1.本发明涉及具有权利要求1的第一部分的特征的一种用于车辆转向的方法。本发明还涉及具有权利要求16的第一部分的特征的一种车辆转向系统布置、以及一种包括这种转向系统布置的车辆。
背景技术:
2.车辆的转向和前悬架通常被设计成:在通过动力转向(bcps,助力弯道动力转向(boost-curve power steering))进行放大或不通过动力转向进行放大的情况下,在驾驶员向方向盘施加手力(hand force)从而引起扭矩的前提下给出一定的反馈和转向效应。对于bcps而言,转向感觉纯粹是齿条力(rack force)的一小部分,具有其所有的扰动、摩擦等等。这严重地限制了车辆设计的自由度和车辆特性的优化。
3.悬架设计还将抵抗来自外力的不期望的转向效应,即不是由驾驶员引入的车轮转向角中的改变(以俯视图在车轮之间、与行进的前向方向相关的改变),并且同时提供来自外力的期望转向效应。这通常导致严重的折衷以及如上所提到的增加对悬架设计和整体车辆性能的限制。
4.即使可以调整悬架参数以最小化转向力,它们可能通常也不是足够低以允许在良好转向感觉的情况下舒适地驾驶。对动力辅助的需要通常随着前轴负载而升高。
5.围绕着现代车辆及其动力辅助转向的另一个话题是:如果丧失了辅助,转向可能就太困难了。为了克服这一点,将需要具有高转向齿条负载的车辆的动力转向是具有失效保护的(fail-safe),即,即使在故障期间也维持辅助,这将是非常昂贵的。
6.因此,悬架和动力转向系统的当前设计必须满足许多冲突的目标。针对设计具有良好反馈的良好转向系统的一个重要标准是:当车辆转动更困难——即横向加速时,提供增加的扭矩反馈和方向盘的自定心(self-centering)。做到这一点的手段是具有一定的地面处的主销后倾偏移(caster offset)值。地面处的主销后倾偏移是转向轴与车轮接触面(wheel contact patch)的纵向中心点之间的杠杆。地面处的主销后倾偏移的增加将向驾驶员给出清晰的扭矩反馈,从而克服动力转向的摩擦和力减小。如果源自地面处的主销后倾偏移的反馈是强的,则它还将减小除了横向方向上的扰动之外的围绕转向轴的扰动(如源自车辆的加速度的转向效应),从而变得相对小。
7.这种自对准设计也将在某种程度上增加在缓慢驾驶时所需的转向力。在较高的速度下,这种效应关于其他力通常具有重要意义。
8.另一个标准是:在非常缓慢的速度下具有方向盘回正性,在该非常缓慢的速度下,横向加速力太低而无法提供该回正性。转向轴朝向车辆中心线的法向力杠杆和倾斜度的量或值将在转动离开笔直向前位置时创建车辆的提升效应(lifting effect)。在转动之后释放方向盘时,这将创建自定心效应。
9.不幸的是,这种自对准设计也将会增加静止和缓慢驾驶时所需的转向力。在较高的速度下,这种效应关于其他力通常失去意义。
10.作用在轮胎上的法向力也将会给出围绕转向轴的转动力矩。在理想化情形中,来自左侧和右侧的这些力的总和将彼此平衡。当在不平坦的道路上驾驶、非对称装载的车辆进行驾驶、或在具有横向倾斜度的道路上驾驶时,力的总和将不为零,从而在方向盘中创建扰动扭矩。
11.此外,当车辆在弯道中驾驶时,外侧车轮比内侧车轮具有更高的法向负载(normal load),从而增加或减少(subtract)对驾驶员的反馈。
12.特殊情况是轮胎爆炸,该轮胎爆炸会突然导致非对称的法向力,并且因此导致突发转向扭矩改变,这可能严重影响驾驶员保持预期路线的能力。在重型车辆的情况下,如果车辆驶出(go off)道路,这种情形通常导致驾驶员死亡,或者导致迎面交通的汽车中的人员死亡。
13.针对法向力的杠杆可以至少在理论上被设置为零,以克服上面提到的问题。但是在实践中,由于其他因素和实际情况所设置的约束,该杠杆没有被设计为零。
14.即使杠杆可以被设置为零,有效杠杆也将不管怎样都随着道路与车轮之间的实际接触点的变化而改变。
15.如上所描述的那样基于转向反馈和回正性的情况下的折衷来在某种程度上减少高转向力的问题的尝试并不令人满意。
16.动力转向本身是用于尤其在停车时克服驾驶员的高手力的主要解决方案。针对接近笔直向前的较高速度具有低放大和在较低速度下具有高放大的期望存在冲突。这通过高度非线性的放大、助力弯道(boost-curve)来解决,该助力弯道是u形的,它尝试在目标之间进行折衷,但是可能导致非线性的转向感觉或在不同速度下过高或过低的转向力。
