一种基于时空petri网的工程体系工作流程建模方法
技术领域
1.本发明属于建模方法,具体涉及一种基于时空petri网的工程体系工作流程建模方法。
背景技术:
2.体系工程中流程设计具有非常重要的地位,流程是体系各成员系统之间涌现出总体能力的关键因素,体系通过流程设计将各成员系统耦合起来,协同完成单个系统所不能完成的任务。传统的系统工程中缺少流程设计方法指导。petri网是一种系统的既有数学分析又有图形描述的工具,适合对具有并发、互斥、冲突等特性的离散事件系统进行建模,天然符合流程设计的要求。
3.体系工程的工作流建模成员系统复杂、具有各种自动和人工的任务信号,在时间和空间、人员和资源配置上要求成员系统具有高度的统一性和协调性,存在着优先执行、顺序执行、并发执行、资源抢占、共享和释放、空间的实时占用、共享占用、移动占用、结束占用和空间释放等各种复杂情况。
4.目前的工作流建模多是面向生产过程的流程设计,以制造产品和流水线作业为主要研究内容,建模对象主要是在产品和资源,运行机制主要是资源敏感型的触发约束和行为,缺少对体系工程的复杂系统建模能力,缺少符合体系工程的复杂系统各种复杂情况的运行机制。
5.公开号为cn103593516b的专利《一种作战体系建模与仿真系统》采用体系结构建模模块建立符合dodaf规范的体系结构模型和规范,自动生成仿真想定,但是只能提供仿真数据和模拟运行,缺少对体系建模中复杂的工作流模型的建模和运行能力。公开号为cn107301128a的专利《基于petri网模型的系统仿真验证方法》将sysml模型转换为petri网模型,再对转换后的模型进行仿真,对petri网的安全性、活性和死锁等基本性质进行了验证算法说明。
6.文献《基于工作流的舰载机作战指挥引导》利用uml工具建立作战指挥引导的工作流模型,并使用petri网对该工作流模型进行了可达性、合理性、选择性等验证。文献《基于uml和petri网的防空反导系统建模》依据系统的作战流程从用例图、类图和活动图等方面对其进行了概念建模,并结合petri网支持评估验证的特点,实现了从uml模型到pet而网模型的映射、转换与基本验证。
7.到目前为止,还没有一种专门用于体系工程工作流的petri网建模的方法。已有的文献和专利缺少对体系工程工作流中复杂对象特性、时空特性和约束、任务的时空特性、符合体系结构工作流的运行机制的研究成果。要实现体系工程工作流的petri网建模,必须解决体系工程的工作流中几个方面问题:
8.1)各种对象、人员、任务信号(人工/自动)和各种物料资源的建模;
9.2)任务的优先级、任务触发约束包括任务触发信号、任务优先级、所需人员、所需对象及其状态、所需物料资源、任务执行后约束包括任务执行完毕后释放的对象及其状态、
人员、物料资源和空间;
10.3)工作流的初始时间,空间环境建模;
11.4)各种元素在时空环境下的建模和运行空间的变化;
12.5)给出符合上述建模要求的时空petri网的运行机制。
技术实现要素:
13.为了解决上述背景技术存在的技术问题,本发明旨在提供基于时空petri网的体系工程工作流建模方法,解决体系工程工作流中时间、空间环境、任务和各种对象、人员、任务信号(人工/自动)和各种物料资源的建模,并给出在时空环境下各种模型元素的运行机制。
14.本发明是这样实现的:一种基于时空petri网的工程体系工作流程建模方法,包括如下步骤:
15.(1)初始化体系工程工作流环境,包括初始时间,空间环境、和各种对象、人员、任务信号和各种物料资源;
16.(2)对任务节点的基本描述和触发约束与行为进行描述;
17.(3)建立时空petri网,给出基本运行规则。
18.如上所述的一种基于时空petri网的工程体系工作流程建模方法,其中,所述的步骤(2)包括下述内容,
19.基于任务建立petri网的基本节点,任务触发约束包括任务触发信号、任务优先级、所需人员、所需对象及其状态、所需物料资源、所需的触发初始空间、所需时间,任务执行时的占用空间随时间的变化函数和系统条件描述。
