1.本发明涉及涂胶技术领域,尤其涉及一种基于机器人的涂胶装置和涂胶方法。
背景技术:
2.现有的涂胶设备,喷头或待涂胶工件只能在一平面内移动,只适用于待涂胶工件具有一个待涂胶面,以及待涂胶面为平面的情况,对于复杂结构和外形的工件而言,难以进行涂胶。
技术实现要素:
3.本发明的目的是提供一种基于机器人的涂胶装置和涂胶方法,能适用于待涂胶工件表面为非平面的情况,能满足复杂结构和外形的工件的涂胶需求。
4.第一方面,本发明提供一种基于机器人的涂胶装置,包括工作台、机器人、喷头和光刻胶供应组件,所述机器人具有至少两个方向的自由度;所述喷头和待涂胶工件的其中一者连接在所述机器人上,另一者设置于所述工作台;所述光刻胶供应组件与所述喷头连接,所述机器人根据所述待涂胶工件的形状在至少一个方向上运动,带动所述喷头和所述待涂胶工件相对运动,以使所述喷头将所述光刻胶供应组件供应的光刻胶从多个角度或多个位置喷涂到所述待涂胶工件上。
5.一种实施方式中,所述涂胶装置还包括工装夹具,所述喷头或所述待涂胶工件通过所述工装夹具固定在所述机器人上。
6.一种实施方式中,所述工作台具有至少一个方向的自由度。
7.一种实施方式中,所述机器人带动所述喷头或所述待喷胶工件的移动路径包括曲线。
8.一种实施方式中,所述光刻胶供应组件包括储罐、动力件、管路和流量阀,所述管路连接所述储罐和所述喷头,所述动力件和所述流量阀设置在所述管路上,且所述流量阀设置在所述动力件远离所述储罐的一侧。
9.一种实施方式中,所述涂胶装置还包括外壳,所述外壳包括容纳腔,所述容纳腔为真空环境,所述工作台、所述机器人、所述喷头和所述光刻胶供应组件均容置于所述容纳腔。
10.第二方面,本发明提供一种基于机器人的涂胶方法,包括:
11.提供工作台、机器人、喷头和光刻胶供应组件,所述机器人具有至少两个方向的自由度,所述光刻胶供应组件与所述喷头连接;
12.将喷头和待涂胶工件的其中一者设置于所述机器人,另一者设置于所述工作台;
13.所述机器人根据所述待涂胶工件的形状在至少一个方向上运动,带动所述喷头和所述待涂胶工件相对运动,以使所述喷头将所述光刻胶供应组件供应的光刻胶从多个角度或多个位置喷涂到所述待涂胶工件上。
14.一种实施方式中,还包括:提供工装夹具,将所述喷头或所述待涂胶工件通过所述
工装夹具固定在所述机器人上。
15.一种实施方式中,所述工作台具有至少一个方向的自由度。
16.一种实施方式中,所述机器人带动所述喷头或所述待喷胶工件的移动路径为曲线。
17.本发明通过设置具有至少两个自由度的机器人,并将喷头和待涂胶工件中的一者设置于机器人,另一者设置于工作台,在涂胶时,机器人可以带动喷头和待涂胶工件中的一者相对另一者移动,以使得喷头将光刻胶供应组件供应的光刻胶从多个角度或多个位置喷涂到待涂胶工件上,能适用于待涂胶工件具有多个待涂胶面,以及表面为非平面的情况,使得具有复杂多变的结构和形状的待涂胶工件可以进行涂胶,满足复杂结构和外形的工件的涂胶需求。
附图说明
18.为了更清楚地说明本发明实施方式或现有技术中的技术方案,下面将对实施方式或现有技术描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本发明的一些实施方式,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。
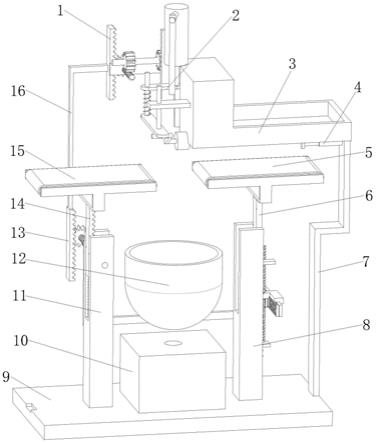
19.图1是一种实施例的基于机器人的涂胶装置的结构示意图。
20.附图标记说明:
21.10-工作台、11-支撑凸台;
22.21-机器人,22-工装夹具,23-喷头;
23.31-储罐,32-动力件,33-流量阀,34-管路;
24.40-待涂胶工件;
25.50-外壳,55-透明视窗。
具体实施方式
26.下面将结合本发明实施方式中的附图,对本发明实施方式中的技术方案进行清楚、完整地描述,显然,所描述的实施方式仅仅是本发明一部分实施方式,而不是全部的实施方式。基于本发明中的实施方式,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施方式,都属于本发明保护的范围。
27.请参考图1,本发明实施例提供一种基于机器人21的涂胶装置,包括工作台10、机器人21、喷头23和光刻胶供应组件。
28.工作台10作为结构支撑基础。可选的,可将机器人21安装在工作台10上;可选的,也可将机器人21安装在工作台10之外。工作台10上可设有支撑凸台11。可选的,支撑凸台11可相对工作台10活动;可选的,支撑凸台11也可相对工作台10固定。喷头23或待涂胶工件40可设于该支撑凸台11上。
