的风力机,在冬、春季的低温环境运行时,面临叶片积冰的问题。
3.风电叶片结冰会减小翼型升力、增加阻力,导致叶片转矩下降,影响风机发电效率。同时,由于覆冰的增加,致使叶片质量分布不平衡,产生不对称载荷,进而造成风电机组出力下降,引发机械故障甚至停机。再者,叶片运转过程中,当冰层粘附力下降时极易出现冰块脱落,在重力和离心力的作用下,碎冰会被抛出很远,对机组四周的人员设备等造成伤害。
4.据调研,当前行业内对于风力机叶片在冬、春季节的防除冰方法主要分为以下三个途径:基于叶片表面涂装疏水吸能涂层防冰、叶片内腔热鼓风加热除冰、叶片表层预埋电加热膜除冰。上述防、除冰方法在部分风电场的应用已取得了一定的效果,为叶片除冰技术路线积累了宝贵的经验。然而,由于这些防、除冰技术均处于初期应用验证阶段,不可避免地普遍存在着技改施工复杂、能耗大、除冰效能低、须在机组中增加额外的除冰组部件、调整叶片的生产工艺等问题,部分方法会使叶片受到雷击的风险大大增加,安全性能降低。
5.近年来,激光作为电力行业中一种新兴的冰雪清除工具与技术,以其方向性好、能量定向传输效率高、非接触式作用等优点,以热融效应为主的连续激光已在高压输电线路、瓷瓶串、绝缘子等关键设备上得到了广泛的实际应用。因此,基于目前激光除冰的技术基础与应用经验,结合风力发电设备覆冰的特点,通过对叶片覆冰(雪)类型的智能识别,探索以高能激光为基础的新型冰雪清除方法,进而解决风力机叶片的冰冻问题,日渐成为风电运维期除冰技术研究的一个热点,对于风力机冬春季节的安全有效运行具有重要的现实意义。
技术实现要素:
6.针对上述背景技术中提到的难点问题,本发明的目的在于提供一种连续与脉冲激光相结合的风电叶片冰雪清除方法及系统,用于降低易凝冻地区风电机组叶片因结冰而带来的发电量损失,对提升机组能效、风场经济效益具有关键性作用。
7.为了达到上述目的,本发明采用的技术方案是:
8.一种连续与脉冲激光相结合的风电叶片冰雪清除系统,包括:冰雪形态识别单元、激光发生单元、双激光控制单元及激光瞄准与扫描单元;
9.所述冰雪形态识别单元用于对对风力机叶片表面的冰雪附着部位进行定位、拍照与图像存储,于对冰雪形态进行判别;
10.所述激光发生单元包含连续激光发生器与脉冲激光发生器,其中连续激光发生器用于提供连续激光光束对叶片上湿雪附着或冰层部位进行照射;脉冲激光发生器用于提供瞬态周期性峰值的激光光束;
11.所述双激光控制单元通过接收所述冰雪形态识别单元输出的判别结果,决定激光发生单元中各激光器的启停状态;
12.所述激光瞄准与扫描单元用于通过度转动实现激光光束对覆冰层受体的瞄准与扫描动作。
13.作为本发明的进一步改进,所述冰雪形态识别单元包括高倍电子望远镜、望远镜支架平台和便携式计算机;所述高倍电子望远镜安装于可调节的望远镜支架平台上,高倍电子望远镜与便携式计算机脑电连接;所述便携式计算机具有除冰控制单元,除冰控制单元内的图像采集模块控制望远镜支架平台转动,调整望远镜对风力机叶片表面的冰雪附着部位进行定位、拍照与图像存储。
14.作为本发明的进一步改进,所述除冰控制单元具有图像识别模块用于根据采集到的图片导入至叶片结冰附雪图像数据库,采用机器学习方法对当前图片中的冰雪附着形态进行比对分析,判别结果分为:湿雪附着、冰/晶体覆盖和冰雪混合。
15.作为本发明的进一步改进,所述双激光控制单元包含启停控制元件、能谱控制元件;所述启停控制元件用于通过接收冰雪形态识别单元输出的判别结果,决定激光发生单元中各激光器的启停状态;