20.如上所述的一种基于时空petri网的工程体系工作流程建模方法,其中,所述的步骤(3)包括下述内容,
21.任务执行后约束包括任务执行完毕后释放的对象及其状态、人员、物料资源和空间;
22.以类c 语言来描述上述的任务执行前和执行后的petri网变迁约束;
23.以任务的执行为基本活动,体现了体系工程工作流中任务所需的时空资源以及对象、人员及其空间移动和物料资源的流动、消耗,并据此给出了时空petri网体系工程工作流模型的具体运行机制。
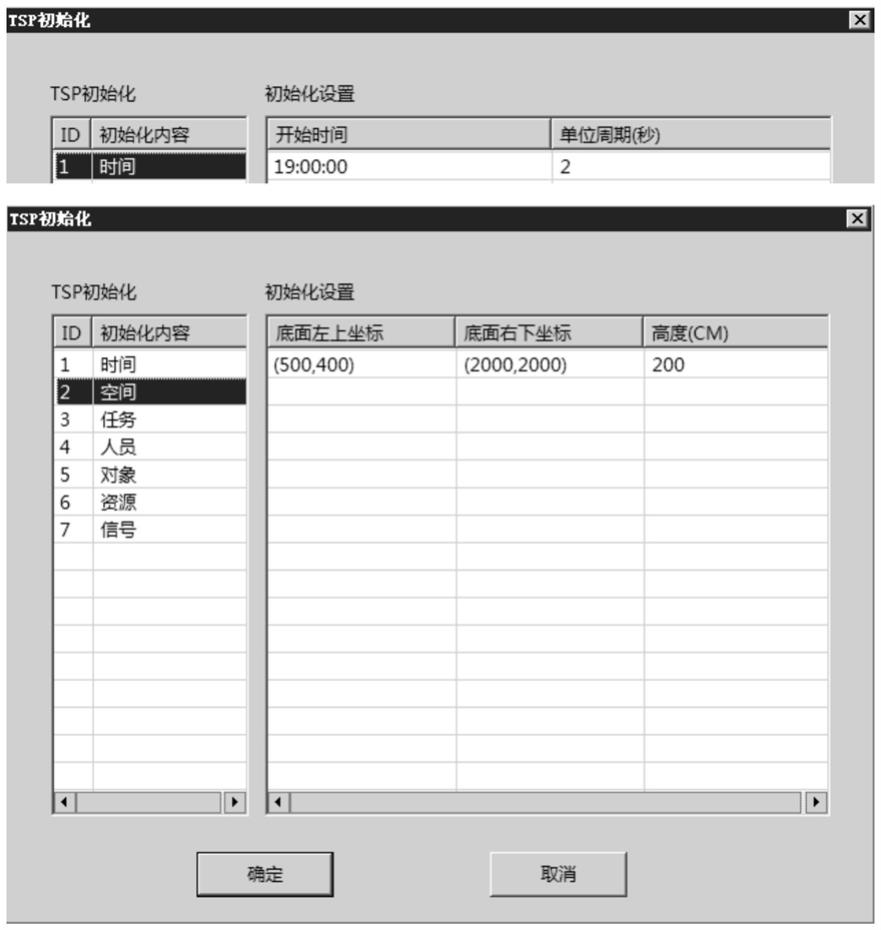
24.如上所述的一种基于时空petri网的工程体系工作流程建模方法,其中,所述的步骤(1)包括初始的时间要求、空间环境、初始的人员,对象,任务信号和各种物料资源,其表达式如下所示:
25.tsp
init
=<t,t
init
,s,p
init
,o
init
,r
init
,signal
init
>
26.其中,
27.t表示对工作流进行建模时,工作流的时间单位,也即工作流模型刷新一次任务状态和模型系统状态的周期时间;
28.t
init
表示工作流开始的时间;
29.s=<sb,h,se>表示对工作流进行建模时,工作流运行的三维空间界限,包括初始三维空间和结束三维空间,三维立体空间是由4个坐标点组成的平面<tl,tr,bl,br>和高
h构成,平面坐标分别为顶部左侧三维坐标,顶部右侧三维坐标,底部左侧三维坐标,底部右侧三维坐标。
30.表示系统目前在不同岗位(0-i)上配备的人员数量(0-j)
31.表示系统目前在不同类型(0-i)上配备的资源数量(0-j)
32.表示系统目前在不同类型(0-i)上配备的对象数量(0-j)
33.signal=<sig,p>,表示系统中存在的自动或者人工信号,来触发相关的任务,和任务触发的约束相关。sig表示信号,如果signal中p为空集,表示自动触发信号;否则signal为人工信号,表示来自单个或多个岗位的单个人员或多个人员p的单独触发信号或者联合触发信号。
34.如上所述的一种基于时空petri网的工程体系工作流程建模方法,其中,所述的步骤(2)中对任务节点进行基本描述、触发约束、触发行为和释放进行描述
35.任务节点的基本描述为
36.task=<pr,t1,t2,state,coordinate,s,trigger,post,re lease>,其中:
37.pr={1,n},表示优先级别为1~n,其中1为最高优先级,n为最低优先级
38.t1表示任务完成所需的时间;
39.t2表示任务已经执行的时间,初始值为0;
40.state表示任务状态,00表示未执行,01表示正在执行,10表示此次执行完成,11表示等待执行,已执行任务在执行过程中保持任务状态为01,在执行结束后更新任务状态为00并将t2重新设置为0,未执行的任务在系统更新后的任务状态保持00;
41.coordinate表示任务开始时的坐标起始点;
42.s=sfunc(t2,coordinate),sfunc函数表示任务节点根据初始坐标coordinate,在t2时刻,任务实时占用的空间;
43.任务节点的触发约束trigger=<p
trigger
,r
trigger
,s
trigger
,o
trigger
>,其中
44.p
trigger
表示任务触发所需人员,包括人员类型和数量;
45.r
trigger
表示任务触发所需物料资源,包括物料类型和数量;
46.s
trigger
表示任务触发所需的触发空间环境,表示从coordinate
init
坐标开始正方向的s
trigger
空间;
47.o
trigger
表示任务触发所需的不同对象(0-n)的数量(0-m);
48.任务的执行约束post=<p
post
,r
post
,s
post
,o
post
>,其中
49.p
post
表示任务执行需要占用的不同岗位(0-n)的人员数量(0-m);