29.机器人21具有至少两个方向的自由度;喷头23和待涂胶工件40的其中一者连接在机器人21上,另一者设置于工作台10;光刻胶供应组件与喷头23连接,机器人21根据待涂胶工件40的形状在至少一个方向上运动,带动喷头23和待涂胶工件40相对运动,以使喷头23将光刻胶供应组件供应的光刻胶从多个角度或多个位置喷涂到待涂胶工件40上。
30.机器人21为具有x轴、y轴、z轴的三个方向自由度中至少两个方向自由度的结构,其中,三个方向可为平移或转动。机器人21的结构可包括如处理器等控制机构、电机等驱动机构、机械臂等执行机构等,本发明对机器人21的具体结构不做具体限定。控制机构可根据程序控制驱动机构驱动执行机构移动或转动。
31.喷头23用于喷涂光刻胶,本实施例中,其结构具体不做限制。
32.光刻胶供应组件用于供应光刻胶,本实施例中,其结构具体不做限制。
33.待涂胶工件40可为任意需要进行涂胶的工件,包括但不限于金属、半导体、硅晶圆、玻璃、蓝宝石等。工件涂胶后,可进行光刻。具体而言,光刻工艺为在涂好光刻胶的工件表面进行曝光显影刻蚀。根据光刻胶的性质不同,可分为正性光刻胶和负性光刻胶,正性光刻胶被曝光部分在后续显影工艺中会被显影液去除,未被曝光部分被保留,而负性光刻胶则反过来,负性光刻胶被曝光部分被保留,而未被曝光部分在后续显影工艺中会被显影液去除。之后,再透过光刻胶中被去除的部分对工件进行刻蚀,可在工件上形成所需形状。最后,再将工件表面残留的光刻胶去除,以上即为光刻工艺的大体流程。显然,待涂胶工件40进行涂胶时,可涂正性光刻胶或负性光刻胶。
34.待涂胶工件40的结构和形状可以具有复杂结构和外形,具体而言,其结构可以是复杂多变的,而非如常规的平板状,可具有凹凸不平的结构,其形状也可以是复杂多变的,可为多个平面的组合,如多个互相呈夹角的平面的组合,也可为自由曲面等形状。涂胶时,由于机器人21的设置,可以在待涂胶工件40的多个区域进行涂胶,且机器人21可根据待涂胶工件40的形状进行运动,从而可以在待涂胶工件40上喷涂均匀厚度的光刻胶,即光刻胶的厚度在待涂胶工件40的各处是相同的。
35.传统方法中,喷头和待涂胶工件只能在一平面内相对运动,难以实现:1、喷头以多个角度或多个位置对待涂胶工件进行喷涂;2、一个待涂胶工件上有多个待涂胶面;3、待涂胶工件表面为非平面等的情况。
36.本发明实施例通过设置具有至少两个自由度的机器人21,并将喷头23和待涂胶工件40中的一者设置于机器人21,另一者设置于工作台10,在涂胶时,机器人21可以带动喷头23和待涂胶工件40中的一者相对另一者移动,以使得喷头23将光刻胶供应组件供应的光刻胶从多个角度或多个位置喷涂到待涂胶工件40上,能适用于待涂胶工件40具有多个待涂胶面,以及待涂胶工件40表面为非平面的情况,使得具有复杂多变的结构和形状的待涂胶工件40可以进行涂胶,满足复杂结构和外形的工件的涂胶需求。
37.一种实施例中,涂胶装置还包括工装夹具22,喷头23或待涂胶工件40通过工装夹具22固定在机器人21上。具体的,工装夹具22可为包括螺接固定结构、孔轴固定结构、卡接固定结构等任意可行的结构,本发明对工装夹具22的具体结构不做限制。工装夹具22一方面固定在机器人21的机械臂等执行机构上,另一方面,又用于固定喷头23或待涂胶工件40,从而实现喷头23或待涂胶工件40与机器人21的安装固定。通过工装夹具22将喷头23或待涂胶工件40固定至机器人21,能方便的实现喷头23或待涂胶工件40的安装固定。
38.可选的,工作台10上亦可设置有对应的工装夹具22(图中未示出),在机器人21上通过工装夹具22固定喷头23或待涂胶工件40的其中一者时,两者中的另一者也可通过工装夹具22安装固定到工作台10上,两种工装夹具22可相同也可不同。
39.可选的,工作台10上的工装夹具22可为真空吸附件,以待涂胶工件40设置在工作
台10上为例,待涂胶工件40通过真空吸附件吸附在工作台10上,通过吸附的方式能稳固的固定待涂胶工件40,且不引入复杂的安装结构,操作简单。
40.一种实施例中,工作台10具有至少一个方向的自由度。喷头23或待涂胶工件40中的一者固定在机器人21上,另一者固定在工作台10上,具体可设置在支撑凸台11上,工作台10具有x轴、y轴和z轴的至少一个方向的自由度,可为工作台10整体具有至少一个方向的自由度,也可为支撑凸台11具有至少一个方向的自由度。