16.所述能谱控制元件与激光发生单元电连接,除冰控制单元中的能谱设置模块用于调整不同激光发生器的能量输出关键参数。
17.作为本发明的进一步改进,所述激光瞄准与扫描单元包含激光发生器转动机构、光路腔、光学反射镜、聚焦镜;所述光学反射镜和聚焦镜安装于光路腔中;光路腔安装在激光发生单元中两种激光发生器的出口位置;除冰控制单元中的光束瞄准模块,用于对激光发生器转动机构进行控制,通过转动实现激光光束对覆冰层受体的瞄准动作;
18.所述聚焦镜用于可根据叶片覆冰面积大小进行不用规格的选装,进而获得不同直径的作业光斑。
19.作为本发明的进一步改进,还包括散热单元,所述散热单元采用便携式空气冷系统,用于对激光发生单元进行温度控制;
20.还包括能量供应单元,所述能量供应单元从风力机塔筒底部的变电柜取电,为冰雪形态识别单元、激光发生单元、双激光控制单元、激光瞄准与扫描单元、散热单元提供电能;
21.还包括工程收纳箱;所述工程收纳箱用于装载所述单元至单元所涉及的各种集成设备以及连接线缆。
22.一种连续与脉冲激光相结合的风电叶片冰雪清除系统的清除方法,包括以下步骤:
23.通过运行便携式计算机内除冰控制单元中的图像采集模块调整支架平台的旋转与俯仰角度,控制高倍电子望远镜对风力机叶片表面的冰雪附着部位进行对焦、定位与拍
照采集;
24.将采集到的叶片覆冰/雪图片导入至除冰控制单元中的图像识别模块,基于叶片结冰覆盖雪图像库,采用机器学习分析比对的方法,对当前图片中冰雪附着形态的进行类别判断,并将判别结果输出至双激光控制单元;
25.激光发生单元的发出的各激光光束,通过光路腔内的光学反射镜和聚焦镜后,指向叶片方向,借助高倍电子望远镜与图像采集模块对光斑位置进行反馈后,运行除冰控制单元中的光束瞄准模块,对激光发生器转动机构进行控制,通过转动实现激光光束对覆冰层受体的瞄准动作;
26.根据叶片覆冰面积大小,对聚焦镜进行不用规格的选装,从而获得不同直径的作业光斑;运行除冰控制单元中的光束扫描模块,通过扫描路径程序对光学反射镜进行往复转动控制使得各激光光束在相应叶片覆冰区域的局部扫描除冰。
27.作为本发明的进一步改进,所述双激光控制单元中的启停控制元件通过接收冰雪形态识别单元输出的覆冰判别结果,决定激光发生单元中相应激光器的启停状态:
28.若叶片表面为湿雪附着状态,则仅开启连续激光发生器,脉冲激光发生器保持关闭;
29.若叶片表面为冰/晶体覆盖或冰雪混合状态,则同时开启连续激光发生器与脉冲激光发生器。
30.作为本发明的进一步改进,双激光控制单元中的能谱控制元件根据图像识别模块判别出的冰雪层覆盖厚度与长宽尺寸,通过除冰控制单元中的能谱设置模块,调整不同激光发生器的能量输出关键参数。
31.作为本发明的进一步改进,所述各激光光束在相应叶片覆冰区域的局部扫描,具体包括:
32.对于连续激光发生器发出的稳态连续激光光束,经过多个光学反射镜的光路适配后,使其从聚焦镜输出的光束对叶片的湿雪附着区域或薄冰层区域进行逐行、持续扫描照射,稳态的激光能量被冰层和叶片表面吸收后,使得冰雪的融化成液态或直接汽化;
33.对于脉冲激光发生器发出的瞬态周期性激光光束,经过多个光学反射镜的光路适配后,使其从聚焦镜输出的光束对叶片的厚冰层区域的关键离散点位进行照射,间歇性瞬态激光脉冲使得冰层和设备界面处的覆冰瞬态吸热汽化,使得冰层破碎并在重力作用下自行脱落。
34.与现有技术相比,本发明的有益效果是:
35.本发明风电叶片冰雪清除系统,通过人工智能的方法高效准确地识别风力机叶片表面冰雪附着的形态,根据冰雪附着类型的判别,采用最优适用性的激光照射方式,调整相应的激光特征参数,优化光束控制方法,将基于热融效应的连续激光与基于激波效应的脉冲激光进行有机结合,可同时对叶片上不同类型的冰雪附着位置进行清除;与现有采用单一连续激光光束形式的除冰方法相比,除冰效率显著提高。整个除冰作业过程为非物理接触式操作,即无需在风电机组中添加额外的设备,不会对风电机组本身的整体力学结构、机电系统组成造成安全影响;
36.进一步地,该除冰系统可根据风电场区野外作业的实地需求,基于移动便携式巡检的理念进行集成开发,适用于不同地形条下的风电机组,具有通用性好,可达性强、运输
灵活机动的优势;
37.进一步地,该除冰方法与叶片表面疏水涂层、表面接触式电加热、叶片内部空腔热鼓风等传统方法相比,避免了涂料层厚与加热元件植入对叶片气动外形的影响,同时可排除由于额外电路系统所引起的叶片雷击风险,在非结冰季节无需对其进行常规的维护与检修,降低了运维成本。
附图说明
38.在此描述的附图仅用于解释目的,而不意图以任何方式来限制本发明公开的范围。另外,图中的各部件的形状和比例尺寸等仅为示意性的,用于帮助对本发明的理解,并不是具体限定本发明各部件的形状和比例尺寸。本领域的技术人员在本发明的教导下,可以根据具体情况选择各种可能的形状和比例尺寸来实施本发明。在附图中:
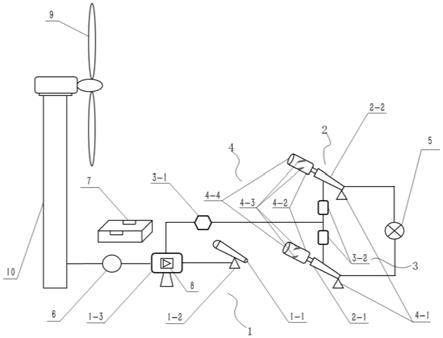
39.图1为本发明的整体结构示意图;
40.其中,1-1为高倍电子望远镜;1-2为望远镜支架平台;1-3为便携式计算机;2-1为连续激光发生器;2-2为脉冲激光发生器;3-1为启停控制元件;3-2为能谱控制元件;4-1为激光发生器转动机构;4-2为光路腔;4-3为光学反射镜;4-4为聚焦镜4-4;5为散热单元;6为能量供应单元;7为工程收纳箱;8为除冰控制单元(安装在便携式计算机1-3内);
41.图2为除冰控制单元的各组成模块;
42.图3为本发明优选实施例连续与脉冲激光相结合的风电叶片冰雪清除系统的工作原理图。
具体实施方式
43.为使本发明的目的、技术方案和优点更加清楚明白,下文中将结合附图对本发明的实施例进行详细说明。需要说明的是,在不冲突的情况下,本技术中的实施例及实施例中的特征可以相互任意组合。
44.在下面的描述中阐述了很多具体细节以便于充分理解本发明,但是,本发明还可以采用其他不同于在此描述的方式来实施,因此,本发明的保护范围并不受下面公开的具体实施例的限制。
45.如图1所示,本发明提供的一种连续与脉冲激光相结合的风电叶片冰雪清除系统,主要包括:冰雪形态识别单元1、激光发生单元2、双激光控制单元3、激光瞄准与扫描单元4、散热单元5、能量供应单元6、工程收纳箱7,以及除冰控制单元8。
46.所述冰雪形态识别单元1用于对风力机叶片9表面的冰雪附着部位进行定位、拍照与图像存储,于对冰雪形态进行判别;
47.所述激光发生单元2包含连续激光发生器2-1与脉冲激光发生器2-2,其中连续激光发生器2-1用于提供连续激光光束对叶片上湿雪附着或冰层部位进行照射;脉冲激光发生器2-2用于提供瞬态周期性峰值的激光光束;
48.所述双激光控制单元3通过接收所述冰雪形态识别单元1输出的判别结果,决定激光发生单元2中各激光器的启停状态。
49.所述激光瞄准与扫描单元4用于通过度转动实现激光光束对覆冰层受体的瞄准与扫描动作:
50.所述散热单元5采用便携式空气冷系统,用于对激光发生单元2进行温度控制;
