应用于massive-mimo天线的远程电调装置
技术领域
1.本技术涉及5g天线技术领域,尤其涉及一种应用于massive-mimo天线的远程电调装置。
背景技术:
2.随着5g时代的快速发展,运营商亟需大幅度拓宽5g基站的布局,但是面对5g基站能耗高、覆盖率低的明显短板,现有技术越来越广泛地采用具有远端电调(remote electrical tilt,ret)功能的大规模阵列(massive-mimo)天线以克服上述短板。
3.目前,5g massive-mimo(8
×
12或者8
×
8阵列)天线全部沿用4g基站天线的ret方案。其中,一种方案是,利用直流减速电机的转动,带动螺杆旋转,螺杆与滑块的螺旋形槽相互作用,将螺杆的顺、逆时针旋转运动转化为滑块的往复直线运动,进而带动与滑块同步固定的移相器介质的直线往复运动。此方案常利用两组螺杆滑块分别带动两组移相器组阵,或者其他组合方式。
4.另一种方案是,利用直流减速电机的转动,通过直(或锥)齿轮组或者蜗轮蜗杆,带动刚性传动轴,而传动轴上阵列固定齿轮,且每个齿轮与移相器介质直接或者间接组成齿轮齿条机构,从而使得电机根据顺时针或逆时针旋转运动,转化为移相器介质的往复直线运动。此方案通常是利用两个电机分别带动两组(每组8个)齿轮组阵,齿轮组阵的齿顶深入移相器腔体,直接与移相器介质上的齿条配合实现运动;或者采用一个电机带动一组齿轮,齿轮与带齿条的滑块配合运动,滑块再与16组移相器介质固定,从而带动移相器介质运动。
5.由于上述两种方案依然沿用4g天线的设计,故而在5g应用中存在诸多弊端:1.使用直流减速电机,无论是有刷电机还是无刷电机,均需要通过行星齿轮组减速来增大扭矩,存在能量损失和失效风险;2.当前天线可用的直流转动电机最小尺寸为极大地限制5gmassive-mimo天线的扁平化(变薄)设计;3.传统的转动电机,要实现旋转运动转化为直线运动,必须要通过螺杆滑块或者齿轮齿条等机构来实现,存在较大的摩擦力,能量转化率较低;4.massive-mimo天线的布局限制,使得传统ret的传动机构只能边缘化放置,从而在电机输出到移相器活动介质之间,必须通过齿轮(齿条)组、涡轮蜗杆或者螺杆滑块等装置来实现动力转接,加剧了能量损失和失效风险。
技术实现要素:
6.为了克服现有技术的不足,本技术旨在提供一种应用于massive-mimo天线的远程电调装置,以解决上述弊端中的一个或者多个技术问题。相比于现有技术,本技术结构更简单、能量转化效率更高、噪音更小、失效风险更低、布局更轻薄且成本更低。
7.为了实现上述目的,本技术提供一种应用于massive-mimo天线的远程电调装置,具体包括底板,所述底板的一侧贴合设置有两组移相器模块、传动模块和动力控制模块。
8.所述传动模块为滑块机构,设置于所述两组移相器模块之间,所述滑块机构与所述两组移相器模块固定连接;所述动力控制模块叠层设置于所述传动模块上,所述动力控
制模块内设线性马达,为所述两组移相器模块做直线往复运动提供机械力。
9.进一步的,所述滑块机构包括第一方向滑轨,所述第一方向滑轨固定在所述底板上,所述第一方向滑轨上设置有第一方向滑块,所述第一方向滑块固定连接所述两组移相器模块。
10.所述第一方向滑轨包括两条平行设置的滑道,在两条滑道之间搭载设置有第二方向滑轨,所述第二方向滑轨上套设有第二方向滑块,在所述第二方向滑轨的两端设置有第二方向滑轨限位块,以限制所述第二方向滑块在所述第二方向滑轨上做直线往复运动。
11.进一步的,所述第一方向滑块上设有滑槽,所述第二方向滑块上设有卡接所述滑槽的限位结构,以限制所述第二方向滑块在所述滑槽内运动。
12.进一步的,所述第一方向滑块上设有滑槽,所述第二方向滑块包括主体和滑轮,所述滑轮的一端通过螺柱活动连接所述主体,所述滑轮的另一端可转动式卡接所述滑槽,以限制所述第二方向滑块在所述滑槽内运动。
13.进一步的,所述动力控制模块包括固定连接所述底板的底壳,所述底壳上固定设置所述线性马达和向所述线性马达发送指令的控制板,所述线性马达包括线性马达定子和线性马达转子,所述线性马达转子固定连接所述第二方向滑块。
