技术特征:
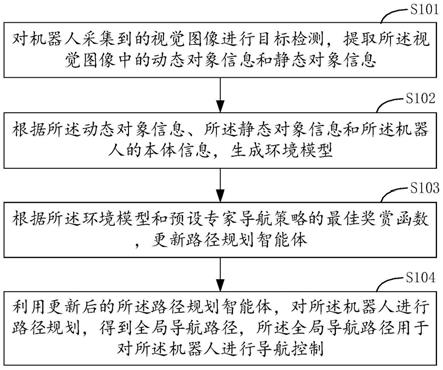
1.一种机器人视觉导航方法,其特征在于,包括:对机器人采集到的视觉图像进行目标检测,提取所述视觉图像中的动态对象信息和静态对象信息;根据所述动态对象信息、所述静态对象信息和所述机器人的本体信息,生成环境模型;根据所述环境模型和预设专家导航策略的最优奖赏函数,更新路径规划智能体;利用更新后的所述路径规划智能体,对所述机器人进行路径规划,得到全局导航路径,所述全局导航路径用于对所述机器人进行导航控制。2.如权利要求1所述的机器人视觉导航方法,其特征在于,所述根据所述动态对象信息、所述静态对象信息和所述机器人的本体信息,生成环境模型,包括:确定所述动态对象信息和所述静态对象信息与所述本体信息之间的实际位置关系;将所述实际位置关系结合预设的危险距离和最大感知距离,对所述机器人进行避障判断,以建立所述环境模型。3.如权利要求1所述的机器人视觉导航方法,其特征在于,所述根据所述环境模型和预设专家导航策略的最优奖赏函数,更新路径规划智能体,包括:根据所述环境模型和所述机器人的当前状态信息,确定随机模型预测控制器,所述随机模型预测控制器满足预设的最优控制成本函数;根据所述最优控制成本函数,确定所述预设专家导航策略的最优奖赏函数;根据所述最优奖赏函数,对所述路径规划智能体进行更新。4.如权利要求3所述的机器人视觉导航方法,其特征在于,所述最优控制成本函数为:其中,c
speed
表示对速度施加的惩罚系数,c
crach
表示对碰撞施加的惩罚系数,i为指示器函数,v
x
表示所述机器人在x方向上的实际速度,表示所述机器人在x方向上的期望速度,x
t
表示t时刻的状态信息。5.如权利要求3所述的机器人视觉导航方法,其特征在于,所述根据所述最优控制成本函数,确定所述预设专家导航策略的最优奖赏函数,包括:根据所述最优控制成本函数和所述预设专家导航策略,确定所述预设专家导航策略的奖赏函数集合;利用优化函数,对所述奖赏函数集合进行优化,得到所述预设专家导航策略的最优奖赏函数。6.如权利要求5所述的机器人视觉导航方法,其特征在于,所述奖赏函数集合中的每个奖赏函数满足预设条件,所述预设条件为:奖赏函数满足预设条件,所述预设条件为:表示所述预设专家导航策略的转移矩阵,p
a
表示非专家导航策略的转移矩阵,i为指示器函数,r为所述奖赏函数,γ为折扣因子。7.如权利要求5所述的机器人视觉导航方法,其特征在于,所述优化函数为:
其中,s表示状态空间,q
π
(s,a1)表示在状态s时采用预设专家导航策略a1时的q函数,q
π
(s,a)表示在状态s时采用非专家导航策略a时的q函数,q函数表示未来奖励期望值。8.一种机器人视觉导航装置,其特征在于,包括:检测模块,用于对机器人采集到的视觉图像进行目标检测,提取所述视觉图像中的动态对象信息和静态对象信息;生成模块,用于根据所述动态对象信息、所述静态对象信息和所述机器人的本体信息,生成环境模型;更新模块,用于根据所述环境模型和预设专家导航策略的最优奖赏函数,更新路径规划智能体;规划模块,用于利用更新后的所述路径规划智能体,对所述机器人进行路径规划,得到全局导航路径,所述全局导航路径用于对所述机器人进行导航控制。9.一种机器人,其特征在于,包括处理器和存储器,所述存储器用于存储计算机程序,所述计算机程序被所述处理器执行时实现如权利要求1至7任一项所述的机器人视觉导航方法。10.一种计算机可读存储介质,其特征在于,其存储有计算机程序,所述计算机程序被处理器执行时实现如权利要求1至7任一项所述的机器人视觉导航方法。
技术总结
本申请公开了一种机器人视觉导航方法、装置、机器人及存储介质,通过对机器人采集到的视觉图像进行目标检测,提取视觉图像中的动态对象信息和静态对象信息,并根据动态对象信息、静态对象信息和机器人的本体信息,生成环境模型,以得到机器人移动过程的实时环境地图,便于机器人进行全局规划;再根据环境模型和预设专家导航策略的最优奖赏函数,更新路径规划智能体,以利用逆强化学习算法,提高机器人对不同环境进行路径规划时的环境适应性;最后利用更新后的路径规划智能体,对机器人进行路径规划,得到全局导航路径,从而实时更新全局导航路径,避免导航路径陷入局部最优,提高路径规划的准确度。路径规划的准确度。路径规划的准确度。
技术研发人员:万里红 刘娜 袁野 吴国栋 张赛
受保护的技术使用者:中原动力智能机器人有限公司
技术研发日:2021.12.31
技术公布日:2022/5/17
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。