17.为了克服该速度困境,已经提出了不同的方式来操控作为速度函数的助力弯道。针对液压转向,本田已经提出了液压解决方案,而zf ag具有电子解决方案。这种设计遭受复杂且昂贵的缺点,并且当期望较低的辅助时,会导致对扰动的敏感性增加。它有时也会损害转向感觉和性能。
18.在eps(电动力转向)的情况下,以与液压情况中相比小得多的成本和复杂性惩罚来经由软件操控助力弯道。仍然,它并没有解决对扰动的敏感性增加的问题。
19.高转向力意味着动力转向必须能够应对更高的负载。因此,对动力转向本身提更高的要求将增加成本、重量、最大电流需求和整体功耗。
20.为了在动力转向故障时为驾驶员获得足够低的、合法的转向力度(steering effort),可以增加转向比(steering ratio)或者可以使用更大的方向盘。然而,这两种解决方案显著地损害了驾驶员的转向体验。
21.处置动力辅助故障的另一个手段是增加该系统的冗余。在重型车辆的情况下,可以复制动力转向泵,然而这将大幅增加成本和复杂性。
22.对于eps而言,可以使若干个子系统加倍或者甚至加到三倍,以在动力转向系统中实现足够的冗余。然而,在这种程度上使用冗余的子系统将增加成本和复杂性,并且是需要空间的。
技术实现要素:
23.因此,本发明的目的是分别提供一种车辆转向方法和一种车辆转向系统布置,通
过它们可以解决一个或多个上面提到的问题,并且通过它们可以克服一个或多个缺点。
24.特别地,目的是提供一种车辆转向方法和一种车辆转向系统布置,通过它们可以增加转向安全性。
25.甚至更特别地,目的是提供一种方法和一种车辆转向系统布置,通过它们可以在转向辅助丧失时增加转向安全性,并且特别地在转向辅助丧失的情况下便于转向。
26.另一个特定目的是提供目的,以分别提供一种方法和一种车辆转向系统布置,通过它们,可以在正常速度或高速度下、并且甚至更特别地至少在某种程度上也在低或非常低的驾驶速度(例如,低至停车辆速度)下增加转向安全性。
27.进一步地,特定目的是分别提供一种车辆转向方法和一种车辆转向系统布置,通过它们可以增加制动稳定性。
28.另一个特定目的是分别提供一种车辆转向方法和一种车辆转向系统布置,通过它们可以在转向辅助丧失时增加转向安全性,以及可以实现制动稳定性。
29.另一个特定目的是分别提供一种车辆转向方法和一种车辆转向系统布置,通过它们可以在不均匀的力的情况下增强转向安全性,该不均匀的力是例如由于一般而言在车辆的一侧下方的道路上而不是另一侧上的冰或粘土或不均匀分布的湿滑条件所致,或者由于突然的偏航(yaw)扰动所致。
30.又一个特定目的是分别提供一种车辆转向方法和一种车辆转向系统布置,其便宜且易于实现和制造。
31.另一个特定目的是分别提供一种车辆转向方法和一种车辆转向系统布置,通过它们可以在线控转向系统(wire steering system)进行的转向方面出现故障的情况下增强转向安全性。包括至少两个电机(一个用于驾驶员反馈,并且另一个用于转动车轮)的线控系统进行的转向在一个电机故障的情况下可以具有适度的退化。随着一个电机的故障,该转向布置实质上变成经由机械连接的常规动力转向系统。利用本发明,在降低的转向力的情况下,任一个电机都可以辅助驾驶员安全地转向,即使它是意图用于扭矩反馈的电机——通常比意图用于转动车轮的电机具有更低的容量。
32.更进一步,特定目的是分别提供一种车辆转向方法和一种车辆转向系统布置,其是可靠的、安全的,并且同时在高速度下、但是优选地也在低速度下、特别是在超过停车机动速度的所有速度下提供良好的转向感觉和转向响应(汽车如何对转向输入做出反应)。
33.本发明的目的还是提供一种车辆,通过该车辆可以实现一个或多个上面提到的目的。
34.因此,提供了分别如最初所提及的车辆转向方法和车辆转向系统布置,其具有相应的独立权利要求1和17的表征特征。
35.有利的实施例由相应的所附从属权利要求给出,并且分别在详细描述中被描述。
36.将领会的是,在不脱离如由所附权利要求限定的本发明的范围的情况下,本发明的特征易于以任何组合来组合。
附图说明
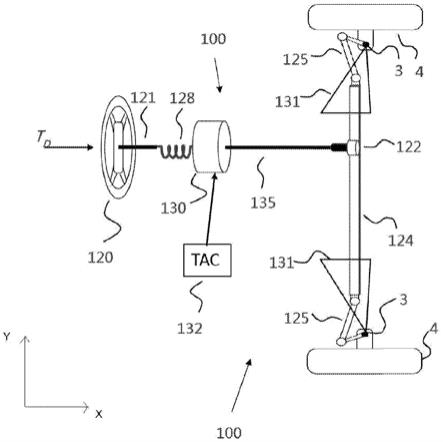
37.下文中将以非限制性的方式并参考附图来进一步描述本发明,在附图中:图1示意性地图示了根据本发明的一个示例性实施例的具有地面车辆的tac——
