技术特征:
1.一种用于车辆中的车辆转向的方法,所述车辆具有允许车轮转向的车辆悬架,并且包括具有一个或多个反馈扭矩致动器(130)的动力辅助车辆转向系统(100’),并且其中借助于扭矩和/或角度控制系统tac(132)来控制转向感觉,所述扭矩和/或角度控制系统tac(132)直接或间接感测和/或计算至少方向盘角度和方向盘扭矩,并且控制所述(一个或多个)反馈扭矩致动器(130),其中允许车轮转向的车辆悬架包括多个车辆悬架参数或元素(5;8;9;10)或者由所述多个车辆悬架参数或元素来定义,其特征在于:它包括:
‑ꢀ
选择或设计所述车辆悬架参数或元素(5;8;9;10)中的一个或多个的几何结构和/或尺寸来减小或最小化使驾驶中的车辆转向所需的转向力,这是结合如下操作进行的:
‑ꢀ
使用包括扭矩参考生成器的所述扭矩和/或角度控制系统tac(132),以用于至少基于直接或间接感测和/或计算的方向盘角度和/或方向盘扭矩来控制车轮转向角,并且通过控制所述(一个或多个)反馈扭矩致动器(130)来提供反馈控制,以生成目标反馈扭矩和/或目标方向盘角度、以及目标转向感觉,并且因此还减少或消除对车辆悬架所提供的驾驶员反馈的需要,使得如果转向控制中存在故障从而丧失了辅助,则转向力度将足够低以供驾驶员安全地处置,因此致使对失效-操作转向齿轮的需要是多余的。2.根据权利要求1所述的方法,其特征在于:所述扭矩和/或角度控制系统tac(132)包括用于控制所述反馈扭矩致动器(130)的角度参考生成器。3.根据权利要求1-2中任一项所述的方法,其特征在于:从驾驶员经由方向盘(120)施加的扭矩值中减去包括以下补偿扭矩部分中的一个或多个的补偿扭矩:
‑ꢀ
轮胎摩擦扭矩,其是所感测或估计的偏航和/或横向车辆状态的函数,
‑ꢀ
转向系统摩擦扭矩,其是所感测或估计的偏航和/或横向车辆状态的函数,
‑ꢀ
阻尼扭矩,其是所感测或估计的偏航和/或横向车辆状态的导数的函数,以及
‑ꢀ
回正性扭矩,其是所感测或估计的偏航和/或横向车辆状态的函数。4.根据前述权利要求中任一项所述的方法,其特征在于:前车轮悬架车轮是可转向的。5.根据前述权利要求中任一项所述的方法,其特征在于:后车轮悬架车轮是可转向的。6.根据前述权利要求中任一项所述的方法,其特征在于:所述车辆悬架参数或元素(5;8;9;10)包括转向轴取向定义参数。7.根据权利要求6所述的方法,其特征在于:
所述车辆悬架参数或元素/车辆悬架参数或元素包括地面处的主销后倾偏移距离、主销后倾拖距(10),并且其特征在于,所述主销后倾拖距(10)被设计成尽可能接近零,特别地在-40mm与 20mm之间,甚至更特别地在-20mm与 10mm之间,或者甚至更特别地在-10mm与 5mm之间,或者最特别地基本上为0。8.根据权利要求7所述的方法,其特征在于:主导所述主销后倾拖距(10)的悬架影响参数是主销后倾角(9)、车轮中心处的主销后倾偏移(8)以及车轮半径。9.根据前述权利要求中任一项所述的方法,其特征在于:所述车辆悬架参数或元素/车辆悬架参数或元素包括转向轴倾斜度(5),并且其特征在于,所述转向轴倾斜度(5)被设计成尽可能小,例如基本上为0
°
,或者近似在-2
°
与 8
°
之间,或者甚至更特别地在-1
°
与 3
°
之间。10.根据前述权利要求中任一项所述的方法,其特征在于:所述参考生成器是用于计算目标反馈扭矩的反馈扭矩参考生成器,并且辅助扭矩被控制,使得反馈扭矩误差被最小化。11.根据权利要求1-9中任一项所述的方法,其特征在于:所述参考生成器是用于计算目标转向角的转向角参考生成器,并且辅助扭矩被控制以最小化转向角误差。12.根据前述权利要求中任一项所述的方法,其特征在于:
‑ꢀ
