技术特征:
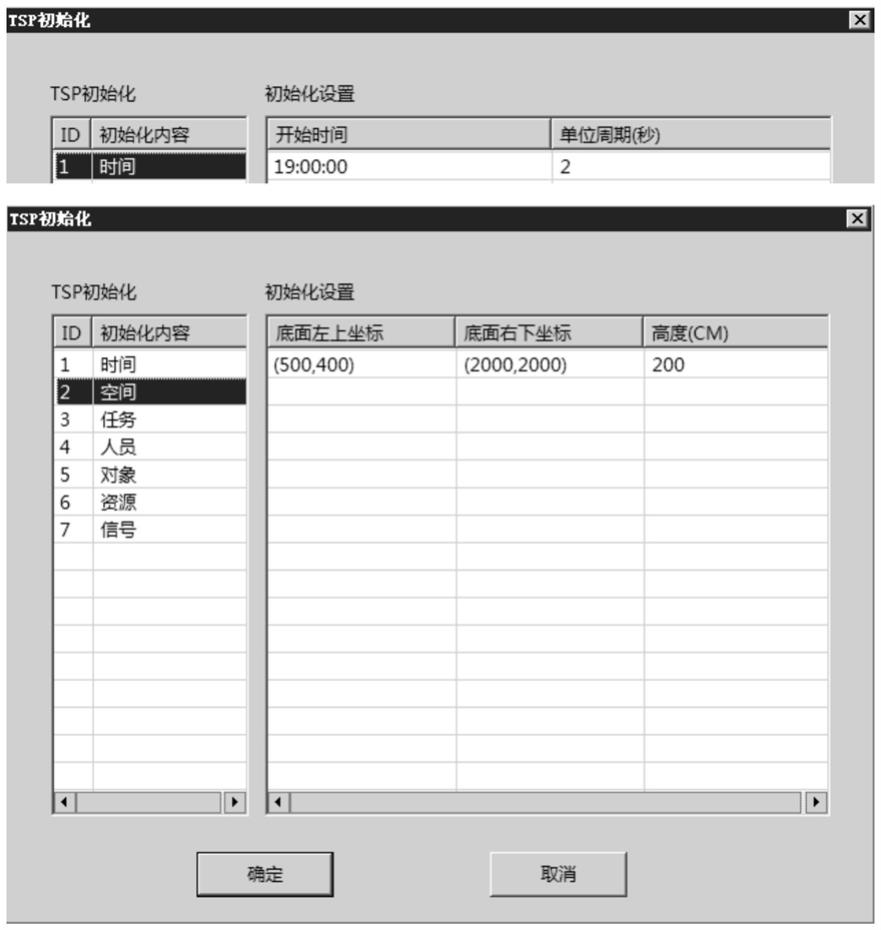
1.一种基于时空petri网的工程体系工作流程建模方法,其特征在于,包括如下步骤:(1)初始化体系工程工作流环境,包括初始时间,空间环境、和各种对象、人员、任务信号和各种物料资源;(2)对任务节点的基本描述和触发约束与行为进行描述;(3)建立时空petri网,给出基本运行规则。2.如权利要求1所述的一种基于时空petri网的工程体系工作流程建模方法,其特征在于:所述的步骤(2)包括下述内容,基于任务建立petri网的基本节点,任务触发约束包括任务触发信号、任务优先级、所需人员、所需对象及其状态、所需物料资源、所需的触发初始空间、所需时间,任务执行时的占用空间随时间的变化函数和系统条件描述。3.如权利要求1所述的一种基于时空petri网的工程体系工作流程建模方法,其特征在于:所述的步骤(3)包括下述内容,任务执行后约束包括任务执行完毕后释放的对象及其状态、人员、物料资源和空间;以类c 语言来描述上述的任务执行前和执行后的petri网变迁约束;以任务的执行为基本活动,体现了体系工程工作流中任务所需的时空资源以及对象、人员及其空间移动和物料资源的流动、消耗,并据此给出了时空petri网体系工程工作流模型的具体运行机制。4.如权利要求1所述的一种基于时空petri网的工程体系工作流程建模方法,其特征在于所述的步骤(1)包括初始的时间要求、空间环境、初始的人员,对象,任务信号和各种物料资源,其表达式如下所示:tsp
init
=<t,t
init
,s,p
init
,o
init
,r
init
,signal
init
>其中,t表示对工作流进行建模时,工作流的时间单位,也即工作流模型刷新一次任务状态和模型系统状态的周期时间;t
init
表示工作流开始的时间;s=<s
b
,h,s
e
>表示对工作流进行建模时,工作流运行的三维空间界限,包括初始三维空间和结束三维空间,三维立体空间是由4个坐标点组成的平面<tl,tr,bl,br>和高h构成,平面坐标分别为顶部左侧三维坐标,顶部右侧三维坐标,底部左侧三维坐标,底部右侧三维坐标。表示系统目前在不同岗位(0-i)上配备的人员数量(0-j)表示系统目前在不同类型(0-i)上配备的资源数量(0-j)表示系统目前在不同类型(0-i)上配备的对象数量(0-j)signal=<sig,p>,表示系统中存在的自动或者人工信号,来触发相关的任务,和任务触发的约束相关。sig表示信号,如果signal中p为空集,表示自动
触发信号;否则signal为人工信号,表示来自单个或多个岗位的单个人员或多个人员p的单独触发信号或者联合触发信号。5.如权利要求4所述的一种基于时空petri网的工程体系工作流程建模方法,其特征在于:所述的步骤(2)中对任务节点进行基本描述、触发约束、触发行为和释放进行描述任务节点的基本描述为task=<pr,t1,t2,state,coordinate,s,trigger,post,re lease>,其中:pr={1,n},表示优先级别为1~n,其中1为最高优先级,n为最低优先级t1表示任务完成所需的时间;t2表示任务已经执行的时间,初始值为0;state表示任务状态,00表示未执行,01表示正在执行,10表示此次执行完成,11表示等待执行,已执行任务在执行过程中保持任务状态为01,在执行结束后更新任务状态为00并将t2重新设置为0,未执行的任务在系统更新后的任务状态保持00;coordinate表示任务开始时的坐标起始点;s=sfunc(t2,coordinate),sfunc函数表示任务节点根据初始坐标coordinate,在t2时刻,任务实时占用的空间;任务节点的触发约束trigger=<p