扭矩和/或角度控制以及前悬架的转向系统布置,图2示意性地图示了转向车轮的前视图以及图1中的转向系统布置的主要影响参数,以及图3示意性地图示了转向车轮的侧视图以及图1中的转向系统布置的主要影响参数。
具体实施方式
38.出于描述本发明的目的,并且为了便于理解本发明,给出了以下定义,这些定义将依赖于有利实施例的详细描述:定义:扭矩和/或角度参考控制(tac)分别包括转向感觉控制(sfc)和/或转向位置控制(spc)。对于转向感觉控制,驾驶员感觉到的方向盘扭矩的控制是主题,并且在转向位置控制中,其是对车轮角度的控制,并且具体地对于前车轮转向车辆而言,是对前轴车轮角度的控制,该前轴车轮角度这里被称为转向角(见下面的定义)。
39.转向角是转向系统中影响车辆的横向加速度或曲率的角度,该角度在转向系统中的某处被测量,其中这种转向角可以是:
‑ꢀ
前车轮角度,并且在例如阿克曼转向的情况下,转向角被定义为两个前车轮的角度的平均值;
‑ꢀ
铰接式车辆的铰接角度;
‑ꢀ
后车轮转向车辆的情况下,后车轮转向角;
‑ꢀ
在全车轮转向车辆的情况下,前车轮角度和后车轮角度的组合。
40.动力转向还将提供一种用于调节转向反馈的手段。
41.转向位置致动器是可以用于spc的致动器,该spc即影响以下各项中的一个或多个:转向角(诸如,前车轮转向角、后车轮转向角、车轮的个体转向角)、轴制动扭矩或力、车轮制动扭矩或力、个体轴上的驱动扭矩或力、个体车轮上的驱动扭矩或力、每个轴上的外倾角(camber angle)、或每个车轮上的外倾角。
42.特定类型的转向位置致动器是角度叠加致动器(angle overlay actuator)。角度叠加致动器是用于在转向柱中的某处实现相对角度的致动器。两个硬件概念主导了角度叠加致动器场景,即行星齿轮(planetary gear)(诸如在宝马中针对“前主动转向”的概念)以及谐波驱动(诸如在奥迪中的可变转向齿轮比(variable steering gear ratio))。
43.状态被定义为平移或旋转位置、速度或加速度、或者从这些前述状态中导出的状态,诸如例如车辆滑移角(slip angle),该车辆滑移角是车辆局部x轴与车辆速度矢量之间的角度。
44.对于sfc,液压动力转向(hps)已经被广泛使用,并且现在使用电动力转向(eps)。为了在sfc中给出驾驶员反馈,使用了eps,并且eps在本文档中将被称为反馈扭矩致动器或者仅被称为扭矩致动器。
45.重型车辆和农用车辆(诸如例如拖拉机)需要高的转向辅助水平。因此,当今的辅助致动器主要是液压辅助驱动的(因为液压具有高功率密度的事实)。这意味着,如果针对诸如例如车道保持辅助(lka)之类的功能,想要得到比标准液压辅助阀所能得到的可控性
更好的可控性,那么在hps致动器上方、即朝向方向盘侧添加eps致动器是可能的。因此,对于农用装备和重型车辆而言,现在正在出现hps和eps的组合,其中eps被安装在hps系统的方向盘侧上。hps致动器用于实现扭矩减小、辅助,并且因此被称为液压辅助致动器。
46.致动器是一种机构或系统,其被机械地操作或由ecu来操作,并且将能量源(通常是电流、液压流体压力或气动压力)转换成运动、力或扭矩。
47.可变齿轮比(vgr)或可变转向齿轮比是用于以使方向盘与车轮之间的齿轮比遵循速度相关函数的这种方式来控制角度叠加致动器的功能。通过以这种方式来控制角度叠加致动器,可以使得转向响应是车辆速度相关的。
48.其他功能(诸如例如安全性功能)也可以受益于角度叠加致动器。这种安全性功能例如是转向过度补偿或转向不足补偿,在转向过度补偿中,转向角以通过反向转向(counter steering)来减小转向过度的这种方式被控制,在转向不足补偿中,该功能以如下这种方式来控制转向角:以最优方式来使用轮胎-道路摩擦,从而减小否则会被过度夸大的转向角。通过转向角控制的这些示例,方向盘不一定需要移动,这是因为角度叠加致动器增加了在不移动方向盘角度的情况下移动转向角所必需的角度。
49.扭杆(torsion-bar)扭矩是通过使用对安装在转向柱中的某处的特定扭杆的扭曲敏感的传感器所测量的扭矩。
50.方向盘扭矩是从驾驶员施加到方向盘的力所得到的扭矩。该方向盘扭矩通常通过扭杆扭矩来近似。
51.驾驶员扭矩等于方向盘扭矩。