41.可选的,当机器人21具有x轴、y轴、z轴中的两个方向的自由度时,工作台10可具有第三个方向的自由度,例如,机器人21具有x轴和y轴方向的自由度时,工作台10可具有z轴方向的自由度,如此,通过机器人21和工作台10的相互移动的配合,可实现三维空间上的任意位置的移动,从而可实现喷头23和待涂胶工件40在三维空间上的相对位置调整,从而可满足任意结构和形状的待涂胶工件40的涂胶需求。
42.可选的,当机器人21具有x轴、y轴、z轴的平移和转动的所有自由度时,工作台10的自由度可不做限制,如此,可根据需要灵活的调整机器人21和工作台10的自由度,以便加快对待涂胶工件40的涂胶速度。
43.一种实施例中,机器人21带动喷头23或待喷胶工件的移动路径包括曲线。具体的,待涂胶工件40的复杂结构和外形,具体体现在其表面的复杂性,例如为平面与曲面的组合,曲面与曲面的组合等,机器人21在带动喷头23或待涂胶工件40移动时,至少部分沿曲线移动,该曲线可为圆弧线、自由曲线等,以与待涂胶工件40的至少部分表面为圆弧面或自由曲面的情况时相适配。
44.一种实施例中,光刻胶供应组件包括储罐31、动力件32、管路34和流量阀33,管路34连接储罐31和喷头23,动力件32和流量阀33设置在管路34上,且流量阀33设置在动力件32远离储罐31的一侧。
45.储罐31用于储存光刻胶,其结构不做限制。
46.动力件32例如为液泵,用于提供光刻胶从储罐31到喷头23的流动的动力,其结构亦不做限制。
47.管路34供光刻胶流动,其连接储罐31和喷头23,在设置动力件32、流量阀33等位置可通过管接头连接,其上还可设置其他阀门、仪表等,具体不做限制。
48.流量阀33用于控制光刻胶的流量,满足在待涂胶工件40上均匀喷涂不同厚度的光刻胶的需求,其结构亦不做限制。
49.光刻胶供应流程为:涂胶装置启动,动力件32从储罐31吸取光刻胶,流量阀33控制管路34中光刻胶的流量,光刻胶到达喷头23处喷出。喷头23喷出的光刻胶可为雾化的颗粒,亦可为液体。
50.通过设置以上的光刻胶供应组件,通过简单的结构实现光刻胶的供应。
51.一种实施例中,涂胶装置还包括外壳50,外壳50包括容纳腔,容纳腔为真空环境,工作台10、机器人21、喷头23和光刻胶供应组件均容置于容纳腔。在真空环境中进行涂胶操作,能减小环境干扰,提高涂胶工件的涂胶质量。
52.其他实施例中,容纳腔内也可不设为真空环境。
53.其他实施例中,也可不设外壳50。
54.一种实施例中,外壳50上可设透明视窗55,可透过透明视窗55查看容纳腔内的机
器人21和工作台10的状况,便于随时监控生产情况。
55.基于相同的发明构思,请参考图1,本发明实施例还提供一种基于机器人21的涂胶方法,该涂胶方法包括:
56.提供工作台10、机器人21、喷头23和光刻胶供应组件,机器人21具有至少两个方向的自由度,光刻胶供应组件与喷头23连接;
57.将喷头23和待涂胶工件40的其中一者设置于机器人21,另一者设置于工作台10;
58.机器人21根据待涂胶工件40的形状在至少一个方向上运动,带动喷头23和待涂胶工件40相对运动,以使喷头23将光刻胶供应组件供应的光刻胶从多个角度或多个位置喷涂到待涂胶工件40上。
59.本实施例中的工作台10、机器人21、喷头23、光刻胶供应组件等结构的具体设置可参考前述说明即可,此处不再赘述。
60.本发明实施例通过设置具有至少两个自由度的机器人21,并将喷头23和待涂胶工件40中的一者设置于机器人21,另一者设置于工作台10,在涂胶时,机器人21可以带动喷头23和待涂胶工件40中的一者相对另一者移动,以使得喷头23将光刻胶供应组件供应的光刻胶从多个角度或多个位置喷涂到待涂胶工件40上,能适用于待涂胶工件40具有多个待涂胶面,以及表面为非平面的情况,使得具有复杂多变的结构和形状的待涂胶工件40可以进行涂胶,满足复杂结构和外形的工件的涂胶需求。
61.一种实施例中,该涂胶方法还包括:提供工装夹具22,将喷头23或待涂胶工件40通过工装夹具22固定在机器人21上。
62.一种实施例中,工作台10具有至少一个方向的自由度。
63.一种实施例中,机器人21带动喷头23或待喷胶工件的移动路径包括曲线。
64.以上所揭露的仅为本发明一种较佳实施例而已,当然不能以此来限定本发明之权利范围,本领域普通技术人员可以理解实现上述实施例的全部或部分流程,并依本发明权利要求所作的等同变化,仍属于发明所涵盖的范围。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。