14.进一步的,所述控制板包括直线编码器和输入输出口,所述直线编码器为所述线性马达提供动力来源,所述输入输出口为所述远程电调装置与设备端进行数据交换的通道。
15.进一步的,所述底壳上还固定设置有盖板,所述盖板上设置有第三孔结构,通过所述第三孔结构对所述线性马达转子与所述第二方向滑块进行固定。
16.进一步的,所述移相器模块为八个等间距排布的移相器单元组成的阵列,所述移相器单元包括金属腔体,所述金属腔体内置有两个pcb板,两个所述pcb板对应正负45
°
两个极化的电路;所述pcb板的两侧均贴合设置有滑动介质,所述滑动介质固定连接所述第一方向滑块。
17.进一步的,所述pcb板上设置有电路结构,所述电路结构为一出二设计。
18.进一步的,所述滑动介质上设置有第一孔结构,所述第一方向滑块上设置有第二孔结构,所述第一孔结构与所述第二孔结构固定连接。
19.进一步的,所述金属腔体独立成型,逐个单独安装于所述底板上。
20.进一步的,预设数量的金属腔体一体成型,分组安装于所述底板上。
21.进一步的,所述底板为金属板,所述金属腔体与所述底板一体成型。
22.进一步的,所述第一方向滑轨、所述第二方向滑轨固定块和所述第二方向滑轨一体成型。
23.进一步的,所述第一方向滑轨上设置有刚性波纹。
24.进一步的,所述第一方向滑轨上还设置有第一方向刻度指针,所述第一方向滑块上设置有第一方向刻度标识。
25.进一步的,所述底板的另一侧设置massive-mimo天线,所述massive-mimo天线的馈网与所述移相器模块实施电导通。
26.进一步的,在两组所述移相器模块远离所述底板的一侧,设置连接器,所述连接器与所述移相器模块实施电导通。
27.进一步的,在两组所述移相器模块远离所述底板的一侧,设置耦合网络模块,所述耦合网络模块的输出口与所述移相器模块中的电路输入口实施电导通。
28.进一步的,在两组所述移相器模块远离所述底板的一侧,设置滤波器模块,所述滤波器模块的输出口与所述移相器模块中的电路输入口实施电导通。
29.本技术提供一种应用于massive-mimo天线的远程电调装置,该远程电调装置将线性马达提供的动力,通过固定在线性马达下方的滑块机构传递至移相器,从而带动移相器做直线往复运动。本技术通过使用线性马达,从信号控制输入至射频性能的输出之间,涉及的力与运动均是单一线性的,不会产生扭矩造成扭曲、窜动、卡死、磨损等失效风险,并且突破了转动马达尺寸对扭矩的限制,可以在某一方向上将尺寸做得很小,利于massive-mimo天线的布局及保障5g设备的高速稳定性;本技术采用结构简单的滑块机构作为传动装置,运动单一可靠,相对摩擦小,噪音极低,极大提高能量转化效率,同时降低失效风险。因此,本技术提供的一种应用于massive-mimo天线的远程电调装置,可以颠覆传统的ret设计,使得massive-mimo天线更轻薄、可靠性更高,同时装配更低、零件成本更低,并可在5g设备整机设计中,重新规划各部件的功耗分配,进而降低5g aau系统功耗与成本。
附图说明
30.为了更清楚地说明本技术的技术方案,下面将对实施例中所需要使用的附图作简单地介绍,显而易见地,对于本领域普通技术人员而言,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。
31.图1为本技术实施例提供的一种应用于massive-mimo天线的远程电调装置侧视示意图;
32.图2为图1的第一种实施例的立体示意图;
33.图3为图2所示实施例的详细立体示意图;
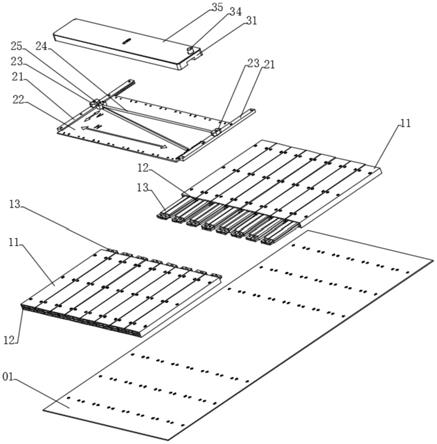
34.图4为图2所示实施例的爆炸示意图;
35.图5为图1中移相器模块的移相器单元的立体示意图;
36.图6为图5所示移相器单元的爆炸示意图;
37.图7为图1中传动模块的第一种实施例立体示意图;
38.图8为图7所示传动模块的爆炸示意图;
39.图9为图7所示传动模块的正视示意图;
40.图10为图7所示实施例中第一方向滑轨的立体示意图;