52.信号总线是传输路径,在其上可以读取和/或传输信号。
53.输入信号例如可以是从驾驶员经由方向盘施加的力所得到的扭矩的度量——该扭矩在方向盘与车轮之间的某处被测量、或者是可以从中导出该量的信号。
54.ecu是电子控制单元,其用于读取可以通过例如信号总线而到来的模拟传感器信号和数字信号,执行任何类型的计算,诸如例如要么经由所发送的模拟或数字信号、要么通过从电机控制级直接控制例如电动机来执行控制任务以及使致动器致动。
55.可控性描述了外部输入的如下能力:即,在有限的时间间隔内将系统的内部状态(实际值)从任何初始状态移动到任意另一个最终状态(目标值),从而最小化目标值与实际值之间的差异,即控制误差。
56.横向加速度反馈扭矩是驾驶员感觉到的扭矩,其对应于车辆的横向加速度。
57.可以从车辆模型来计算横向加速度,该车辆模型使用车辆速度和转向角作为输入。横向加速度反馈扭矩进而是从该车辆模型计算的横向加速度的函数(例如,从表格或矩阵所计算、获得的函数)。
58.轮胎摩擦扭矩是通过轮胎与道路之间的摩擦或该摩擦的模型生成的扭矩。当转动车轮时,必须克服轮胎与道路之间的摩擦,其是轮胎摩擦扭矩。
59.轮胎摩擦扭矩的数学模型是角度或角速度驱动迟滞(angle or angular speed driven hysteresis)的模型。轮胎的数学模型还包含松弛部分(relaxation part),使得在轮胎滚转时,迟滞的扭矩将具有松弛长度,使得迟滞扭矩随着轮胎的滚转长度而减小。松弛可以优选地是众所周知的半衰期指数衰减函数。轮胎摩擦的模型是迟滞和松弛的组合,使得例如归因于迟滞扭矩的增加可以与归因于松弛的扭矩减小同时发生。该模型的所得扭矩
是这两个部分的总和。
60.转向系统摩擦或摩擦扭矩是转向系统的联动装置(linkage)的部分的摩擦或该摩擦的模型。
61.转向系统摩擦扭矩的数学模型是角度或角速度驱动迟滞的模型。迟滞中的最大扭矩可以通过函数来成形,使得最大扭矩在中心上与中心外(off centre)相比是不同的。
62.阻尼扭矩归因于轮胎和转向系统的阻尼或该阻尼的模型而出现。
63.阻尼扭矩的数学模型由一些阻尼常数乘以角速度或平移速度(诸如例如齿条速度)组成,该速度在车轮与方向盘之间的联动装置中的某处被测量。阻尼常数可以是如下这样的:使得阻尼具有泄放(blow-off),以使得对于大的角速度或平移速度,阻尼常数减小。阻尼常数可以是车辆速度相关的,以及与向内转向相比对于向外转向是不同的。阻尼常数也可以是方向盘或扭杆扭矩的函数。
64.回正性扭矩来自转向系统的几何结构(geometry)或转向系统的模型。
65.回正性扭矩是车辆速度相关的且方向盘角度相关的扭矩。
66.这些扭矩贡献可以全部是车辆速度相关的。这些扭矩贡献也可以经由数学模型来计算或者经由车辆或转向系统中的传感器来感测。
67.补偿扭矩是上面提到的轮胎摩擦扭矩、摩擦扭矩、阻尼扭矩和回正性扭矩的总和。补偿扭矩的部分是从不同扭矩部分的数学模型来计算的。
68.用于转向感觉的参考生成器概念(reference generator concept)是一种闭环控制方法,其中首先计算参考值或目标值,并且然后控制转向辅助以最小化目标值与对应的测量值之间的误差。用于转向的参考生成器概念可以具有两个种类,即扭矩参考生成器概念和角度参考生成器概念。
69.扭矩参考生成器是一种转向感觉控制概念,其中在参考生成器中计算方向盘扭矩,从而给出参考方向盘扭矩,并且然后将该参考方向盘扭矩与所测量的方向盘扭矩进行比较,并且将差异——方向盘扭矩误差馈送到控制器,使得可以最小化方向盘扭矩误差。换句话说,参考方向盘扭矩用于通过使用闭环控制来控制反馈扭矩致动器。
70.目标方向盘扭矩是横向加速度反馈扭矩、上面提到的轮胎摩擦扭矩、摩擦扭矩、阻尼扭矩和回正性扭矩的总和。
71.角度参考生成器是一种转向感觉控制概念,其中在参考生成器中计算方向盘角度,从而给出参考方向盘角度,并且然后将该参考方向盘角度(参考反馈扭矩致动器角度)与所测量的方向盘角度进行比较,并且将差异——方向盘角度误差馈送到控制器,使得可以最小化该误差。换句话说,可以说参考扭矩致动器角度用于将反馈扭矩致动器控制到该参考角度。
