技术特征:
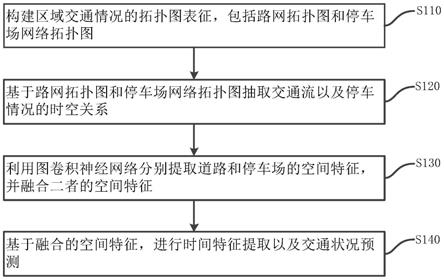
1.一种基于时空关系抽取的区域交通状况集成预测方法,包括以下步骤:针对目标区域,构建道路的路网拓扑图和停车场的停车场拓扑图,其中,对于路网拓扑图,将道路作为图节点,节点之间的连接规则遵循道路的自然连接规则,每条路上的平均车速信息作为节点的特征,对于停车场拓扑图中,将停车场作为节点,采用最短路径法作为节点的连接规则,将停车场车位占用数量作为节点特征;基于所述路网拓扑图和所述停车场拓扑图,利用构建的多任务模型架构获得路网中各条道路的平均车速预测结果以及停车场网络中各个停车场车位占用的预测结果,其中所述多任务模型架构包括时空抽取网络、异构图神经网络和时间序列模型。2.根据权利要求1所述的方法,其特征在于,所述时空抽取网络用于根据多个历史时刻的平均车速信息和停车场的车位占用数据提取道路节点和停车场节点的时空关系,得到所有节点的时空关系拓扑图;对于每个时刻,采用两个图卷积神经网络分别提取道路节点的空间特征和停车场节点的特征,进而通过异构图神经网络融合道路节点的空间特征矩阵和停车场节点的特征矩阵,获得对应时刻的融合特征;基于各时刻的融合特征,采用所述时间序列模型提取时间特征并输出后续时刻路网中各条道路的平均车速预测结果以及停车场网络中各个停车场车位占用的预测结果。3.根据权利要求2所述的方法,其特征在于,将所述路网拓扑图标记为g
r
=(v
r
,e
r
),将道路视为图节点,如果两条道路相交,则连接两个节点,v
r
={v1,v2,
…
,v
n
}表示所有节点的集合,n为节点数量,e
r
表示所有边的集合,各个节点之间的连接关系采用邻接矩阵a
r
表示,a
r
∈r
n
×
n
,将每条路上的平均车速信息作为节点的特征,每个节点的特征记为x
r
=[x1,x2,
…
,x
t
,
…
,x
t
],t是历史时间序列的长度,x
t
表示t时刻的节点特征,表示t时刻的所有节点特征,将所述停车场网络拓扑图标记为g
p
=(v
p
,e
p
),将停车场视为节点,如果两个停车场节点之间的最短道路距离小于设定阈值,则连接两个节点,v
p
={v1,v2,
…
,v
m
},m为停车场数量,邻接矩阵a
p
∈r
m
×
m
,将停车场车位占用数量作为节点特征,t为时间段内每个节点的特征,记为x
p
=[x1,x2,
…
,x
t
,
…
,x
t
],表示t时刻的所有节点特征,4.根据权利要求2所述的方法,其特征在于,所述时空抽取网络包括双向门控循环单元和注意力层,其中,所述注意力层对于所述双向门控循环单元多个隐藏状态赋予不同的权重。5.根据权利要求4所述的方法,其特征在于,所述双向门控循环单元的输出v由各个隐藏状态加权求和得到,表示为:u
t
=tanh(w
a1
h
t
)v=∑
t
α
t
h
t
其中,h
t
是t时刻的输出状态,w
a1
、w
a2
和α
t
分别是对应项的权重,所述时空关系抽取网络的最终输出表示为:
其中,w
v
表示权值,b
v
表示偏置。6.根据权利要求2所述的方法,其特征在于,所述两个图卷积神经网络根据以下步骤分别提取道路节点的空间特征和停车场节点的特征:对于两层的图卷积神经网络,模型统一表示为:x是特征矩阵,a是邻接矩阵,进而对进行归一化处理得到进行归一化处理得到为度矩阵,w0和w1是权重矩阵,σ(
·
)代表激活函数;基于该两层的图卷积神经网络分别提取的道路节点的空间特征矩阵和停车场节点的特征矩阵表示为:特征矩阵表示为:特征矩阵表示为:代表t时刻所有道路节点的高级特征表示,是t时刻所有停车场节点的高级特征表示,a
r
是路网拓扑图的邻接矩阵,a
p
是停车场网络拓扑图的邻接矩阵。7.根据权利要求6所述的方法,其特征在于,对于节点i与邻居节点融合后的空间特征表示为:表示为:为当前节点i的特征,j是指向i的邻居节点,为节点j的特征。e为j和i组成的边的集合,α
e
为边的权重,α
e
=a
rp
[j][i],为节点i融合到邻居节点特征后的特征,a
rp
是异构图神经网络中的带权有向邻接矩阵。8.根据权利要求1所述的方法,其特征在于,所述时间序列模型是门控循环单元。9.一种计算机可读存储介质,其上存储有计算机程序,其中,该程序被处理器执行时实现根据权利要求1至8中任一项所述方法的步骤。10.一种计算机设备,包括存储器和处理器,在所述存储器上存储有能够在处理器上运行的计算机程序,其特征在于,所述处理器执行所述程序时实现权利要求1至8中任一项所述的方法的步骤。
技术总结
本发明公开了一种基于时空关系抽取的区域交通状况集成预测方法。该方法包括:针对目标区域,构建道路的路网拓扑图和停车场的停车场拓扑图,对于路网拓扑图,道路作为图节点,节点之间的连接规则遵循道路的自然连接规则,每条路上的平均车速信息作为节点的特征,对于停车场拓扑图,停车场作为节点,采用最短路径作为节点的连接规则,停车场车位占用数量作为节点特征;基于路网拓扑图和停车场拓扑图,利用构建的多任务模型获得各条道路的平均车速预测结果以及各个停车场车位占用的预测结果,其中所述多任务模型架构包括时空抽取网络、异构图神经网络和时间序列模型。本发明能够实现交通流与停车状况的集成预测,提升了预测精度。提升了预测精度。提升了预测精度。
技术研发人员:于家傲 彭磊
受保护的技术使用者:中国科学院深圳先进技术研究院
技术研发日:2022.01.10
技术公布日:2022/5/20
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。