41.图11为图7所示实施例中第二方向滑块的优化结构立体示意图;
42.图12为图11所示第二方向滑块的爆炸示意图;
43.图13为图1中动力控制模块的第一种实施例的爆炸示意图;
44.图14为图7所示传动模块与图13所示动力控制模块的配合示意图;
45.图15为图7所示传动模块的第二种实施例爆炸示意图;
46.图16为图13所示动力控制模块的第二种实施例爆炸示意图;
47.图17为包含图15和图16所示实施例的装置立体示意图;
48.图18为图1的第二种实施例的立体示意图;
49.图19为图18所示第二种实施例的爆炸示意图;
50.图20为图18所示第二种实施例中第一方向滑块的立体示意图。
51.其中:01-底板,1-移相器模块,11-金属腔体,12-pcb板,1211-电路结构,13-滑动介质,1311-第一孔结构,2-传动模块,21-第一方向滑轨,2111-刚性波纹,2112-刻度指针,22-第一方向滑块,2211-滑槽,2212-第一方向标识,2213-第二方向标识,2214-第二孔结构,2215-第一方向刻度标识,23-第二方向滑轨限位块,24-第二方向滑轨,25-第二方向滑块,251-主体,2511-限位结构,252-滑轮,253-螺柱,26-简版第一方向滑块,3-动力控制模块,31-底壳,32-线性马达定子,33-线性马达转子,34-控制板,3411-输入输出口,35-盖板,3511-第三孔结构。
具体实施方式
52.下面将结合本技术实施例中的附图,对本技术实施例中的技术方案进行完整、清楚的描述。显然,所描述的实施例仅仅是本技术一部分实施例,而不是全部的实施例。基于本技术中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本技术保护的范围。
53.为便于理解本技术实施例的技术方案,以下首先对本技术实施例所涉及到的一些概念进行说明。在本技术实施例中,术语-电导通,表示通过直接或间接的焊接、弹性触点、缝隙耦合等形式实现高频射频电路的通路;术语-固定,应做广义理解,可以是一体化制造,亦可以是可拆卸式安装,还可以是局部活动件的机械式连接。
54.需要提前说明的是,为了便于更形象化描述本技术实施例的技术方案,基于常规的装置形态,本技术实施例设定底板为长方形形态,并将底板长边所处的轴位定义为第一方向(在附图中表示为v),将底板宽边所处的轴位定义为第二方向(在附图中表示为h),本技术实施例中,第一方向v与第二方向h相互垂直,即第一方向v与第二方向h的运动机构是正交的,但需要说明的是,第一方向标识v和第二方向标识h不做特指,可用其他字符替换。
55.参见图1,为本技术实施例提供的一种应用于massive-mimo天线的远程电调装置侧视示意图。本技术实施例提供一种应用于massive-mimo天线的远程电调装置,具体包括底板01,以及在底板01一侧贴合固定设置的两组移相器模块1、传动模块2和动力控制模块3。而在底板01的另一侧设置massive-mimo天线,天线的馈网与移相器模块1中的电路输出口实施电导通。
56.本技术实施例中,底板01为金属板,作为其他部件的安装载体,还可作为前端天线阵列的角反射器;传动模块2为滑块机构,且滑块机构与两组移相器模块1固定连接;动力控制模块3叠层设置于传动模块2上,动力控制模块3内设线性马达,为所述两组移相器模块1做直线往复运动提供机械力。
57.具体的,移相器模块1、传动模块2和动力控制模块3沿着底板01的长边(即第一方向v)放置,移相器模块1分两组对中放置于底板长边的两端,中间区域放置传动模块2和动力控制模块3,通常的,动力控制模块3叠层放置在传动模块2远离底板01的一侧。
58.需要简单说明的是,传动模块2和动力控制模块3叠层布局在中间,并与两组移相器模块1的活动部件固定,从而使得动力控制模块3可直接控制移相器模块1的相位变化,此布局避免了额外的动力转接机构,减少了零件与装配,解决了现有方案中,传动机构复杂、高噪音、高失效风险和高成本问题。其次,两组移相器模块1远离底板01的一侧空间完全留