72.在角度参考生成器中,目标转向角基于目标方向盘扭矩的等式,在该等式中,目标方向盘扭矩是横向加速度反馈扭矩、上面提到的轮胎摩擦扭矩、摩擦扭矩、阻尼扭矩和回正性扭矩的总和。如果该等式中的目标方向盘扭矩被改变为所感测或估计的驾驶员扭矩,则可以从该转向角相关等式中导出转向角。该导出的转向角是角度参考生成器的目标转向角。
73.目标方向盘扭矩的部分是从不同扭矩部分的数学模型来计算的。
74.可以从转向感觉的等式来计算目标方向盘角度,在该等式中,扭杆扭矩应当等于
如上所描述的目标方向盘扭矩。现在,根据该等式,可以计算目标方向盘角度。
75.目标方向盘角度的部分是从不同扭矩部分的数学模型来计算的。
76.车辆状态控制器被定义为用于以受控的方式在车辆中实现目标状态的动态函数。也就是说,以受控的方式来最小化目标状态与实际状态之间的差异,即控制误差。
77.pid控制器是一种比例-积分-微分控制器,它是一种控制回路反馈机制,广泛用于工业控制系统以及需要连续调节的控制的各种其他应用中。pid控制器连续地计算误差值e(t),作为目标值与所测量的过程值之间的差异,并且基于比例、积分和微分项(分别被标示为p、i和d)来应用校正,这些项将它们的名称给到控制器。实际上,它自动地将准确且响应迅速的校正应用于控制函数。日常示例是道路车辆上的巡航控制;其中诸如坡度之类的外部影响将引起速度改变,并且驾驶员具有更改期望设定速度的能力。pid算法通过控制车辆引擎的功率输出从而在没有延迟或超调量(overshoot)的情况下以最优方式将实际速度恢复到期望速度。pid控制器、pid控制器的i部分有时可能遭受积分饱和(integral windup)。
78.积分饱和(也被称为积分器饱和或复位饱和)指代pid反馈控制器中的如下情形:其中发生了目标值中的大改变(比如正改变)并且积分项在该上升(饱和)期间累积了显著的误差,从而超调并且随着该累积误差被消除(unwind)(被另一个方向上的误差抵消)而继续增加。具体问题是过度超调。
79.抗饱和是对积分饱和问题的一组解决方案的术语。该问题可以通过以下方式来解决:
‑ꢀ
将控制器积分初始化为期望值,例如该问题之前的值;
‑ꢀ
以合适的斜坡(ramp)来增加目标值;
‑ꢀ
禁用积分函数,直到待控制的过程变量已经进入可控制区域;
‑ꢀ
防止积分项累积到预定界限以上或以下;
‑ꢀ
反向计算积分项,以将过程输出约束在可行界限内。
80.车辆状态致动器是当被致动时影响一个或若干个车辆状态的致动器。车辆状态致动器是制动器、引擎、可控制的四轮驱动离合器、可控制的差速器、主动阻尼器、电气或液压车轮电机以及电气或液压驱动轴。
81.目标值、参考值或请求是通过使用闭环控制器和/或前馈控制器实现的致动器的设定点。
82.车辆模型是一种数学模型,该模型将车轮角度和车辆速度变换成多个车辆偏航和/或横向状态,即车辆偏航率和加速度、车辆横向速度和加速度、以及车身滑移角。
83.变换被定义为数学函数或查找表,其中一个输入值用于产生一个输出值。这意味着可以使用具有其可调参数的变换,以利用任意可调形状来创建输入值与输出值之间的关系。变换可以具有时变参数,这些参数甚至依赖于其他值,即所谓的增益调度,使得该变换是具有如下参数的函数:这些参数本身也是函数。这种变换的示例是车辆状态与驾驶员扭矩的关系,其中该关系是车辆速度相关的连续上升的递减成形函数(degressive shaped function)。
84.方向盘扭矩测量结果是在转向柱或方向盘中测量的扭矩或在转向齿条中测量的力乘以转向齿条与方向盘之间的扭矩比。
85.转向角在这里指代方向盘与车轮之间的任何角度乘以角度自由度与方向盘角度
自由度之间的比。它也可以是齿条位置乘以其在齿条平移自由度与方向盘角度自由度之间的比。
86.车辆轴和坐标系,其中x处于水平面和行进的前向方向上。y处于水平面上,垂直于x,并且指向左边。z指向上。
87.传感器:abs传感器或车轮速度传感器是测量车轮速度的传感器。
88.速率陀螺仪传感器测量在偏航、俯仰(pitch)或滚转方向上围绕轴的角速度。
89.加速度传感器测量纵向、横向或垂直方向上的加速度。
90.位置传感器测量位置。它可以是局部、区域性或全球范围的覆盖。一般被称为gps。
91.制动踏板传感器指示踏板是否被踩下。
92.制动压力传感器测量制动系统中的压力。
93.术语tac(扭矩和/或角度参考生成器控制概念)用于sfc和/或用于spc。