51.所述能量供应单元6从风力机塔筒10底部的变电柜取电,为冰雪形态识别单元1、激光发生单元2、双激光控制单元3、激光瞄准与扫描单元4、散热单元5提供电能;
52.所述工程收纳箱7用于装载冰雪形态识别单元1、激光发生单元2、双激光控制单元3、激光瞄准与扫描单元4、散热单元5、能量供应单元6所涉及的各种集成设备以及连接线缆。
53.本发明通过高倍望远镜对风力机叶片结冰进行图像采集,结合人工智能的方法识别叶片表面冰雪附着的形态。根据冰雪附着状态,采用最优适用性的激光类型并调整相应的激光特征参数,在基于热融效应的连续激光与基于激波效应的脉冲激光的互相配合下,采用相应的光束扫描控制方法,可对叶片上不同类型的冰雪附着区域进行同步清除。与现有采用单一连续激光光束形式的除冰方法相比,可显著提高除冰效率。该除冰系统可根据风电场区野外作业的实地需求,基于移动便携式巡检的理念进行集成开发,具有可达性强、运输灵活机动的优势,适用于不同地形条的应用场景,为冬春季易凝冻地区的风电机组叶片除冰提供了一种新的方法。
54.为了使本发明的目的和技术方案更加清晰和便于理解。以下结合附图和实施例,对本发明进行进一步的详细说明。
55.所述冰雪形态识别单元1主要包含高倍电子望远镜1-1、望远镜支架平台1-2、便携式计算机1-3。高倍电子望远镜1-1安装于可上下、左右转动的望远镜支架平台1-2上,并与便携式计算机脑1-3相连。便携式计算机1-3内安装有除冰控制单元8,通过运行软件中的图像采集模块8a,控制支架平台的转动,调整望远镜的旋转与俯仰角度,对风力机叶片9表面的冰雪附着部位进行定位、拍照与图像存储。
56.便携式计算机1-3内除冰控制单元的图像识别模块8b,将采集到的图片导入至叶片结冰附雪图像数据库,采用人工智能(机器学习)的方法,对当前图片中的冰雪附着形态进行比对分析,判别结果分为三类:湿雪附着、冰(晶)体覆盖、冰雪混合。
57.所述激光发生单元2包含连续激光发生器2-1与脉冲激光发生器2-2,其中连续激光发生器2-1用于提供稳态连续激光光束,主要作用于对叶片上湿雪附着或冰层厚度较薄的部位进行照射,持续稳定的激光的能量被冰雪层和叶片表面吸收后,温度升高,通过热融效应使得冰雪的相态发生变化,最终融化成液态或直接汽化。脉冲激光发生器2-2用于提供瞬态周期性峰值的激光光束,冰层和设备界面的部分覆冰吸热急速汽化,急剧增多的水蒸汽对层冰产生应力波(激波作用),最终使得冰层破裂并自行脱落。
58.所述双激光控制单元3包含启停控制元件3-1、能谱控制元件3-2。双激光控制单元3整体与便携式计算机1-3相连。所述启停控制元件3-1通过接收冰雪形态识别单元1输出的判别结果,决定激光发生单元2中各激光器的启停状态:
59.(1)若叶片表面为绒雪附着状态,则仅开启连续激光发生器2-1,关闭脉冲激光发生器2-2;
60.(2)若叶片表面为冰(晶)体覆盖或冰雪混合状态,则同时开启连续激光发生器2-1与脉冲激光发生器2-2。
61.所述能谱控制元件3-2与激光发生单元2中的两种激光发生器进行配套。能谱控制元件3-2以无冰雪覆盖下叶片表面涂层与玻璃钢基体的激光照射能量损伤阈值为基础,根
据冰雪层覆盖厚度与长宽尺寸,通过便携式计算机1-3内除冰控制单元中的能谱设置模块8c,调整不同激光发生器的能量输出关键参数,包括:连续激光发生器的稳态功率密度、稳态工作时间的上限值;脉冲激光发生器的瞬态峰值功率密度、脉冲宽度、照射频率等关键参数的阈值范围,确保在叶片表面和基体不被激光灼伤的前提下进行有效的除冰作业。