空出来,且与传动模块2和动力控制模块3的叠层布局互不干涉,此布局尽可能地减小了远程电调(即ret)装置中机械运动部分的尺寸,在有限的空间里可以留空更多的区域,利于天线射频功能的其他模块布局,解决了现有方案在massive-mimo天线背部空间占比大、空间利用率低的问题。由此可见,本技术实施例提供的ret装置改善了现有技术中分体式、转接式等装置结构复杂、布局臃肿、体积过大的缺陷,为massive-mimo天线高度集成、轻薄化、低成本提供了可行性。
59.实施例一:
60.参见图2-图4,为图1的第一种实施例的立体示意图和具体爆炸示意图。结合图1至图4可以看出,移相器模块1为两组对中布局的阵列结构,每组阵列结构由八个移相器单元组成,两组阵列结构共包括十六个移相器单元。其中,每个移相器单元的长边与第一方向v(即底板01长边所在轴位)保持一致,每组阵列结构沿着第二方向h(即底板01宽边所在轴位)等间距排布。
61.具体的,参考图5-图6,为移相器模块中移相器单元的一种立体示意图。从图上可以看出,每个移相器单元又包括金属腔体11、pcb板12和滑动介质13。其中,金属腔体11分为两个两端开放的空腔,每个空腔均内置pcb板12,而两个pcb板12则对应正负45
°
两个极化的电路;每个pcb板12上还设置有电路结构1211,该电路结构1211为一出二设计,且每个pcb板12上下两侧均贴合设置两个滑动介质13,每个滑动介质13上设置有第一孔结构1311。由此可知,总共四个滑动介质13相对两个pcb板12滑动,加上金属腔体11自身的屏蔽效应,与电路1211相互作用改变了输入输出口间的相位。滑动介质13作为仅可沿第一方向“v”线性运动的滑块,金属腔体11与两个pcb板12等效为滑轨,此类滑块机构,结构简单、运动可靠,与射频性能中相移量正比于位移量的关系高度契合,利于优化5gmassive-mimo电调天线的布局。
62.本技术实施例中,十六个金属腔体11可以是各自独立成型,逐个单独安装在底板01上,通过此类设计,可以在早期投入有限的前提下,简化零件加工,便于灵活调试。也可以是将十六个金属腔体按照具体需要分成设定数量的组数,然后每组设定数量的金属腔体11一体成型,再分组安装在底板01上;还可以是十六个金属腔体11与底板01直接一体成型,通过此类设计,又可以在定版转产时,减少需要装配的零件数量,降低装配工时,降低成本,提高一体化程度。在本技术实施例中,金属腔体11也可以与底板01一体成型。
63.需要说明的是,电路结构1211并非限定为一出二设计,亦可以根据输入端接口需求改为一出一、二出四、一出四等设计。
64.本技术实施例中,关于移相器模块1的机械运动方面,在第一方向v上,每组八个移相器单元阵列的所有滑动介质13同步运动,即同进同出;两组对称设置的阵列之间也是同步运动,当其中一组阵列的所有滑动介质13处于滑出金属腔体11的状态时,对称设置的另一组为滑入金属腔体11的状态,即此起彼伏。关于移相器模块1的电性能方面,所有移相器单元的相位变化完全同步。
65.参考图7-图9,为传动模块2的一种实施例的立体示意图、爆炸示意图和正视示意图。本技术实施例中,传动模块2为滑块机构,该滑块机构包括固定在底板01上的第一方向滑轨21,该第一方向滑轨21上设置有第一方向滑块22,第一方向滑块22固定连接两组移相器模块1,从而可带动两组移相器模块1在第一方向v上做直线往复运动。
66.第一方向滑轨21包括两条平行设置的滑道,在两条滑道之间搭载设置有第二方向滑轨24,所述第二方向滑轨24上套设第二方向滑块25,在第二方向滑轨24的两端设置有第二方向滑轨限位块23,以限制第二方向滑块25仅能在第二方向滑轨24上做直线往复运动。本技术实施例中,第一方向滑轨21、第二方向滑轨限位块23和第二方向滑轨24可以为一体化设计。
67.具体的,第一方向滑块22上设有滑槽2211,第二方向滑块25上设有卡接滑槽2211的限位结构2511,以限制第二方向滑块25在滑槽2211内运动,本技术实施例中,第二方向滑块25和限位结构2511一体成型。特别地,改变滑槽2211的坡度,即第一方向标识2212的v向与第二方向标识2213的h向的投影长度之比,就可以改变传动模块2输入端至输出端的推拉力比,通过此结构,解决了尺寸限制条件下,线性马达可能面临的推拉力不足,难以带动十六个移相器单元的问题。