94.图1是转向系统100的示意图。在前轴转向车轮4与扭矩致动器130之间存在联动装置。联动装置由具有相关联拉杆125的转向齿条124组成,该转向齿条124经由小齿轮122连接到去往扭矩致动器130的柱轴135。反馈扭矩由扭矩致动器130来致动,扭矩致动器130由tac 132(扭矩和/或角度控制器)控制的辅助电机组成。tac 132将控制对驾驶员的扭矩反馈,并且控制转向车轮4的角度。
95.在wo2010144049中描述了扭矩和/或角度控制的一个示例,其内容同此通过引用并入本文中。同一申请人的wo2019182496中也描述了扭矩和/或角度控制的示例,其内容同此通过引用并入本文中,其中转向角和车辆速度用于实现目标方向盘扭矩。目标方向盘扭矩是使用数学模型来计算的。作为示例,目标方向盘扭矩包括以下扭矩贡献中的一个或多个:横向加速度反馈扭矩、转向系统摩擦扭矩、轮胎摩擦扭矩、阻尼扭矩和方向盘自对准扭矩。然后,经由闭环电流控制来控制所提到的反馈扭矩致动器,以实现所述目标方向盘扭矩。这里,首先将目标方向盘扭矩变换成目标电机电流,并且将该目标电机电流与实际电机电流进行比较,其中这两者之间的差异将形成控制误差。然后,使用控制器来最小化该控制误差,以实现目标电流,并且因此实现目标方向盘扭矩。
96.在图1中,在扭矩致动器130上方,存在具有扭矩传感器的扭杆128,该扭矩传感器用于测量驾驶员扭矩,即由驾驶员在方向盘120中施加的力td所引起的扭矩,该扭矩通过方向盘轴121被传递到扭杆128。转向车轮4附接到车辆,并且被布置成使得它们能够围绕转向轴3转动。转向轴3的取向由悬架131的设计来确定。
97.图2是转向车轮4的示意性后至前视图(back to front view),其图示了影响转向特性的主要参数。车轮4围绕转向轴3转向。在车轮中心1与垂直于转向轴3之间存在距离,该距离被标示为车轮中心处的法向转向轴偏移6。地面处的法向转向轴偏移7是从车轮接触中心2垂直于转向轴3的距离。在z轴与转向轴3到yz平面上的法向投影之间存在转向轴倾斜角5。
98.图3是转向车轮4和上面提及的主要影响参数的示意性侧视图。转向车轮4围绕转向轴3转动。在z轴与转向轴3在xz平面上的法向投影之间存在主销后倾角9。转向轴3与道路平面的交集是转向轴道路交点13。车轮中心处的主销后倾偏移8是车轮中心1与转向轴3到如下平面上的投影之间的距离:该平面垂直于xy平面并且平行于车轮平面与xy平面的交
集。地面处的主销后倾偏移10是从转向轴道路交点13到车轮接触中心2的x方向上的距离。车轮地面横向力点12是车轮与地面之间的横向力的总和所位于的点。气动拖距(pneumatic trail)11是x方向上的车轮接触中心2与车轮地面横向力点12之间的距离。
99.如上所提及的,本发明的目的是通过取而代之使用tac(或tac与bcps相组合)来实现特性的改进,从而至少部分地消除或最小化一个或多个约束,这些约束限制了对通常使用bcps的车辆的设计。tac的使用还将使得能够实现针对不同车辆状态的期望转向效应,从而给予对于受到外力和几何结构严重限制的常规bcps和悬架布局而言甚至不可能的机会。
100.通过使用tac来提供反馈和车轮角度控制并且同时将地面处的主销后倾偏移10(主销后倾拖距)加上气动拖距11减小到接近于零,可以甚至在轮胎接触面处具有高横向力的情况下也实现非常低的或零(甚至是负)的转向力,同时向驾驶员提供期望的转向反馈。地面处的主销后倾偏移10由三个参数来主导,并且在某种程度上由这些参数的组合来主导,这些参数即主销后倾角9、车轮中心处的主销后倾偏移8、以及车轮直径。随着主销后倾角9增加,将存在更大的地面处的主销后倾偏移10。在存在一定量的主销后倾角9的条件下(即,该角度≠0),更大的车轮也将会增加、或者更确切地说放大地面处的主销后倾偏移10。随着车轮中心处的主销后倾偏移8增加,地面处的主销后倾偏移10也将随后增加,但是与主销后倾角9和车轮直径无关。当一般地为了实现低转向力、以及特别地针对在动力转向故障时的低手力而设置主销后倾角9、地面处的主销后倾偏移10、以及车轮直径的组合时,对于正常驾驶而言,将出现某些缺陷。主要的缺陷是来自车轮的反馈力——其提供了来自横向加速度等的反馈——将会非常低,并且从传统bcps提供的辅助将感觉到被过度辅助(over assist),其具有过低的对驾驶员的横向反馈。