50.r
post
表示任务执行需要消耗或占用的不同类型(0-n)的资源数量(0-m);
51.s
post
表示任务执行需要占用的介于工作流系统空间s之间的占用空间,必须满足s
post
∈s;如果没有增加占用空间,则s
post
=0;
52.o
post
表示任务执行需要占用的不同对象(0-n)的数量(0-m)。
53.任务执行完成后的释放行为re lease=<p
release
,r
release
,s
release
,o
release
>,其中
54.p
release
表示任务完成后释放的不同岗位(0-n)的人员数量(0-m);
55.r
release
表示任务完成后释放的不同资源(0-n)的资源数量(0-m);
56.s
release
表示任务完成后释放的介于工作流系统空间s之间的占用空间,必须满足s
release
∈s;
57.o
release
表示任务完成后释放的不同对象(0-n)的数量(0-m)。
58.如上所述的一种基于时空petri网的工程体系工作流程建模方法,其中,所述的步骤(3),给出基本运行规则
59.时空petri网tsp的形式化描述为:
60.tsp=<start,tsp
init
,task,trans,inflow,outflow,over>其中:
61.start:是一个虚拟的开始节点,它表示工作流运行的开始,可以有多个后续任务连接,表示并行开始的多优先级任务;但是不允许有任何任务指向start节点;
62.over:是一个虚拟的结束节点,它表示工作流运行的结束,可以有多个前续任务连接到over节点,但是over节点不允许指向任何任务节点。只有表示所有的前续任务都结束后,over节点才会有效,即表示整个工作流运行结束;
63.tsp
init
:时空petri网tsp的初始化,包括初始时间,空间环境、和各种对象、人员、任务信号(人工/自动)和各种物料资源的初始化;
64.task是工作流模型中的基本任务节点,task的触发约束和运行约束见3。
65.trans是工作流模型中的变迁节点,trans=<precondition,postaction>。trans结合inflow和outflow,根据系统的当前人员、对象、资源和空间配置,判断是否符合后续任务task的触发条件precondition,更新trans状态;trans结合outflow,根据任务优先级、系统的当前人员、对象、资源、空间配置和任务信号判断任务task是否可以执行postaction,如可以则执行postaction,并更新任务状态、系统的当前人员,对象、资源和空间配置。
66.如上所述的一种基于时空petri网的工程体系工作流程建模方法,其中,所述的步骤(3)具体包括:
67.inflow从task指向trans,可以允许多个task指向同一个trans,表示多个前续任务条件情况下,当前tsp是否可满足precondition,以触发trans的后续任务。preconditon采用类c 描述语言,是与inflow和系统当前环境相关的逻辑表达式;preconditon为真时,trans被触发,同时trans后续的task节点允许被执行。
68.outflow从trans指向task,可以允许同一个trans指向多个task,表示trans可触发多个后续任务;在满足precondition的情况下,根据优先级pr和系统当前环境来判断可执行的task,以执行trans后续任务,更新任务状态,更新系统环境。preaction采用类c 描述语言,是与outflow、优先级和系统当前环境相关的可执行表达式;postaction为真时,task才被真正执行,同时更新任务状态,更新系统环境,否则task状态为等待执行。
69.tsp基本的运行规则是:
70.(1)从start节点开始,按照系统的人员、对象、资源和空间配置,根据任务的优先级和触发的人员,物料资源和空间配置约束,触发初始的任务,开始工作流模型tsp的运行