68.更具体的,第一方向滑块22上设置有第二孔结构2214,而第二孔结构2214与滑动介质13的第一孔结构1311固定连接,从而实现了移相器模块1和传动模块2的固定,当第二孔结构2214在第一方向v上做直线运动时,带动第一孔结构1311同步运动。
69.更具体的,第一方向滑轨21上还设置有第一方向刻度指针2112,第一方向滑块22上设置有第一方向刻度标识2215,随着第一方向滑块22的运动,第一方向刻度指针2112指向第一方向刻度标识2215的不同值,以显示移相器模块1的电下倾角。
70.由此可见,本技术实施例中,传动模块2为滑块机构,主要由第一方向滑轨21、第一方向滑块22、第二方向滑轨限位块23、第二方向滑轨24和第二方向滑块25组成。由图上可以明显看出,第一方向滑轨21两条平行设置的滑道固定在底板01上,从而限制第一方向滑块22仅能在第一方向v上做直线运动;两个对置的第二方向滑轨限位块23将第二方向滑轨24间接地固定在底板01上,第二方向滑轨24限制第二方向滑块25仅能在第二方向h上做直线运动;同时,第二方向滑块25的限位结构2511同步限制第二方向滑块25仅能在第一方向滑块22上的滑槽2211内做斜向直线运动,此结构实现了力与运动的方向及大小的转变,并保证了第一方向v和第二方向h直线运动的同步性,解决了移相器模块1在第一方向v上滑动距离过大时,机械运动部分因空间受限而难以布局的问题。
71.参考图10,为第一方向滑轨21的立体示意图。为了进一步优化结构,本技术实施例在第一方向滑轨21上设置刚性波纹2111,该刚性波纹2111的设置有利于降低第一方向滑块22相对第一方向滑轨21运动时的摩擦阻力,从而改善摩擦带来的能量损失、噪音、失效风险等缺陷。
72.参考图11-图12,其中,图11为动力控制模块3的一种实施例的爆炸示意图,图12为动力控制模块3与动力控制模块2的配合示意图。由图13可以看出,动力控制模块3包括固定连接底板01的底壳31,底壳31上固定设置有线性马达、控制板34和盖板35。具体的,线性马达包括线性马达定子32和线性马达转子33;盖板35上设置有第三孔结构3511,由图14可以看出,通过第三孔结构3511,可对线性马达转子与第二方向滑块25进行固定;控制板34包括直线编码器和输入输出口3411,直线编码器主要为线性马达提供动力来源,而输入输出口3411则作为远程电调装置与设备端进行数据交换的通道。
73.由此可见,动力控制模块3主要由底壳31、线性马达定子32、线性马达转子33、控制板34和盖板35组成。动力控制模块3输出的力与运动沿第二方向h,通过传动模块2的转化,
改变力与运动至第一方向v,带动移相器模块1的活动件做第一方向v直线运动,实现相位变化。
74.一般而言,线性马达定子32和线性马达转子33,一个是线圈,另一个是永磁体。因此,在工作时,控制板34上的直线编码器给线圈一个电信号,利用洛伦兹力控制动子(转子)33在定子32轨道内的直线运动,同时通过霍尔效应获得其运动速度及位置的反馈,进而调整下一步运动;线性马达转子33与其下方的第二方向滑块25固定连接,从而通过传动模块2将力和运动传递给移相器模块1。底壳31和盖板35需要一定的密封性,屏蔽其内部电场和磁场对外部高频电磁场的影响。控制板34上的输入输出口3411,作为本技术实施例的控制口,与设备端进行数据交换。盖板35上的孔3511,除了作为最终安装时,线性马达转子33与第二方向滑块25固定的操作口,还可以作为电机运作状态的观测孔。通过线性马达的使用,电能转化效率更高,力的单向线性更好,推拉力更大,解决了当前所有方案应用中,转动马达带来的扭矩不足、能量损失大、卡死堵转风险高等问题。