针对动力转向故障时的手力的法律要求仅用于极低速度,在该极低速度下,横向力是低的。在较高速度下,对于正常驾驶而言更容易最终得到较高的横向力。在这种情形中,动力转向故障由于速度本身而更加严重,从而给出更短的时间来迅速且高效地做出反应,并且动能更大,这进而将导致更高的碰撞暴力的事故。本发明将特别擅长改进这种情形。它对于正常的转向齿轮以及具有机械备份的线控转向系统在故障时进行的转向将是有效的。来自较低转向力的额外收获(bonus)是较不昂贵的动力转向、更少的最大电流需求、更低的整体能耗、以及更轻的转向系统。具有小的地面处的主销后倾偏移10的另一个优点是:车辆将较不容易出现被标示为摆振(shimmy)的前端振动现象。
101.经由方向盘对驾驶员的反馈的另一个源来自于车轮中心处的法向转向轴偏移6,该法向转向轴偏移6是围绕转向轴3的杠杆,该杠杆将来自轮胎的法向力馈送到转向联动装置中。在笔直向前行驶的理想情形中,来自左侧和右侧的法向力的总和相互抵消掉。在转弯时,法向力不会被抵消掉,这是因为外侧轮胎将比内侧轮胎承受更多的法向力。在更常见的悬架设计(即,车轮中心处的法向转向轴偏移6的正值和主销后倾角9的正值)中,转弯期间的法向力将向驾驶员给予负反馈,从而在某种程度上抵消车轮地面横向力点12处的来自横向方向的力。理论上,来自源于横向力和法向力的反馈的力可以被平衡掉,从而在动力转向(ps)故障时给予低转向力度。然而,这在bcsp的情况下是不可能的,因为在正常驾驶时,它将向驾驶员给予非常差的质量的反馈,这是由于期望信号非常低并且对于不想要的扰动是敏感的。这将需要车轮中心处的法向转向轴偏移6具有某个≠0的值,这进而将导致一些负面影响。车轮中心处的法向转向轴偏移6本身也将会对扰动做出贡献,例如源自从左到右非
对称装载的车辆的反馈、由于翘曲的道路(cambered road)所致的负载移位、来自不平坦道路的垂直力输入、对不平衡车轮引起的振动的敏感性等。非常特殊的情况是当车辆发生了前部轮胎爆炸时。法向力中的突然且强烈的差异将生成转向效应,该转向效应对于驾驶员来说可能是不可能充分抵消的,并且从而导致与预期路径的偏离。如果它是重型车辆,则这通常导致驶出道路或驶入迎面交通中,这两种情况都涉及致命后果的高风险。
102.总的来说,对于bcps而言,出于许多原因,车轮中心处的法向转向轴偏移6可能期望保持为零或低,但是出于其他属性和实际原因,具有较高的值是更好的。这导致了折衷,该折衷严重地限制了针对正常驾驶和ps故障期间的安全操纵性两者的最优性能。当与tac结合地使用低力反馈悬架几何结构时,所有这些缺陷将被克服,从而在正常驾驶情形中提供期望的反馈,同时该几何结构本身将在ps故障时以可接受的反馈质量来提供足够低的转向力。如上所描述的那样,辅助驾驶员来实现期望的转向角和所得路径、而不是像bcps那样仅仅给出一些增加的力的tac原理将有效地支持驾驶员保持在轨道上,即使在轮胎爆炸的情况下也是如此。
103.如上面的本文中所描述,对于bcps而言,为了在ps故障时实现低转向力度,通常将需要车轮中心处的法向转向轴偏移6具有某个≠0的值。如果车轮中心处的法向转向轴偏移6是针对低转向力而优化的,即车轮中心处的法向转向轴偏移6接近于零,那么由于转向轴倾斜角5的值,通常会给出如下效应:负的地面处的法向转向轴偏移7。虽然地面处的法向转向轴偏移7可以生成对于在split-mu时的制动有益的转向效应,但是当在弯道中制动时,它可能具有对于稳定性不利的转向效应,这通常导致这两个属性之间的折衷,并且还用于在低速度下生成一些方向盘回正性。当使用tac来代替bcps时,转向效应在角度控制器内利用算法来成形。
104.对于弯道中的制动,具有反向转向效应、即在应用制动时减小转向角是合期望的。当检测到弯道中的制动时,角度控制器将减小转向角。控制器将通过组合地监测一个或多个传感器来检测制动。传感器例如是以下各项中的一个或多个:用于制动踏板应用的开关、制动压力传感器、(abs)车轮速度传感器、纵向加速度传感器、俯仰陀螺仪传感器、以及定位传感器(如gps)。车辆在弯道中行驶将通过组合地监测一个或多个传感器来检测。这些传感器是(abs),例如车轮速度传感器、横向加速度传感器、偏航率陀螺仪传感器、方向盘角度传感器、方向盘扭矩传感器。
105.类似的情况是弯道中的减速(retardation),但是没有应用制动踏板。在这种情况下,不使用来自制动踏板应用和制动压力传感器的信号。