对至少一个输入信号的测量包括使用车轮速度传感器或驱动轴速度传感器,并且其特征在于,所述方法进一步包括以下步骤:
‑ꢀ
使用所述至少一个输入信号来计算车辆速度。13.根据前述权利要求中任一项所述的方法,其特征在于:它包括以下步骤:
‑ꢀ
根据来自所述至少一个传感器的附加输入信号来确定转向角,包括转向系统中的任何角度或齿条位置,所述至少一个传感器包括位于转向系统中的转向柱或其他地方中的角度或位置传感器,所述转向角例如是所感测的角度乘以所述传感器的传感器元件的旋转或平移与参考转向角下的旋转之间的比。14.根据前述权利要求中任一项所述的方法,其特征在于:所述反馈扭矩致动器(130)或所述反馈扭矩致动器(130)中的一个是闭环控制的。15.根据前述权利要求中任一项所述的方法,其特征在于:所述反馈扭矩致动器(130)提供所有转向辅助致动器功能。
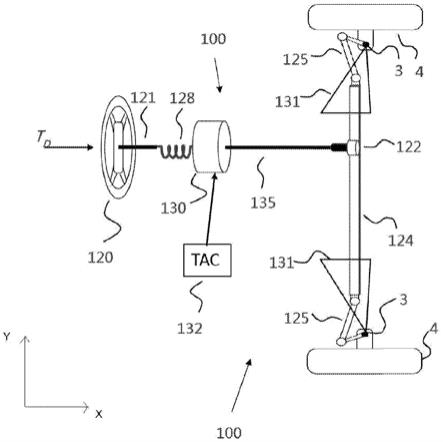
16.一种车辆中的车辆转向系统布置(100),所述车辆具有允许车轮转向的车辆悬架,并且包括具有一个或多个反馈扭矩致动器(130)的动力辅助车辆转向系统(100’),并且其中借助于扭矩和/或角度控制系统tac(132)来控制转向感觉,所述扭矩和/或角度控制系统tac(132)直接或间接感测和/或计算至少方向盘角度和方向盘扭矩,并且控制所述(一个或多个)反馈扭矩致动器(130),其中可控制的车辆悬架包括多个车辆悬架参数或元素(5;8;9;10)或者由所述多个车辆悬架参数或元素来定义,其特征在于:
‑ꢀ
设计或选择一个或多个车辆悬架参数或元素(5;8;9;10)的几何结构和/或尺寸来减小或最小化使驾驶中的车辆转向所需的转向力,
‑ꢀ
所述扭矩和/或角度控制tac(132)包括参考生成器,并且被布置成至少基于所述直接或间接感测和/或计算的方向盘角度和/或方向盘扭矩来控制车轮转向角,并且通过控制所述(一个或多个)反馈扭矩致动器来提供反馈控制,以生成目标反馈扭矩和目标转向感觉,并且因此减少或消除车辆悬架所提供的驾驶员反馈,使得如果丧失了转向辅助、例如如果转向控制中存在故障,则转向力度将足够低以供驾驶员安全地处置,因此无需失效-操作转向齿轮。17.根据权利要求16所述的车辆转向系统布置(100),其特征在于:所述扭矩和/或角度控制系统tac(132)包括用于控制所述反馈扭矩致动器(130)的参考生成器。18.根据权利要求16所述的车辆转向系统布置(100),其特征在于:所述扭矩和/或角度控制系统tac(132)包括用于控制所述反馈扭矩致动器(130)的角度参考生成器。19.根据权利要求16-18中任一项所述的车辆转向系统布置(100),其特征在于:从驾驶员经由方向盘(120)施加的扭矩值中减去包括以下补偿扭矩部分中的一个或多个的补偿扭矩:
‑ꢀ
轮胎摩擦扭矩,其是所感测或估计的偏航和/或横向车辆状态的函数,
‑ꢀ
转向系统摩擦扭矩,其是所感测或估计的偏航和/或横向车辆状态的函数,
‑ꢀ
阻尼扭矩,其是所感测或估计的偏航和/或横向车辆状态的导数的函数,以及
‑ꢀ
回正性扭矩,其是所感测或估计的偏航和/或横向车辆状态的函数。20.根据权利要求16-19中任一项所述的车辆转向系统布置(100),其特征在于:前车轮和/或后车轮悬架是可转向的。21.根据权利要求16-20中任一项所述的车辆转向系统布置(100),其特征在于:所述车辆悬架参数或元素包括转向轴取向定义参数。22.根据权利要求21所述的车辆转向系统布置(100),其特征在于:
所述车辆悬架参数或元素/车辆悬架参数或元素包括地面处的主销后倾偏移距离、主销后倾拖距(10),并且其特征在于,所述主销后倾拖距(10)被设计成尽可能接近零,特别地在-40mm与 20mm之间,甚至更特别地在-20mm与 10mm之间,或者甚至更特别地在-10mm与 5mm之间,或者最特别地基本上为0。23.根据权利要求22所述的车辆转向系统布置(100),其特征在于:主导所述主销后倾拖距(10)的悬架影响参数是主销后倾角(9)、车轮中心处的主销后倾偏移(8)以及车轮半径。24.根据权利要求16-23中任一项所述的车辆转向系统布置(100),其特征在于:所述车辆悬架参数或元素/车辆悬架参数或元素包括转向轴倾斜度(5),并且其特征在于,所述转向轴倾斜度(5)被设计成尽可能小,例如基本上为0
°
,或者近似在-2
°
与 8
°
之间,或者甚至更特别地在-1
°
与 3
°
之间。25.至少根据权利要求17所述的车辆转向系统布置(100),其特征在于:所述参考生成器是用于计算目标反馈扭矩的反馈扭矩参考生成器,并且辅助扭矩被控制,使得反馈扭矩误差被最小化。26.根据权利要求17-24中任一项所述的车辆转向系统布置(100),其特征在于:所述参考生成器是用于计算目标转向角的转向角参考生成器,并且辅助扭矩被控制以最小化转向角误差。27.根据权利要求16-26中任一项所述的车辆转向系统布置(100),其特征在于:所述反馈扭矩致动器(130)或所述反馈扭矩致动器(130)中的一个是闭环控制的。28.一种车辆中的车辆转向系统布置(100),所述车辆具有允许车轮转向的车辆悬架,并且包括具有一个或多个反馈扭矩致动器(130)的动力辅助车辆转向系统(100’),并且其中借助于扭矩和/或角度控制系统tac(132)来控制转向感觉,所述扭矩和/或角度控制系统tac(132)直接或间接感测车辆状态参数和/或计算由驾驶员引入的包括方向盘角度和方向盘扭矩的转向效应,并且控制所述(一个或多个)反馈扭矩致动器(130),其特征在于:所述tac(132)包括用于监测和测量一个或多个车辆状态的一个或多个车辆状态传感器;所述tac(132)包括用于确定除了由驾驶员引入的转向效应的附加转向效应的算法,以增强车辆遵循驾驶员意图的程度,其中所述附加转向效应的值是利用描述了车辆行为的数学模型从所监测和测量的(一个或多个)车辆状态中导出的;所述扭矩和/或角度控制tac(132)被布置成用于基于由监测一个或多个车辆状态参数的一个或多个传感器进行的测量来控制车轮转向角,并且通过控制所述反馈扭矩致动器来提供反馈控制,以生成反馈扭矩以及目标转向感觉和所述附加转向效应,并且所述附加转向效应因此基本上与车辆悬架无关。
29.一种车辆,其具有允许车轮转向的车辆悬架以及动力辅助车辆转向系统,其特征在于:它包括如权利要求17-29中任一项所述的车辆转向系统布置(100)。
技术总结
本发明涉及车辆转向系统布置(100),其包括允许车轮转向的车辆悬架和具有反馈扭矩致动器(130)的动力辅助车辆转向,借助于扭矩和/或角度控制系统TAC(132)来控制转向感觉。具有可转向车轮的车辆悬架包括多个车辆悬架参数,并且一个或多个车辆悬架参数或元素的几何结构和/或尺寸被设计成减小或最小化使驾驶中的车辆转向所需的转向力。所述扭矩和/或角度控制TAC(132)用于至少基于直接或间接感测和/或计算的方向盘角度来控制车轮转向角,并且通过控制所述反馈扭矩致动器来提供反馈控制,以生成目标反馈扭矩和目标转向感觉,并且因此减少或消除车辆悬架所提供的驾驶员反馈,使得如果转向控制中存在故障从而丧失了辅助,则转向力度将足够低以供驾驶员安全地处置,因此不需要失效-操作转向齿轮。操作转向齿轮。操作转向齿轮。
技术研发人员:J
受保护的技术使用者:感知公司
技术研发日:2020.09.18
技术公布日:2022/5/17
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。