75.在本技术实施例布局的最终应用中,可以在两组移相器模块1远离底板01的一侧放置连接器,连接器与移相器模块1中的电路输入口实施电导通,此组合为普通的5g massive-mimo电调天线;也可以在两组移相器模块1远离底板01的一侧放置耦合网络模块,其输出口与移相器模块1中的电路输入口实施电导通,此组合为带校准功能的5g massive-mimo电调天线;还可以在两组移相器模块1远离底板01的一侧放置滤波器模块,其输出口与移相器模块1中的电路输入口实施电导通,此组合为带滤波功能的5g massive-mimo电调天线。
76.综上所述,本技术实施例一提供一种全新的应用于massive-mimo天线的远程电调装置,具体包括底板、移相器模块、传动模块和动力控制模块。其中,底板为一块金属板,该金属底板既可作为其他部件的安装载体,还可作为前端天线阵列的角反射器(反射板);移相器模块包括金属腔体、pcb板和滑动介质,该移相器模块选用推拉式滑动介质移相器,其滑动介质相对金属腔体和pcb板做直线往复运动,即可实现射频相移量的变化;传动模块包括滑轨、滑块和限位结构,该传动模块仅使用滑块机构,在滑轨限制下,仅有线性自由度的滑块做直线往复运动;动力控制模块包括金属底壳、线性马达定子及转子、控制板和金属盖板,该动力控制模块使用线性马达(线性推力电机),作为电信号转化机械运动的力的来源,能量转化效率高、损失小。另外,本技术实施例一利用斜坡原理增大推力,简单的结构即可降低电机选型时尺寸对力的限制,天线布局更优。
77.实施例二:
78.实施例二是在实施例一的基础上进行了部分优化调整,重点是对第二方向滑块25进行了结构上的优化。具体如图13-图14所示,为第二方向滑块25的优化结构立体示意图和爆炸示意图,由图上可知,第二方向滑块25主要由主体251和滑轮252两部分组成,其中,滑轮252的一端通过螺柱253与主体251活动连接,滑轮252的另一端可转动式卡接滑槽2211,从而在限制第二方向滑块25仅能在滑槽2211内做往返运动的同时,滑轮252自身也在滑槽2211内以螺柱253为轴心转动。由此,第二方向滑块25与第一方向滑块22接触运动时,滑轮252的转动极大降低了与滑槽2211的摩擦阻力,进一步改善了摩擦相关的缺陷问题。
79.关于其他部分的描述和相关理论,此处不再赘述,具体参考实施例一。
80.实施例三:
81.如图15-图17所示,为实施例三中传动模块2和动力控制模块3的立体示意图和结合示意图。由于实施例三的结构原理及其相关理论均与实施例一是一致的,故此处不再详细描述,仅简单进行一下说明。参考图15可知,实施例三将实施例一中的传动模块2进行了部分调整和优化,对比图7、图8与图15、图14与图17可以明显看出,第一方向滑轨、第二方向滑轨与滑块的结构可做形式或数量上的拓展实践;滑槽机构亦可在数量、方向或者形式上进行拓展,以提高两个方向的力与运动的同步性,降低力矩式阻尼,因此,类似性质的拓展实施例均在本技术保护范围内。相应的,结合图13、图14、图16和图17可知,动力控制模块3中线性马达定子32与线性马达转子33以及控制板34也可以在实施例一的理论基础上,进行不同的形式变换或者不同的组件组合,因此,类似性质的拓展实施例也应当在本技术的保护范围内。
82.实施例四:
83.实施例四为本技术实施例附图1所示远程电调装置侧视图的另一种表现形式,具体参考18-图20,其中图18-图19为实施例四的立体示意图和爆炸示意图,图20为实施例四中第一方向滑块的立体示意图。由于实施例四依然是以本技术的大构架为基础,进行了部分改进和优化调整,故而实施例四的结构原理及其相关理论仍然与实施例一保持一致,故此处不再详细描述结构关系和运动理论,仅简单进行一下说明,具体细节请参考实施例一。
84.通过对照图2与图18、图4与图19以及图9与图20可知,传动模块2可以做简化,而无需转变力与运动的方向及大小,动力控制模块3输出的力与运动的方向沿着第一方向v,通过线性马达转子33与简版第一方向滑块26的固定,直接带动移相器模块1的直线运动;动力控制模块3的外壳即作为第一方向的滑轨,亦可简化结构。通过此类结构,在动力控制模块3与移相器模块1对力和行程的供需匹配时,进一步减少零件数量,降低摩损耗,优化了布局,降低了成本。