106.对于split-mu时的制动,即当车辆车轮的一侧具有良好抓地力并且车辆另一侧上的车轮展现出差抓地力时,从左侧到右侧的不同制动力将在车辆上创建朝向具有良好抓地力的一侧的方向上的转动力矩。在这种情况下,合期望的是,使对具有差抓地力的一侧的转向效应抵消该转动力矩,从而实现驾驶员通过方向盘输入所指示的路径。当检测到关于split-mu的制动时,角度控制器将增加该抵消转向角。控制器将通过组合地监测一个或多个传感器来检测制动。传感器例如是以下各项中的一个或多个:用于制动踏板应用的开关、制动压力传感器、(abs)车轮速度传感器、纵向加速度传感器、俯仰陀螺仪传感器、以及定位传感器(如gps)。
107.为了良好的转弯、即在方向盘上做出步进转向输入(step steer input),期望在
瞬时阶段中具有比稳态转弯更高的转向车轮响应。这将使得汽车感觉更加响应迅速,这是因为转向输入与车辆中的响应之间的阶段滞后(lag)将更低。实现这一点的传统方式是在滚转期间具有来自于悬架几何结构的一些滚转转向不足(rollundersteer),这减小了当车辆滚转时、即向一侧或另一侧倾侧(lean)时的转向车轮角度。缺陷是:这通常在越过突起物时等导致前束(toe-in)改变,该前束改变可能引起路线不稳定。由于它也依赖于车辆的滚转角度,因此可能难以得到期望的效应,这是由于具有平坦的车辆行为、即转弯时的低滚转角度也是合期望的。在tac的情况下,转向车轮角度可以针对瞬时转弯阶段被设置得更高,并且针对稳态转弯被设置得更低,而不具有针对其他条件的扰动转向效应。控制器将通过组合地监测一个或多个传感器来检测瞬时转弯,这些传感器例如方向盘角度传感器、方向盘扭矩传感器、横向加速度传感器、偏航率陀螺仪传感器中的一个或多个。通过还使用来自(abs)车轮速度传感器的车辆速度信息和/或来自定位系统(例如gps)的定位数据,该效应将是速度相关的。
108.当使用tac来代替bcps时,如上所描述的那样在控制算法内精确地实现转向效应,这是因为方向盘回正性、车轮中心处的法向转向轴偏移6以及转向轴倾斜角5可以被优化以用于降低转向力。传统上,必须在某种程度上选择低的转向轴倾斜角5以用于降低转向力,但是然后只能具有低速度下的较差回正性的折衷。此外,由于包装原因,低转向轴倾斜角5可能难以实现,并且具有若干个球窝接头(ball joint)的复杂前悬架设计已经被用于实现低转向轴倾斜角5,其具有期望的地面处的法向转向轴偏移7和车轮中心处的法向转向轴偏移6。与其他低转向轴倾斜角5设计一样,这些设计也将遭受较差的回正性,但是也可能经历成本、损坏、摩擦或冲击。在本发明的情况下,具有低转向轴倾斜角5的低转向力设计将依赖于用于回正性的控制函数。由于来自纵向力的转向效应也由函数来控制,而不是由地面处的法向转向轴偏移7和车轮中心处的法向转向轴偏移6来控制,因此这将允许更简单的悬架设计,该设计仍然可以针对低转向力而被优化,从而在ps故障时实现良好的操纵性。
109.将车轮中心处的法向转向轴偏移6保持为低的另一个原因是:这也将使得悬架几何结构对于将源自非对称左车轮和右车轮驱动扭矩的扭矩扰动传递到驾驶员较不敏感。不相等的驱动扭矩可能具有不想要的性质,如来自差速器中的摩擦或者来自于扭矩矢量系统的驱动扭矩中的期望差异。但是,如之前所提到的,将车轮中心处的法向转向轴偏移6保持为低或零将不会使转向力最小化。归功于针对转向角和驾驶员反馈的控制设计,本发明,其中tac可以与提供了低转向力的车轮中心处的法向转向轴偏移6一起仍然提供对任何产生的扭矩转向效应的几乎完全的不敏感性。它也将对轮胎横向方向上漂移的(wandering)车轮接触中心2不敏感,这对于传统前悬架来说甚至是不可能的。特别重要的是,转向几何结构的组合针对低齿条力而被优化,但是仍具有自定心力,以遵守涉及对车辆关于转向装备的批准的统一规定,寻求针对其车辆的un类型批准的任何一方都必须遵守的un法规no. 79将使得驾驶员有可能同时在宽得多的前轴负载范围内安全地处置辅助丧失,这是由于tac提供了极其良好的转向感觉。
110.应当清楚的是,本发明不限于具体说明的实施例,而是它可以在所附权利要求的范围内以多种方式变化。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。