62.所述激光瞄准与扫描单元4包含激光发生器转动机构4-1、光路腔4-2、光学反射镜4-3、聚焦镜4-4。所述光学反射镜4-3(一对)和聚焦镜4-4安装于光路腔4-2中。光路腔4-2配套安装在激光发生单元2中两种激光发生器的出口位置。激光瞄准与扫描单元4与便携式计算机1-3相连。便携式计算机1-3内除冰控制单元中的光束瞄准模块8d,用于对激光发生器转动机构4-1进行控制,通过大角度转动实现激光光束对覆冰层受体的瞄准动作:
63.(1)将连续激光发生器2-1的激光光束调整并落于叶片覆雪或覆冰层较薄的区域;
64.(2)将脉冲激光发生器2-2的激光光束调整并落于叶片覆冰层较厚的区域,并可使上述激光光束沿叶片翼展与弦长方向进行大尺度移动。
65.所述光学反射镜4-3在除冰控制单元中光束扫描模块8e的控制下,通过小角度往复转动实现各激光光束在目标区域的局部扫描。
66.所述聚焦镜4-4用于可根据叶片覆冰面积大小进行不用规格的选装,进而获得不同直径的作业光斑。
67.所述散热单元5采用便携式空气冷系统,主要对激光发生单元2进行温度控制,避免设备过热。
68.所述能量供应单元6可从风力机塔筒10底部的变电柜取电,通过不同的电源适配器装置为上述冰雪形态识别单元1、激光发生单元2、双激光控制单元3、激光瞄准与扫描单元4、散热单元5提供相应电压与功率等级的电能。
69.所述工程收纳箱7用于装载所述单元1至单元6所涉及的各种集成设备以及连接线缆,内部配有减震海绵,便于激光除冰作业前后的运输与存放。
70.本发明风电叶片冰雪清除方法的工作原理如下:
71.如图3所示,当风电机组的数据采集与监视控制(supervisory control and data acquisition,scada)系统向风电场集控中心发出覆冰警告后,将载有全套装备的工程收纳箱7运输至目标风电机组位置,对各单元进行组装后,从风力机塔筒内变电柜取电,接通能量供应单元6为其余各单元进行供电。将散热单元5中的便携式空气冷系统与激光发生单元2进行连通,形成冷热气流循环,进而对连续激光发生器2-1与脉冲激光发生器2-2的进行温度控制,避免设备过热。
72.本发明第二个目的是提供一种连续与脉冲激光相结合的风电叶片冰雪清除方法,包括如下步骤:
73.首先,叶片覆冰(雪)种类识别环节:
74.将高倍电子望远镜1-1安装于支架平台1-2上,通过运行便携式计算机1-3内除冰控制单元中的图像采集模块8a调整支架平台1-2的旋转与俯仰角度,控制高倍电子望远镜1-1对风力机叶片9表面的冰雪附着部位进行对焦、定位与拍照采集;
75.将采集到的叶片覆冰(雪)图片导入至除冰控制单元中的图像识别模块8b,基于叶片结冰覆盖雪图像库,采用人工智能(机器学习)分析比对的方法,对当前图片中冰雪附着形态的进行类别(湿雪附着、冰晶体覆盖、冰雪混合)判断,并将判别结果输出至双激光控制
单元3。
76.其次,激光除冰(雪)参数设置环节:
77.双激光控制单元3中的启停控制元件3-1通过接收冰雪形态识别单元1输出的覆冰判别结果,决定激光发生单元2中相应激光器的启停状态:
78.1)若叶片表面为“湿雪附着”状态,则仅开启连续激光发生器2-1,脉冲激光发生器2-2保持关闭;
79.2)若叶片表面为“冰(晶)体覆盖”或“冰雪混合”状态,则同时开启连续激光发生器2-1与脉冲激光发生器2-2。
80.双激光控制单元3中的能谱控制元件3-2根据图像识别模块8b判别出的冰雪层覆盖厚度与长宽尺寸,通过除冰控制单元中的能谱设置模块8c,调整不同激光发生器的能量输出关键参数,主要包括:
81.1)连续激光发生器的稳态功率密度、稳态工作时间的上限值;