85.综上所述,相比于现有技术,本技术实施例的优势在于:结构更简单,能量转化效率更高,噪音更小,失效风险更低,布局更轻薄,成本更低。
86.第一,动力控制模块使用线性马达,突破了转动马达尺寸对扭矩的限制,可以在某一方向上将尺寸做得很小,即可做得很薄,利于massive-mimo天线的布局。
87.第二,相比传统的转动马达,线性马达直接利用洛伦兹力,电能转化效率更高,且线性马达具有高速、推力大、位移精准的特点,能够为5g设备的高速稳定性提供保障。
88.第三,通过线性马达直接带动移相器的滑动介质做直线往复运动,从信号控制输入至射频性能的输出之间,涉及的力与运动均是单一线性的,不会产生扭矩造成扭曲、窜动、卡死、磨损等失效风险。
89.第四,传动模块摒弃了传统ret方案的齿轮(齿条)组、涡轮蜗杆、螺杆滑块等复杂机构,而仅采用结构简单的滑块机构,由于该滑块机构为2级正交运动机构,即两个方向上滑块的运动方向相互垂直,运动相关联,且自由度相互限制。因此,运动单一可靠,相对摩擦小,噪音极低,能够减少大量无用功的产生,进而大幅度提高能量转化效率,同时避免传统方案中扭矩转化推拉力过程中的失效风险,以及更利于massive-mimo天线的扁平化设计。
90.第五,传动模块设计简单,零件单一,相比传统ret方案,需要的模具更少,安装工时更少,成本极低。
91.第六,移相器模块选用推拉式滑动介质移相器,其相移量变化正比于滑动介质的
线性位移,确保了机械线性运动改变射频性能的稳定性;且此类移相器呈长扁平状,有利于massive-mimo天线的阵列布局。
92.第七,优化版的传动模块,利用简单的斜面原理增大推力,可以在所需推拉力一定的情况下,线性马达体积更小、更薄,进一步优化massive-mimo天线布局。
93.因此,本技术实施例提供的ret装置,颠覆了传统的ret设计,可以使massive-mimo天线做得更轻薄、可靠性更高,同时装配、零件成本更低,并可在5g设备整机设计中,重新规划各部件的功耗分配,进而降低5g aau的系统功耗与成本。
94.本技术提供一种应用于massive-mimo天线的远程电调装置,具体包括底板01,底板01的一侧贴合设置有两组移相器模块1、传动模块2和动力控制模块3;所述传动模块2为滑块机构,设置于所述两组移相器模块1之间,所述滑块机构与所述两组移相器模块1固定连接;所述动力控制模块3叠层设置于所述传动模块2上,所述动力控制模块3内设线性马达,为所述两组移相器模块1做直线往复运动提供机械力。
95.由以上技术方案可知,本技术提供一种应用于massive-mimo天线的远程电调装置,该远程电调装置将线性马达提供的动力,通过固定在线性马达下方的滑块机构传递至移相器,从而带动移相器做直线往复运动。本技术通过使用线性马达,从信号控制输入至射频性能的输出之间,涉及的力与运动均是单一线性的,不会产生扭矩造成扭曲、窜动、卡死、磨损等失效风险,并且突破了转动马达尺寸对扭矩的限制,可以在某一方向上将尺寸做得很小,利于massive-mimo天线的布局及保障5g设备的高速稳定性;本技术采用结构简单的滑块机构作为传动装置,运动单一可靠,相对摩擦小,噪音极低,极大提高能量转化效率,同时降低失效风险。因此,本技术提供的一种应用于massive-mimo天线的远程电调装置,可以颠覆传统的ret设计,使得massive-mimo天线更轻薄、可靠性更高,同时装配更低、零件成本更低,并可在5g设备整机设计中,重新规划各部件的功耗分配,进而降低5g aau系统功耗与成本。
96.以上结合具体实施方式和范例性实例对本技术进行了详细说明,使本领域技术人员能够理解或实现本技术,不过这些说明并不能理解为对本技术的限制。本领域技术人员理解,在不偏离本技术精神和范围的情况下,可以对本技术技术方案及其实施方式进行多种等价替换、修饰或改进,这些均落入本技术的范围内。本技术的保护范围以所附权利要求为准。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。