trigger
,r
trigger
,s
trigger
,o
trigger
>,其中p
trigger
表示任务触发所需人员,包括人员类型和数量;r
trigger
表示任务触发所需物料资源,包括物料类型和数量;s
trigger
表示任务触发所需的触发空间环境,表示从coordinate
init
坐标开始正方向的s
trigger
空间;o
trigger
表示任务触发所需的不同对象(0-n)的数量(0-m);任务的执行约束post=<p
post
,r
post
,s
post
,o
post
>,其中p
post
表示任务执行需要占用的不同岗位(0-n)的人员数量(0-m);r
post
表示任务执行需要消耗或占用的不同类型(0-n)的资源数量(0-m);s
post
表示任务执行需要占用的介于工作流系统空间s之间的占用空间,必须满足s
post
∈s;如果没有增加占用空间,则s
post
=0;o
post
表示任务执行需要占用的不同对象(0-n)的数量(0-m)。任务执行完成后的释放行为re lease=<p
release
,r
release
,s
release
,o
release
>,其中p
release
表示任务完成后释放的不同岗位(0-n)的人员数量(0-m);r
release
表示任务完成后释放的不同资源(0-n)的资源数量(0-m);s
release
表示任务完成后释放的介于工作流系统空间s之间的占用空间,必须满足s
release
∈s;o
release
表示任务完成后释放的不同对象(0-n)的数量(0-m)。6.如权利要求5所述的一种基于时空petri网的工程体系工作流程建模方法,其特征在于:所述的步骤(3),给出基本运行规则时空petri网tsp的形式化描述为:tsp=<start,tsp
init
,task,trans,inflow,outflow,over>其中:start:是一个虚拟的开始节点,它表示工作流运行的开始,可以有多个后续任务连接,表示并行开始的多优先级任务;但是不允许有任何任务指向start节点;over:是一个虚拟的结束节点,它表示工作流运行的结束,可以有多个前续任务连接到
over节点,但是over节点不允许指向任何任务节点。只有表示所有的前续任务都结束后,over节点才会有效,即表示整个工作流运行结束;tsp
init
:时空petri网tsp的初始化,包括初始时间,空间环境、和各种对象、人员、任务信号(人工/自动)和各种物料资源的初始化;task是工作流模型中的基本任务节点,task的触发约束和运行约束见3。trans是工作流模型中的变迁节点,trans=<precondition,postaction>。trans结合inflow和outflow,根据系统的当前人员、对象、资源和空间配置,判断是否符合后续任务task的触发条件precondition,更新trans状态;trans结合outflow,根据任务优先级、系统的当前人员、对象、资源、空间配置和任务信号判断任务task是否可以执行postaction,如可以则执行postaction,并更新任务状态、系统的当前人员,对象、资源和空间配置。7.