82.2)脉冲激光发生器的瞬态峰值功率密度、脉冲宽度、照射频率等关键参数的阈值范围。
83.确保在叶片表面和基体不被激光灼伤的前提下进行有效的除冰作业。
84.再者,激光光束瞄准环节:
85.激光发生单元2的发出的各激光光束,通过光路腔4-2内的光学反射镜4-3和聚焦镜4-4后,指向叶片方向,借助高倍电子望远镜1-1与图像采集模块8a对光斑位置进行反馈后,运行除冰控制单元中的光束瞄准模块8d,对激光发生器转动机构4-1进行控制,通过大角度转动实现激光光束对覆冰层受体的瞄准动作:
86.1)调整连续激光发生器2-1的激光光束,使其落于叶片覆雪或覆冰层较薄的区域;
87.2)调整脉冲激光发生器2-2的激光光束,使其落于叶片覆冰层较厚的区域;
88.同时,可使上述激光光束沿叶片9翼展与弦长方向进行大尺度移动。
89.最后,激光扫描作业环节:
90.根据叶片覆冰面积大小,对聚焦镜4-4进行不用规格的选装,从而获得不同直径的作业光斑。运行除冰控制单元中的光束扫描模块8e,通过扫描路径程序对光学反射镜4-3进行小角度往复转动控制,实现各激光光束在相应叶片覆冰区域的局部扫描:
91.1)对于连续激光发生器2-1发出的稳态连续激光光束,经过多个光学反射镜4-3的光路适配后,可使其从聚焦镜4-4输出的光束对叶片的湿雪附着区域或薄冰层区域进行逐行、持续扫描照射,稳态的激光能量被冰层和叶片表面吸收后,使得该扫描区域温度升高,通过热融效应使得冰雪的融化成液态或直接汽化;
92.2)对于脉冲激光发生器2-2发出的瞬态周期性激光光束,经过多个光学反射镜4-3的光路适配后,可使其从聚焦镜4-4输出的光束对叶片的厚冰层区域的关键离散点位进行照射,间歇性瞬态激光脉冲使得冰层和设备界面处的覆冰瞬态吸热汽化,急剧增多的水蒸汽对层冰产生应力波,其激波效应使得冰层破碎并在重力作用下自行脱落。
93.上述连续与脉冲形态的激光光束互相配合,可在叶片不同冰雪附着位置同步进行针对性的融雪除冰作业,有效地提高了除冰效率。
94.以上披露的所有文章和参考资料,包括专利申请和出版物,出于各种目的通过援引结合于此。描述组合的术语“基本由
…
构成”应该包括所确定的元件、成分、部件或步骤以
及实质上没有影响该组合的基本新颖特征的其他元件、成分、部件或步骤。使用术语“包含”或“包括”来描述这里的元件、成分、部件或步骤的组合也想到了基本由这些元件、成分、部件或步骤构成的实施方式。这里通过使用术语“可以”,旨在说明“可以”包括的所描述的任何属性都是可选的。
95.多个元件、成分、部件或步骤能够由单个集成元件、成分、部件或步骤来提供。另选地,单个集成元件、成分、部件或步骤可以被分成分离的多个元件、成分、部件或步骤。用来描述元件、成分、部件或步骤的公开“一”或“一个”并不说为了排除其他的元件、成分、部件或步骤。
96.应该理解,以上描述是为了进行图示说明而不是为了进行限制。通过阅读上述描述,在所提供的示例之外的许多实施例和许多应用对本领域技术人员来说都将是显而易见的。因此,本教导的范围不应该参照上述描述来确定,而是应该参照前述权利要求以及这些权利要求所拥有的等价物的全部范围来确定。出于全面之目的,所有文章和参考包括专利申请和公告的公开都通过参考结合在本文中。在前述权利要求中省略这里公开的主题的任何方面并不是为了放弃该主体内容,也不应该认为申请人没有将该主题考虑为所公开的发明主题的一部分。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。