71.(2)按照工作流的时间单位ti,以ti为周期,扫描所有在执行的task,根据当前所有
在执行任务task的执行时间来判断task是否执行完毕,更新任务状态。如果task的状态是01,则表示task正在执行,不能释放人员、物料资源和空间资源;如果task的状态是11,则表示task已执行完毕,更新系统的人员、对象、物料资源和空间配置,将执行完毕的task的任务状态置为10
72.(3)在完成单位时间的系统状态更新后,扫描所有trans。trans结合inflow和outflow,根据系统的当前人员、对象、资源和空间配置,判断是否符合后续任务task的触发条件precondition,更新trans状态,直至所有trans;trans结合outflow,根据任务优先级、系统的当前人员、对象、资源和空间配置判断任务task是否可以执行postaction,如可以则执行postaction,并更新任务状态、系统的当前人员,对象、资源和空间配置,直至所有task。
73.(4)按照ti为周期,按照(2)和(3)进行任务和系统更新,
74.(5)直至over节点的precondition被满足,表示over节点可以触发,即表示工作流时空petri网的一次完整的运行。
75.本发明的显著效果是:(1)本发明给出了体系工程工作流中各种对象、人员、各种物料资源的建模描述,解决了体系结构工作流模型元素的复杂性;
76.(2)本发明支持体系工程工作流的时间和空间建模,符合体系工程工作流中各元素在时空环境下的交互和运行;
77.(3)本发明支持任务优先级和任务触发约束、执行动作、任务执行时的占用空间随时间的变化函数和系统条件描述,符合体系工程工作流中任务运行的复杂性和时空动态性。
附图说明
78.图1是本发明中的tsp初始时间,空间环境建模图
79.图2是本发明中的tsp的对象、人员、各种物料资源建模图;
80.图3是本发明中的tsp的任务信号建模图
81.图4是本发明中的tsp的加油滑入任务设置图
82.图5是本发明中的tsp的飞机加油任务设置图
83.图6是本发明中的tsp的飞机加油滑出任务设置图
84.图7是本发明中飞机加油的初始时空petri网
85.图8是本发明中飞机加油的时空petri网运行图
86.图9是本发明中飞机加油的时空petri网运行结果图
具体实施方式
87.以下将结合附图,对本发明的技术方案进行详细说明。
88.本发明基于公开的一种基于时空petri网的体系工程工作流建模方法,开发了建模系统用于支持体系工程工作流建模。首先建立体系工程工作流的初始时间,空间环境、和各种对象、人员、任务信号(人工/自动)和各种物料资源;基于任务建立petri网的基本节点,包括任务优先级、任务完成所需时间、任务已经执行的时间、任务状态、任务开始时的坐标起始点、任务时间/空间函数、任务触发约束、任务执行;建立任务触发约束包括任务触发
信号、任务优先级、所需人员、所需对象及其状态、所需物料资源、所需的触发初始空间、所需时间,任务执行时的占用空间随时间的变化函数和系统条件描述;建立任务执行动作包括任务执行所消耗和占用的空间、各种对象、人员和各种物料资源;建立任务执行完毕后释放的对象、人员、物料资源和空间;以类c 语言来描述上述的任务执行前和执行后的约束和行为;以任务的执行为基本活动,体现了工作流中任务所需的时空资源以及对象、人员及其空间移动和物料资源的流动、消耗和释放,并据此给出了时空petri网体系工程工作流模型的具体运行机制。此种基于时空petri网-tsp的体系工程工作流建模方法综合考虑了工作流任务中的空间、时间、人员、对象、资源等要素的配置、约束、占用、消耗和释放,可以对具有时空要求的体系工程工作流任务环境进行有效的建模。
89.以飞机加油的工作流建模作为实例,来具体说明本发明的技术方案。
90.步骤1:对飞机加油的工作流的初始时间,空间环境进行建模,工作流初始时间为2019.11.17.19:00,空间环境的平面坐标和高度为(500,400),(2000,2000),200。如图1所示。