如权利要求6所述的一种基于时空petri网的工程体系工作流程建模方法,其特征在于:所述的步骤(3)具体包括:inflow从task指向trans,可以允许多个task指向同一个trans,表示多个前续任务条件情况下,当前tsp是否可满足precondition,以触发trans的后续任务。preconditon采用类c 描述语言,是与inflow和系统当前环境相关的逻辑表达式;preconditon为真时,trans被触发,同时trans后续的task节点允许被执行。outflow从trans指向task,可以允许同一个trans指向多个task,表示trans可触发多个后续任务;在满足precondition的情况下,根据优先级p
r
和系统当前环境来判断可执行的task,以执行trans后续任务,更新任务状态,更新系统环境。preaction采用类c 描述语言,是与outflow、优先级和系统当前环境相关的可执行表达式;postaction为真时,task才被真正执行,同时更新任务状态,更新系统环境,否则task状态为等待执行。tsp基本的运行规则是:(1)从start节点开始,按照系统的人员、对象、资源和空间配置,根据任务的优先级和触发的人员,物料资源和空间配置约束,触发初始的任务,开始工作流模型tsp的运行(2)按照工作流的时间单位t
i
,以t
i
为周期,扫描所有在执行的task,根据当前所有在执行任务task的执行时间来判断task是否执行完毕,更新任务状态。如果task的状态是01,则表示task正在执行,不能释放人员、物料资源和空间资源;如果task的状态是11,则表示task已执行完毕,更新系统的人员、对象、物料资源和空间配置,将执行完毕的task的任务状态置为10(3)在完成单位时间的系统状态更新后,扫描所有trans。trans结合inflow和outflow,根据系统的当前人员、对象、资源和空间配置,判断是否符合后续任务task的触发条件precondition,更新trans状态,直至所有trans;trans结合outflow,根据任务优先级、系统的当前人员、对象、资源和空间配置判断任务task是否可以执行postaction,如可以则执行postaction,并更新任务状态、系统的当前人员,对象、资源和空间配置,直至所有task。(4)按照t
i
为周期,按照(2)和(3)进行任务和系统更新,(5)直至over节点的precondition被满足,表示over节点可以触发,即表示工作流时空petri网的一次完整的运行。
技术总结
本发明属于建模方法,具体涉及一种基于时空Petri网的工程体系工作流程建模方法。它包括如下步骤:(1)初始化体系工程工作流环境,包括初始时间,空间环境、和各种对象、人员、任务信号和各种物料资源;(2)对任务节点的基本描述和触发约束与行为进行描述;(3)建立时空Petri网,给出基本运行规则。本发明的显著效果是:解决了体系结构工作流模型元素的复杂性;符合体系工程工作流中各元素在时空环境下的交互和运行;符合体系工程工作流中任务运行的复杂性和时空动态性。复杂性和时空动态性。复杂性和时空动态性。
技术研发人员:张宏军 黄百乔 张鹏 罗永亮 闫丹
受保护的技术使用者:中国船舶工业系统工程研究院
技术研发日:2020.11.20
技术公布日:2022/5/20
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。