91.步骤2:对各种对象、人员、各种物料资源进行建模,其中对象包括飞机和油站,人员包括指挥员、飞行员和地勤,物料资料包括航空机油。如图2所示。
92.步骤3:对任务信号进行建模,包括允许加油滑入,允许飞机加油、允许飞机滑出,如图3所示
93.步骤4:对任务节点进行建模,包括加油滑入、飞机加油、飞机滑出:
94.加油滑入如图4所示。任务优先级为2,在接收到滑入信号后,飞机匀速滑入,位置空间随时间匀速变化,以下为加油滑入任务的具体设置。
95.任务名:加油滑入
96.优先级:2
97.开始时间:2019.11.27.19:00
98.持续时间:20分钟
99.执行时间:0
100.状态:0
101.开始坐标:(600,1000),(1000,1000),10
102.空间/时间函数:(x=x 10*t2),(y=y),(z=z)
103.触发条件:(signal.name==
‘
允许加油滑入’)and(signal.state==1)
104.执行行为:(signal.name=
‘
允许加油滑入’)and(signal.state=0)
105.释放行为:无
106.飞机加油任务如图5所示。任务优先级为2,在接收到加油信号后,如果油站存有油量大于500,则飞机开始加油,消耗航空机油200。以下为飞机加油任务的具体设置。
107.任务名:飞机加油
108.优先级:2
109.开始时间:2019.11.27.19:20
110.持续时间:20分钟
111.执行时间:0
112.状态:0
113.开始坐标:(800,1000),(1000,1000),10
114.空间/时间函数:(x=x),(y=y),(z=z)
115.触发条件:((signal.name=='飞机加油')and(signal.state==1))and((resource.name=='航空机油')and(resource.sum》500))"
116.执行行为:(signal.name=='飞机加油')and(signal.state==0))and((resource.name=='航空机油')and(resource.sum-=200)
117.释放行为:无
118.飞机滑出任务如图5所示。任务优先级为2,在接收到滑出信号后,飞机匀速滑入,位置空间随时间匀速变化。以下为飞机滑出任务的具体设置。
119.任务名:加油滑出
120.优先级:2
121.开始时间:2019.11.27.19:40
122.持续时间:10分钟
123.执行时间:0
124.状态:0
125.开始坐标:(800,1000),(1000,1000),10
126.空间/时间函数:(x=x 10*t2),(y=y),(z=z)
127.触发条件:(signal.name=='允许加油滑出')and(signal.state==1)
128.执行行为:(signal.name=='允许加油滑出')and(signal.state==1)
129.释放行为:无
130.步骤5:按照飞机加油的工作流逻辑,利用以上的建模元素及其约束,建立飞机加油工作流的初始时空petri网,开始信号为1,其他的信号和任务状态均为初始状态0,工作流进入等待运行的初始状态。如图7所示。
131.步骤6:运行飞机加油工作流的初始时空petri网,接收到允许飞机滑入信号为1,开始信号为1,其他的信号和任务均为初始状态0,工作流正在运行,结果如图8所示。
132.步骤7:飞机加油工作流的初始时空petri网运行结束,信号均进入重置状态0,任务均进入完成状态1,结束信号为1,工作流结束运行。结果如图8所示。
133.以上实施例仅为说明本发明的技术思想,不能以此限定本发明的保护范围,凡是按照本发明提出的技术思想,在技术方案基础上所做的任何改动,均落入本发明保护范围之内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。